Multiphase Modelling in Cancer Helen Byrne Wolfson Centre for - PowerPoint PPT Presentation
Lecture 1 Lecture 2 Lecture 3 Lecture 4 Multiphase Modelling in Cancer Helen Byrne Wolfson Centre for Mathematical Biology Mathematical Institute University of Oxford CRM, Barcelona, April 2018 Lecture 1 Lecture 2 Lecture 3 Lecture 4
Lecture 1 Lecture 2 Lecture 3 Lecture 4 Radiotherapy and Necrosis After some algebra, we deduce � B 1 0 ≤ x < R ∗ ( t ) , c ( x , t ) = 2 D x 2 λ R ∗ ( t ) ≤ x ≤ R ( t ) B 2 + A 2 x + where dR ∗ = − s 1 R ∗ ⇒ R ∗ ( t ) = R ∗ ( t i ) e − s 1 ( t − t i ) dt � R � � dR c ∞ − λ 2 D ( R − x ) [( R − R ∗ ) + ( x − R ∗ )] dx − s 1 R ∗ dt = s 0 R ∗ until (i) c = c ∗ on x = R ∗ (ii) next round of radiotherapy Exercise: plot dynamics of R ( t ) and R ∗ ( t ) .
Lecture 1 Lecture 2 Lecture 3 Lecture 4 Radiotherapy and Necrosis (3D Radial Symmetry) Analytical and simulation results showing evolution of necrotic tumour following treatment with single dose of radiotherapy. Clear evidence that nutrient mismatch on necrotic boundary alters tumour dynamics
Lecture 1 Lecture 2 Lecture 3 Lecture 4 Radiotherapy and Necrosis (3D Radial Symmetry) Simulation results showing response of two tumours to standard RT treatment over period of 6 weeks (2 Grays per day, Mon-Fri). LHS: tumour shrinks during treatment. RHS: tumour shrinks initially, but eventually evolves to periodic solution, with clear evidence of necrotic mismatch following RT. TD Lewin, H Enderling et al (2018) Bull Math Biol
Lecture 1 Lecture 2 Lecture 3 Lecture 4 Critique Recall that biological tissues are complex and heterogeneous How can we relax following assumptions in our PDE model? • Heterogeneity • In vivo tissues comprise ECM, immune cells, blood vessels, and fluid • Geometry: 1D → 2 D , 3 D • Tumours are often invasive, spreading in 2D and 3D • Mechanics: • Tumour cells may be mechanosensitive
Lecture 1 Lecture 2 Lecture 3 Lecture 4 Outline of Lectures • Lecture 1 : preliminaries • Lecture 2 : two-phase models • Lecture 3 : multiphase models • Lecture 4 : current work and open problems
Lecture 1 Lecture 2 Lecture 3 Lecture 4 Lecture 2 • Heterogeneity : phenomenological multiphase model for macrophage-based therapies • Geometry • Extension to 2D/3D • Symmetry breaking and invasion • Towards mechanics: two-phase model
Lecture 1 Lecture 2 Lecture 3 Lecture 4 Heterogeneity Consider tumour that comprises • tumour cells, n ( x , t ) • Dead or waste material, w ( x , t ) • Macrophages, m ( x , t )
Lecture 1 Lecture 2 Lecture 3 Lecture 4 Aside: Macrophages and Cancer
Lecture 1 Lecture 2 Lecture 3 Lecture 4 Aside: Macrophages and Cancer Macrophages tend to localise in low oxygen (hypoxic) tumour regions. Can we exploit this to deliver treatment to these tumour regions?
