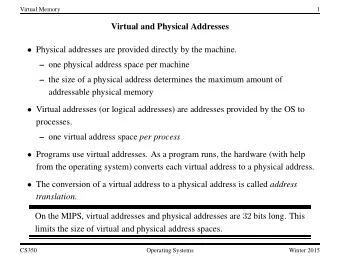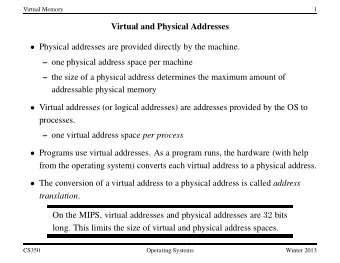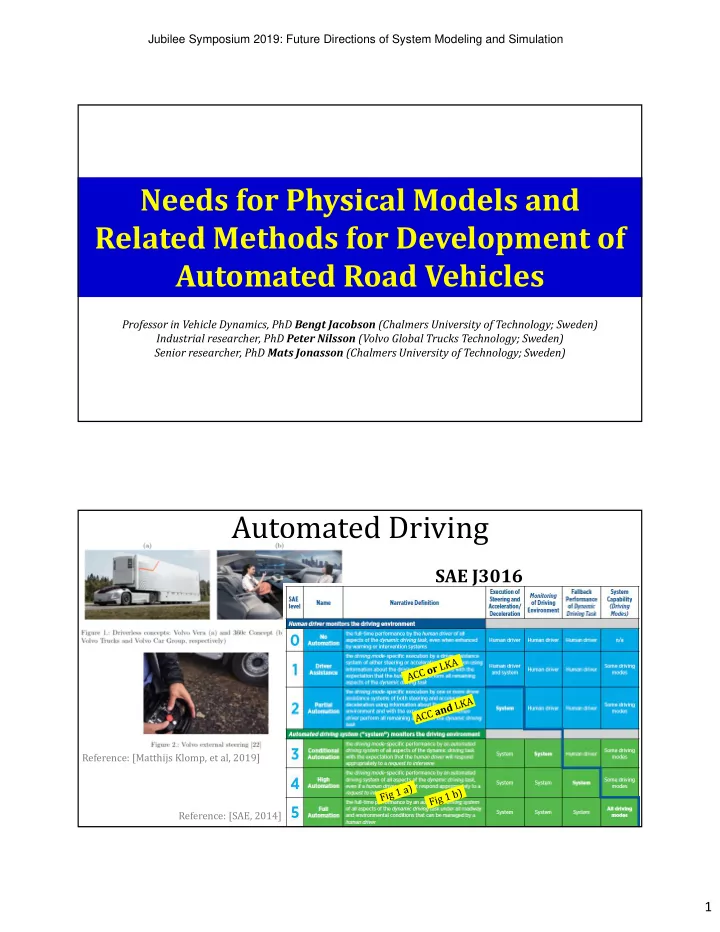
Jubilee Symposium 2019: Future Directions of System Modeling and Simulation Needs for Physical Models and Related Methods for Development of Automated Road Vehicles Professor in Vehicle Dynamics, PhD Bengt Jacobson (Chalmers University of Technology; Sweden) Industrial researcher, PhD Peter Nilsson (Volvo Global Trucks Technology; Sweden) Senior researcher, PhD Mats Jonasson (Chalmers University of Technology; Sweden) Automated Driving SAE J3016 Reference: [Matthijs Klomp, et al, 2019] Reference: [SAE, 2014] 1
Jubilee Symposium 2019: Future Directions of System Modeling and Simulation “ Function Architecture ” for vehicle motion & energy Capabilities Confidence Estimates, Requests Status, Route from human driver devices environment observations Management Human Machine Interface Vehicle Environment velocities Traffic Situation Traffic Situation Management accelerations Vehicle Motion Vehicle Motion Management wheel torques, axle steering angles Motion Support Devices Motion Support Device Management Reference: [Nilsson, 2017] Models for vehicle motion and energy control design physical models data ‐ driven models velocity & energy Route Management • macro traffic Human Machine Interface fuel / SOC Vehicle Environment motion relative Traffic Situation • drivers lane & traffic Management • micro traffic motion & individual Vehicle Motion tyre forces estimators • Management Motion Support sub ‐ system/actuator models Device Management 2
Jubilee Symposium 2019: Future Directions of System Modeling and Simulation Next speakers Route Management Human Machine Interface Vehicle Environment Traffic Situation Management Vehicle Motion Management Motion Support Device Management Traffic Situation Management, Dynamically Feasible Trajectories, Peter Nilsson, Volvo Trucks 3
Jubilee Symposium 2019: Future Directions of System Modeling and Simulation Examples of challenges for TSM Behaviour planning (Tactical decision) Motion Planning (Trajectory planning) Predictions of Predictions of surrounding surrounding Sensor traffic and VRUs imperfections traffic and VRUs Collision free Dynamically and occlusions Situation trajectories feasible Comfortable assessment trajectories and Computational Consistent and predictable efficient predictable trajectories methods behaviour Functional safety Vehicle Longitudinal and Lateral Control Robust control Transitions Thrust and between comfort driving modes Trajectory planning “Trajectory planning is a generalization of path planning, involved with planning the state evolution in time while satisfying given constraints on the states and actuation” Commonly used methods: Numerical optimization (e.g. MPC) • • Graph search (e.g. A*) Trajectory planning example: left curve, tractor semi-trailer • Neural network (e.g. Nvidia PilotNet) • ... 4
Jubilee Symposium 2019: Future Directions of System Modeling and Simulation Heavy duty combination vehicles Example of motion constraints: • Position of first unit • Position of trailer units (off-tracking) • Roll-over threshold (rearward amplification) ... • Trajectory planning modelling Example of modelling: • One-track models : 𝑦� � 𝑔 𝑦, 𝑣, 𝑥 Possible states for A-double • • 1st unit (tractor) : 𝑤 � , 𝑤 � , 𝜔� � 2nd unit (trailer) :∆𝜔 � , Δ𝜔� � • 3rd unit (dolly) :∆𝜔 � , Δ𝜔� � • • 4th unit (trailer) :∆𝜔 � , Δ𝜔� � 5
Jubilee Symposium 2019: Future Directions of System Modeling and Simulation Vehicle variants and trajectory planning challenges Vehicle variant combinatorics: Powertrain : � 10^2 variants • • Chassis : � 10^3 variants • Vehicle load � 7 - 120t (incl. different heights to CoG) • Vehicle units : 1-4 Challenge: Trajectory planning example: Roundabout, tractor semi-trailer Trajectory planning methodology needs to scalable and robust with respect to variant combinatorics Vehicle Motion Management, Road friction estimation, Mats Jonasson 6
