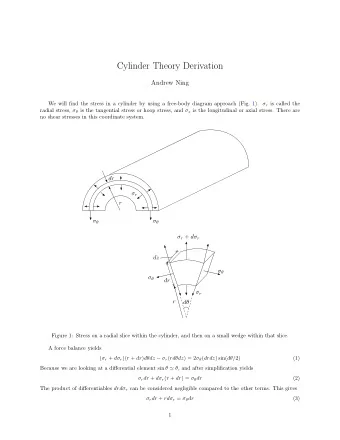
Optimal control of the cylinder wake flow using Proper Orthogonal Decomposition (POD) Michel Bergmann, Laurent Cordier & Jean-Pierre Brancher Michel.Bergmann@ensem.inpl-nancy.fr Laboratoire d’ ´ Energ´ etique et de M´ ecanique Th´ eorique et Appliqu´ ee UMR 7563 (CNRS - INPL - UHP) ENSEM - 2, avenue de la Forˆ et de Haye BP 160 - 54504 Vandoeuvre Cedex, France Optimal control of the cylinder wake flow using Proper Orthogonal Decomposition (POD) – p. 1/16
Outline I - Configuration and numerical method II - Proper Orthogonal Decomposition (POD) III - Reduced Order Model of the cylinder wake (ROM) IV - Optimal control formulation based on the reduced order model V - Closed loop results Conclusions and perspectives Optimal control of the cylinder wake flow using Proper Orthogonal Decomposition (POD) – p. 2/16
I - Configuration and numerical method Γ 4 Two dimensional flow around a circular cylinder Γ 1 y at R e = 200 Γ c γ ρ Γ 3 Viscous, incompressible x U and Newtonian fluid D Cylinder oscillation with a tangential velocity γ ( t ) Γ 2 Fractional steps method in time Finite Elements Method (FEM) in space Optimal control of the cylinder wake flow using Proper Orthogonal Decomposition (POD) – p. 3/16
I - Configuration and numerical method Iso pressure at t = 100 . Iso vorticity at t = 100 . 1.5 Authors S t C D C D 1 C L Braza et al. (1986) 0.2000 1.4000 C D , C L Henderson et al. (1997) 0.1971 1.3412 0.5 He et al. (2000) 0.1978 1.3560 0 this study 0.1983 1.3972 -0.5 Strouhal number and drag coefficient. 80 90 100 110 120 time units Aerodynamic coefficients. Optimal control of the cylinder wake flow using Proper Orthogonal Decomposition (POD) – p. 4/16
II - Proper Orthogonal Decomposition (POD) ◮ Introduced in fluid mechanics (turbulence context) by Lumley (1967). ◮ Look for a realization φ ( X ) which is closer, in an average sense, to the realizations u ( X ) . ( X = ( x , t ) ∈ D = Ω × R + ) �| ( u , φ ) | 2 � ◮ φ ( X ) solution of the problem : max . � φ � 2 φ ◮ Snapshots method, Sirovich (1987) : � C ( t, t ′ ) a ( n ) ( t ′ ) dt ′ = λ ( n ) a ( n ) ( t ) . T ◮ Optimal convergence L 2 norm (energy) of φ ( X ) ⇒ Dynamical order reduction is possible. ◮ Decomposition of the velocity field : N P OD � a ( i ) ( t ) φ ( i ) ( x ) . u ( x , t ) = i =1 Optimal control of the cylinder wake flow using Proper Orthogonal Decomposition (POD) – p. 5/16
III - Reduced Order Model of the cylinder wake (ROM) ◮ Galerkin projection of NSE on the POD basis : � � � � φ ( i ) , − ∇ p + 1 φ ( i ) , ∂ u ∂t + ( u · ∇ ) u = Re ∆ u . ◮ Integration by parts (Green’s formula) leads : � � φ ( i ) , ∂ u − 1 � p, ∇ · φ ( i ) � � � ( ∇ ⊗ φ ( i ) ) T , ∇ ⊗ u ∂t + ( u · ∇ ) u = Re − [ p φ ( i ) ] + 1 Re [( ∇ ⊗ u ) φ ( i ) ] . � � � � with [ a ] = a · n d Γ and ( A, B ) = A : B d Ω = A ij B ji d Ω . Γ Ω Ω i, j Optimal control of the cylinder wake flow using Proper Orthogonal Decomposition (POD) – p. 6/16