Lecture 1 Lecture 2 Lecture 3 Lecture 4 Governing Equations Tumour cells, n ( x , t ) ∂ 2 n ∂ n ∂ t + ∂ ∂ x ( nv ) = µ n ∂ x 2 + S n ( n , c , w ) Waste material, w ( x , t ) ∂ 2 w ∂ w ∂ t + ∂ ∂ x ( wv ) = µ w ∂ x 2 + S w ( n , m , c , w ) Macrophages, m ( x , t ) � � ∂ 2 m ∂ m ∂ t + ∂ ∂ x 2 − χ ∂ m ∂ a ∂ x ( mv ) = µ m + S m ( m , a ) ∂ x ∂ x where c ( x , t ) = externally-supplied nutrient and a ( x , t ) = macrophage chemoattractant, produced by tumour cells under hypoxia
Lecture 1 Lecture 2 Lecture 3 Lecture 4 Nutrient, c ( x , t ) ∂ 2 c 0 = D c ∂ x 2 − (Γ 0 + Γ 1 n + Γ 2 m ) c Chemoattractant, a ( x , t ) ∂ 2 a 0 = D a ∂ x 2 + S a ( c , n ) − Γ 3 a Velocity, v ( x , t ) � � ∂ 2 n ∂ 2 w ∂ 2 m ∂ v ∂ x 2 − χ ∂ m ∂ a ∂ x = µ n ∂ x 2 + µ w ∂ x 2 + µ m + S n + S w + S m ∂ x ∂ x i.e. ’no voids’ assumption ( n + w + m = 1)
Lecture 1 Lecture 2 Lecture 3 Lecture 4 If S n + S w + S m = 0 then � � ∂ x = µ n ∂ 2 n ∂ x 2 + µ w ∂ 2 w ∂ x 2 + µ m ∂ 2 m ∂ v ∂ x 2 − χ ∂ m ∂ a ∂ x ∂ x � � ⇒ v = µ n ∂ n ∂ x + µ w ∂ w ∂ x + µ m ∂ m m ∂ a and dR ∂ x − χ dt = v ( R ( t ) , t ) ∂ x PDE for n ( x , t ) becomes nonlinear reaction-advection-diffusion equation: � � � � �� ∂ n ∂ t = µ n ∂ ( 1 − n ) ∂ n − ∂ µ w ∂ w ∂ x + µ m ∂ n ∂ x − χ ( m ∂ a n ∂ x ) + S n ( n , c , w ) ∂ x ∂ x ∂ x where, for example, ˜ S n ( n , c , w ) = S ( c ) nw − E n ( c ) n − A n ( a ) nm � �� � � �� � � �� � proliferation death macrophage killing References: Ward and King (1997); Webb et al (2007); Chen et al (2014)
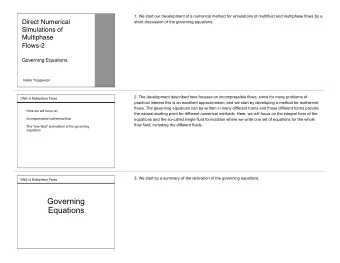
Lecture 1 Lecture 2 Lecture 3 Lecture 4 Numerical Results 1000 0.8 Tumour Time 0.6 500 0.4 0.2 0 0 0 50 100 150 200 250 1000 Time 0.2 M − φ e 500 0.1 0 0 − 3 0 50 100 150 200 250 x 10 1000 3 Prodrug Time 2 500 1 0 0 50 100 150 200 250 1000 0.08 0.06 Time Drug 500 0.04 0.02 0 0 50 100 150 200 250 Distance from centre Macrophage therapy slows tumour growth
Lecture 1 Lecture 2 Lecture 3 Lecture 4 Numerical Results 1000 0.8 Tumour Time 0.6 500 0.4 0.2 0 0 0 50 100 150 200 250 1000 Time 0.2 M − φ e 500 0.1 0 0 − 3 0 50 100 150 200 250 x 10 1000 Prodrug 5 Time 500 0 0 0 50 100 150 200 250 1000 0.15 Time Drug 500 0.1 0.05 0 0 50 100 150 200 250 Distance from centre Macrophage therapy controls tumour growth
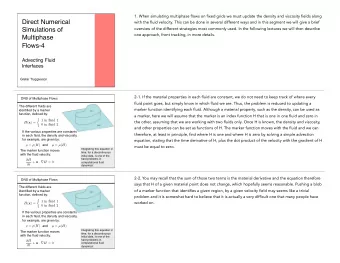
Lecture 1 Lecture 2 Lecture 3 Lecture 4 Bifurcation Diagram 0.9 4 10 0.8 0.25 0.7 Tumour cell volume fraction 3 10 Saturation size, R ∞ 0.6 Wave speed, U 0.2 φ ∞ =0.2 φ ∞ =0.15 φ ∞ =0.1 0.5 0.15 0.4 2 10 0.1 0.3 0.2 0.05 1 10 0.1 0 0 0.05 0.1 0.15 0.2 0.25 0.3 0 Surface prodrug ( φ ∞ ) 0 20 40 60 80 100 Distance from centre System evolves to steady travelling wave when pro-drug levels are low System evolves to steady state when pro-drug levels high (tumour control)
Lecture 1 Lecture 2 Lecture 3 Lecture 4 Bifurcation Diagram 60 3 1 10 0.9 50 0.8 Spheroid radius, R 0.7 Saturation size, R ∞ 40 Wave speed, U 2 0.6 10 30 0.5 0.4 20 0.3 1 0.2 10 10 0.1 0 0 0.14 0.16 0.18 0.2 0.22 0.24 Surface prodrug ( φ ∞ ) 0 20 40 60 80 100 Time, t In certain parameter regimes we observe co-existence of travelling waves and steady state solutions