Jubilee Symposium 2019: Future Directions of System Modeling and Simulation Challenges for VMM Reference: [Matthijs Klomp, et al, 2019] Road condition – road friction More than 10% of all accidents occur because of slippery conditions* In the US: yearly approx 500 000 accidents of which 1800 are deadly* � ABS activation, friction can be found 𝜈 � � � Definitions: force (N) Low friction 0 � 𝜈 � 0.4 high friction Mid friction 0.4 � 𝜈 � 0.7 𝑔 � 𝜈𝑔 � High friction 0.7 � 𝜈 To estimate friction the tyre must at least be low friction excited to the nonlinear slip (%) region at “the bend” ~ 5% Most driving take place here, not possible to distinguish between low or high * Reference: [IVSS Road Friction Estimation Part II] friction * Reference: [ US Department of Transportation – Federal Highway Administration ** Reference: [Wallman. Tema vintermodell – olycksrisker vid olika vinterväglag] 7
Jubilee Symposium 2019: Future Directions of System Modeling and Simulation Confusion matrix of road friction Low (snow) High (dry asphalt) True friction Low • Vehicle speed can be False slippery warnings (snow) • adapted to friction AD Vehicle will drive unacceptably slow (not transport efficient) • AD Vehicle will drive too Vehicle speed can be fast (not safe) High adapted to friction • High frequency of (dry asphalt) accidents Assumed friction Reference: [Matthijs Klomp, et al, 2019] Methods for road friction estimation Optical measurement device Model-based estimator Machine learning estimator Use features without Contactless • • • Use the tyre as the knowledge of physics Requires a map from • sensor • Requires training texture to friction Requires knowledge • about tyre physics 8
Jubilee Symposium 2019: Future Directions of System Modeling and Simulation State-of-the art model-based estimator Pre-processing Friction estimator Wheel speeds, Tyre forces Kinetic and 𝜈̂ Inertial Meas. Syst. kinematic Steering angle Tyre slip models Features and correlation to friction Surface & road type are not available Correlation to in the sensor suite -> important to true friction use a new sensor e.g. a camera Temperature wheel speeds GPS Surface, Road Type Temperature, GPS, vehicle speed, surface and road type are important features for friction estimation Features 1...86 * Reference[Roychowdhury, et al, 2018] 9
Jubilee Symposium 2019: Future Directions of System Modeling and Simulation Challenges road friction estimation • General: • Difficult to identify friction for normal driving (low friction utilization) • Model-based: • Model uncertainties for different tyres - the physics is hard to model • The pre-processing is not accurate enough • Machine learning: • Generalizability of machine learning algorithms to various situations • Generalizability would require large testing • Training of machine learning algorithms require ground truth – road friction is hard to measure Reference [Jonasson, et al] 2018 Motion Devices, Virtual Verification, Wheel Model, Bengt Jacobson 10
Jubilee Symposium 2019: Future Directions of System Modeling and Simulation Models for Virtual Verification Route Management Human Machine Interface Vehicle Environment Environment Traffic Situation Mechatronic (other vehicles, Management Sensor relative lane edges, …) position Vehicle Motion Management Motion Support For Virtual Verification: Device Management Mecha ‐ absolute tronic position • Higher accurate and larger Actuator validity range than for control design. wheels • But only simulate ‐ able , no suspension need for linearized, inversion, etc. body …one view of model based engineering Computation/Simulation Interpret results, � ODE Explicit form modelling judge model validity � DAE Mathematical modelling (Modelica) Theoretical world Physical modelling � Drawing Real world Formulate Evaluate NOK OK Initial Final engineering Re-Design requirement Design Design fulfilment task (problem) Real-world testing 11
Jubilee Symposium 2019: Future Directions of System Modeling and Simulation Wheel model as example 104 tonnes, 33 m 𝜕 𝑤 � �𝟐 � 𝟒 � 𝟓 � 𝟑 � 𝟒� ⋅ 𝟑 � 𝟑𝟕 wheels 𝑤 � 𝑈 � � 𝑈 � 𝑈 �� 𝐺 � 𝐺 � 𝐺 � Wheel model use cases Control Longitudinal wheel rotation Control Longitudinal vehicle translation 𝜕 𝑤 � 𝑤 � 𝑈 � � 𝑈 � 𝑈 �� 𝐺 � 𝐺 � 𝐺 � 12
Recommend
More recommend
Unleash a World of Digital Possibilities—Browse, Share, and Explore Content Without Boundaries