III - Reduced Order Model of the cylinder wake (ROM) ◮ Velocity decomposition with N P OD modes : N P OD � a ( k ) ( t ) φ ( k ) ( x ) . u ( x , t ) = u m ( x ) + γ ( t ) u c ( x ) + k =1 ◮ Reduced order dynamical system where only N gal ( ≪ N P OD ) modes are retained (state equations) : N gal N gal N gal d a ( i ) ( t ) � � � B ij a ( j ) ( t ) + C ijk a ( j ) ( t ) a ( k ) ( t ) = A i + d t j =1 j =1 k =1 N gal d γ � F ij a ( j ) ( t ) γ + G i γ 2 + D i d t + E i + j =1 a ( i ) (0) = ( u ( x , 0) , φ ( i ) ( x )) . A i , B ij , C ijk , D i , E i , F ij and G i depend on φ , u m , u c and Re . Optimal control of the cylinder wake flow using Proper Orthogonal Decomposition (POD) – p. 7/16
III - Reduced Order Model of the cylinder wake (ROM) Stabilization Integration and (optimal) stabilization of the reduced order dynamical system with γ = A sin(2 πS t t ) , A = 2 and S t = 0 , 5 . 0.8 1 0.7 0.6 0.5 �| a ( n ) |� 0.5 a ( n ) 0 0.4 0.3 -0.5 0.2 -1 0.1 0 0 2 4 6 8 10 1 2 3 4 5 6 7 8 9 10 time units index Temporal evolution of the 6 first POD Average amplitudes of POD modes. modes. − − − − projection (DNS) − − prediction before stabilization (low order model) · · · prediction after stabilization (low order model). Optimal control of the cylinder wake flow using Proper Orthogonal Decomposition (POD) – p. 8/16
IV - Optimal control formulation based on reduced order model ◮ Objective functional : � T � T N gal a ( i )2 + α � 2 γ ( t ) 2 dt. J ( a , γ ( t )) = J ( a , γ ( t )) dt = 0 0 i =1 α : regularization parameter (penalization). ◮ Adjoint equations : N gal N gal d ξ ( i ) ( t ) � � ( C jik + C jki ) a ( k ) ξ ( j ) ( t ) − 2 a ( i ) = − B ji + γ F ji + dt j =1 k =1 ξ ( i ) ( T ) = 0 . ◮ Optimality condition (gradient) : N gal N gal N gal dξ ( i ) F ij a ( j ) + 2 G i γ ( t ) ξ ( i ) + αγ. � � � δγ ( t ) = − D i + E i + dt i =1 i =1 j =1 Optimal control of the cylinder wake flow using Proper Orthogonal Decomposition (POD) – p. 9/16
IV - Optimal control formulation based on reduced order model ◮ γ (0) ( t ) done ; for n = 0 , 1 , 2 , ... and while a convergence criterium is not satisfied, do : 1. From t = 0 to t = T solve the state equations with γ ( n ) ( t ) ; → state variables a ( n ) ( t ) ֒ 2. From t = T to t = 0 solve the adjoint equations with a ( n ) ( t ) ; → adjoint variables ξ ( n ) ( t ) ֒ 3. Solve the optimality condition with a ( n ) ( t ) and ξ ( n ) ( t ) ; → objective gradient δγ ( n ) ( t ) ֒ → γ ( n +1) ( t ) = γ ( n ) ( t ) + ω ( n ) δγ ( n ) ( t ) 4. New control law ֒ ◮ End do. Optimal control of the cylinder wake flow using Proper Orthogonal Decomposition (POD) – p. 10/16
V - Closed loop results Generalities ◮ No reactualization of the POD basis. ◮ The energetic representativity is a priori different to the dynamical one : → possible inconvenient for control, ֒ → a POD dynamical system represents a priori only the dynamics (and ֒ its vicinity) used to build the low dynamical model. ◮ Construction of a POD basis representative of a large range of dynamics : ֒ → excitation of a great number of degrees of freedom scanning γ ( t ) in amplitudes and frequencies. Optimal control of the cylinder wake flow using Proper Orthogonal Decomposition (POD) – p. 11/16