Lecture 1 Lecture 2 Lecture 3 Lecture 4 Next Steps with Macrophages • Combination therapies (e.g. macrophage-therapy and radiotherapy) • Distinguish different macrophage phenotypes (M1,M2, etc) • Understand/explain why distributions of macrophages in different tumours vary
Lecture 1 Lecture 2 Lecture 3 Lecture 4 Modelling Combination Therapy • 3-phase mixture model (tumour cells, macrophages and fluid) • apply single dose of radiotherapy at t=150 • introduce macrophage-based virotherapy at t=200 • decompose tumour population into uninfected and infected tumour cells
Lecture 1 Lecture 2 Lecture 3 Lecture 4 Modelling Combination Therapy • Treatment protocol influences outcome
Lecture 1 Lecture 2 Lecture 3 Lecture 4 Modelling Combination Therapy • Coordination of RT and virotherapy influences outcome
Lecture 1 Lecture 2 Lecture 3 Lecture 4 Critique of Basic Model Recall that biological tissues are complex and heterogeneous How can we relax following assumptions in our simple PDE model? • Heterogeneity • In vivo tissues comprise ECM, immune cells, blood vessels, and fluid • Geometry: 1D → 2 D , 3 D • Tumours are often invasive, spreading in 2D and 3D • Mechanics: • Tumour cells may be mechanosensitive
Lecture 1 Lecture 2 Lecture 3 Lecture 4 2D Model Velocity v = ( v , w ) ∂ n ∂ t + ∂ ∂ x ( vn ) + ∂ ∂ y ( wn ) = S ( c , n ) � ∂ 2 c � ∂ x 2 + ∂ 2 c 0 = D − F ( c , n ) ∂ y 2 d Γ dt = v . ˆ (ˆ n n = unit outward normal ) Option 1: cells move by random motion v = − µ ∇ n : diffusion equation for n Option 2: ’no voids’ ( n = 1) ⇒ not enough information to close problem! Possible closures: introduce cell pressure, p ( x , y , t ) Darcy’s law: v = − k ∇ p µ ∇ 2 v − ∇ p = 0 Stoke’s flow:
Lecture 1 Lecture 2 Lecture 3 Lecture 4 Darcy’s Law and ’No Voids’ ∇ . v = S ( c , 1 ) = ˜ − k ∇ 2 p = ˜ S ( c ) and v = − k ∇ p ⇒ S ( c ) Model becomes 0 = D ∇ 2 c − ˜ − k ∇ 2 p = ˜ F ( c ) S ( c ) and d Γ n = − k ∂ p dt = v . ˆ ∂ n with Γ( x , y , t ) = 0 = x − R ( y , t ) . Boundary and initial conditions ∂ c ∂ x = 0 = ∂ p ∂ x at x = 0 c = c ∞ p = p ∞ on x = R ( y , t ) R ( y , 0 ) = R 0 ( y ) prescribed • Darcy: Greenspan (1976); HMB and Chaplain (1997); HMB (1997). • Stokes flow: Franks et al (2003)
Lecture 1 Lecture 2 Lecture 3 Lecture 4 Symmetry Breaking and Tumour Invasion • Calculate radially symmetric steady state solution • Linearise about steady state to determine stability to symmetry-breaking perturbations (HMB and Chaplain, 1997) • Can perform weakly nonlinear analysis to characterise bifurcations but the algebra is very messy (see: Byrne, 1999) • Happy to share details if there is interest
Lecture 1 Lecture 2 Lecture 3 Lecture 4 Critique of Basic Model Recall that biological tissues are complex and heterogeneous How can we relax following assumptions in our simple PDE model? • Heterogeneity • In vivo tissues comprise ECM, immune cells, blood vessels, and fluid • Geometry: 1D → 2 D , 3 D • Tumours are often invasive, spreading in 2D and 3D • Mechanics: • Tumour cells may be mechanosensitive
Lecture 1 Lecture 2 Lecture 3 Lecture 4 Mechanotransduction Spheroid size influenced by stiffness of gel in which it is cultured
Lecture 1 Lecture 2 Lecture 3 Lecture 4 General model framework (1D) • View tumour as mixture of cells ( n ) and water ( w ) • Mass balances for n and w : ∂ n ∂ t + ∂ ∂ w ∂ t + ∂ ∂ x ( nv n ) = S n , ∂ x ( wv w ) = − S n • Momentum balances for v n and v w : ∂ x ( n σ n )+ knw ( v w − v n )+ p ∂ n ∂ ∂ x = 0 = ∂ ∂ x ( w σ w ) − knw ( v w − v n )+ p ∂ w ∂ x • No voids condition (for pressure, p ): n + w = 1 • Close model by specifying S n , σ n and σ w
Lecture 1 Lecture 2 Lecture 3 Lecture 4 General model framework • Assume n and w are isotropic fluids: σ n = − p n , σ w = − p w ≡ − p • Additional constitutive assumption needed to specify p n : 1. cells ∼ bags of water: p n = p + Σ( n ) n = n ∗ , constant 2. cells ∼ incompressible: Sketch of Σ( φ ) . Schematic of cell and fluid movt. • Conservation of total mass and momentum supplies: nv n + wv w = 0 = ∂ ∂ x ( n σ n + w σ w )
Lecture 1 Lecture 2 Lecture 3 Lecture 4 General model framework • Assume n and w are isotropic fluids: σ n = − p n , σ w = − p w ≡ − p • Additional constitutive assumption needed to specify p n : 1. cells ∼ bags of water: p n = p + Σ( n ) n = n ∗ , constant 2. cells ∼ incompressible: Sketch of Σ( φ ) . Schematic of cell and fluid movt. • Conservation of total mass and momentum supplies: nv n + wv w = 0 = ∂ ∂ x ( n σ n + w σ w )
Lecture 1 Lecture 2 Lecture 3 Lecture 4 General model framework • Assume n and w are isotropic fluids: σ n = − p n , σ w = − p w ≡ − p • Additional constitutive assumption needed to specify p n : 1. cells ∼ bags of water: p n = p + Σ( n ) n = n ∗ , constant 2. cells ∼ incompressible: Sketch of Σ( φ ) . Schematic of cell and fluid movt. • Conservation of total mass and momentum supplies: nv n + wv w = 0 = ∂ ∂ x ( n σ n + w σ w )
Lecture 1 Lecture 2 Lecture 3 Lecture 4 Model simplifications I. p n = p + Σ( n ) . � � ⇒ ∂ n ∂ t = 1 ∂ ( 1 − n ) ∂ ∂ x ( n Σ( n )) + S n k ∂ x i.e. Nonlinear diffusion equation for n with Darcy’s law for fluid motion so that v w = − 1 k p x (cf. Breward et al, 2002; Byrne et al, 2003) II. n = n ∗ , constant. ∂ 2 p n ∂ v n ∂ x = S n and v n = − 1 ∂ p n ⇒ − 1 ∂ x 2 = S n ( Laplace’s Eqn. ) k ∂ x k Assume outer tumour boundary ( x = R ( t ) ) moves with cell velocity � R dR dt = v n | x = R ( t ) = S n dx 0 (cf. Greenspan, 1972) Retain p n to allow S n = S n ( p n )
Lecture 1 Lecture 2 Lecture 3 Lecture 4 Model simplifications I. p n = p + Σ( n ) . � � ⇒ ∂ n ∂ t = 1 ∂ ( 1 − n ) ∂ ∂ x ( n Σ( n )) + S n k ∂ x i.e. Nonlinear diffusion equation for n with Darcy’s law for fluid motion so that v w = − 1 k p x (cf. Breward et al, 2002; Byrne et al, 2003) II. n = n ∗ , constant. ∂ 2 p n ∂ v n ∂ x = S n and v n = − 1 ∂ p n ⇒ − 1 ∂ x 2 = S n ( Laplace’s Eqn. ) k ∂ x k Assume outer tumour boundary ( x = R ( t ) ) moves with cell velocity � R dR dt = v n | x = R ( t ) = S n dx 0 (cf. Greenspan, 1972) Retain p n to allow S n = S n ( p n )
Lecture 1 Lecture 2 Lecture 3 Lecture 4 Remarks • Structure of phenomenological models depends on underlying constitutive assumptions • Multiphase framework allows more general constitutive assumptions (eg viscous or elastic effects) and investigation of biomechanical effects • Can use multiphase framework to study problems in e.g. tissue engineering