V - Closed loop results Excitation 5 1500 4 3 2 1000 1 γ e 0 -1 500 -2 -3 -4 -5 0 0 10 20 30 40 50 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 time units S t ◮ γ = 0 : → 2 modes out of 100 are sufficient to represent 97% of the ֒ kinetic energy. ◮ γ = γ e : ֒ → 30 modes out of 100 are then necessary to represent 97% of the kinetic energy. Optimal control of the cylinder wake flow using Proper Orthogonal Decomposition (POD) – p. 12/16
V - Closed loop results Optimal control 3 3000 2 2500 1 2000 γ opt 0 1500 -1 1000 -2 500 -3 0 0 10 20 30 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 S t time units ◮ Reduction of the wake instationarity. γ opt ≃ A sin(2 πS t t ) with A = 2 . 2 and S t = 0 . 53 J ( γ e ) = 9 . 81 = ⇒ J ( γ opt ) = 5 . 63 . ◮ The control is optimal for the reduced order model based on POD. ◮ Is it also optimal for the Navier Stokes model ? Optimal control of the cylinder wake flow using Proper Orthogonal Decomposition (POD) – p. 13/16
V - Closed loop results Comparison of wakes’ organization ◮ No mathematical proof concerning the Navier Stokes optimality. a) no control γ = 0 b) optimal control γ = γ opt Isocontours of vorticity ω z . ◮ no control : γ = 0 ⇒ Asymmetrical flow. → Large and energetic eddies. ֒ ◮ optimal control : γ = γ opt ⇒ Symmetrization of the (near) wake. → Smaller and lower energetic eddies. ֒ Optimal control of the cylinder wake flow using Proper Orthogonal Decomposition (POD) – p. 14/16
V - Closed loop results Aerodynamic coefficients 1.5 0.5 1.4 1.3 C D C L 0 1.2 1.1 -0.5 1 10 20 30 40 50 60 70 10 20 30 40 50 60 70 time units time units ◮ Very consequent drag reduction : C D = 1 . 40 for γ = 0 et C D = 1 . 06 for γ = γ opt (more than 25% ). ◮ Decrease of the lift amplitude : C L = 0 . 68 for γ = 0 et C L = 0 . 13 for γ = γ opt . Optimal control of the cylinder wake flow using Proper Orthogonal Decomposition (POD) – p. 15/16
Conclusions and perspectives ◮ Conclusions Significative drag reduction minimizing the wake instationnarity of the ROM. Numerical costs (CPU and memory) negligible. ◮ Perspectives Improve the representativity of the low order model. → "Optimize" the temporal excitation γ e , ֒ → Mix snapshots corresponding to several differents dynamics ֒ (temporal excitations). Look for harmonic control γ ( t ) = A sin(2 π S t t ) with POD basis reactualization. Couple this optimal system with trust region methods (TRPOD) = ⇒ proof of convergence. Couple pressure with the POD dynamical system. Optimal control of the Navier Stokes equations. Optimal control of the cylinder wake flow using Proper Orthogonal Decomposition (POD) – p. 16/16
Recommend
More recommend
Unleash a World of Digital Possibilities—Browse, Share, and Explore Content Without Boundaries