Lecture 1 Lecture 2 Lecture 3 Lecture 4 Applications/Extensions • Including chemotaxis within multiphase framework • Constrained growth (mechanotransduction) • Ductal carcinoma in situ • Tumour encapsulation • Growth of spheroids embedded in gels
Lecture 1 Lecture 2 Lecture 3 Lecture 4 Outline of Lectures • Lecture 1 : preliminaries • Lecture 2 : two-phase models • Lecture 3 : multiphase models • Lecture 4 : current work and open problems
Lecture 1 Lecture 2 Lecture 3 Lecture 4 Lecture 3 Choose two of these applications • Tumour encapsulation • Chemotaxis in a multiphase framework • Model development • Application: going against the flow (with chemotaxis) • Mechanical inhibition of spheroid growth
Lecture 1 Lecture 2 Lecture 3 Lecture 4 Tumour Encapsulation Modelling approach: • Develop three-phase model for tumour cells ( n ), extracellular fluid ( w ) and ECM ( m ) Jackson and Byrne, Math Biosci (2002)
Lecture 1 Lecture 2 Lecture 3 Lecture 4 Governing Equations Mass Balance Equations n t + ( nv n ) x = S n , m t + ( mv m ) x = S m , w t + ( wv w ) x = S w . No-Voids Assumption n + m + w = 1 . Momentum Balance Equations ( n σ n ) x + F nm + F nw + pn x = 0 , ( m σ m ) x − F nm + F mw + pm x = 0 , ( w σ w ) x − F nw − F mw + pw x = 0 , where F ij = knm ( v j − v i ) , and σ n = − ( p + Σ n ) , σ m = − ( p + Σ m ) , σ w = − p .
Lecture 1 Lecture 2 Lecture 3 Lecture 4 Governing Equations Constitutive Assumptions S n = α n nw − δ n and S m = α m nmw Σ n = s n n and Σ m = s m m ( 1 + θ n ) . Note: • Pressures in tumour and ECM phases increase with their densities • Tumour cells cause additional increase in ECM pressure ( θ > 0) • ECM only produced if tumour cells present After some (!) algebra, possible to derive reduced model for n and m : � � � � ∂ n ∂ t = n ( 1 − n − m ) − δ n + 2 β n ∂ n ( 1 − n ) ∂ n − β m ∂ n ∂ ∂ x ( m 2 ( 1 + θ n )) , ∂ x ∂ x ∂ x � � � � ∂ m ∂ t = α mn ( 1 − n − m )+ β m ∂ ( 1 − m ) ∂ − 2 β n ∂ mn ∂ n ∂ x ( m 2 ( 1 + θ n )) , ∂ x ∂ x ∂ x s n α n kL 2 , α = α m s m α n , δ = δ n where β n = α n kL 2 , β m = α n .
Lecture 1 Lecture 2 Lecture 3 Lecture 4 Tumour Encapsulation Simulation results showing how system evolves when active and passive responses are active ( α, θ > 0)
Lecture 1 Lecture 2 Lecture 3 Lecture 4 Simulation Results Simulation results showing how system evolves when only the passive response is active ( α = 0 , θ > 0)
Lecture 1 Lecture 2 Lecture 3 Lecture 4 Simulations Results Simulation results showing how the capsule width changes over time when only a passive response is active, and β n varies.
Lecture 1 Lecture 2 Lecture 3 Lecture 4 Simulation Results Simulation results showing how system evolves when only an active response is active ( α > 0 , θ = 0).
Lecture 1 Lecture 2 Lecture 3 Lecture 4 Simulation Results Simulation results showing how protease production may lead to the destruction of the collagen capsule and, thereby, enhance tumour invasion. Tumour cells produce ECM-degrading protease when the pressure they experience exceeds a threshold value.
Lecture 1 Lecture 2 Lecture 3 Lecture 4 The Patlak-Keller-Segel Equations for Chemotaxis � � � � ∂ n ∂ t = ∂ µ ( n , a ) ∂ n − ∂ χ ( n , a ) n ∂ a + f ( n , a ) ∂ x ∂ x ∂ x ∂ x ∂ t = ∂ 2 a ∂ a ∂ x 2 + g ( n , a ) Question: • Can we derive PKS equations using multiphase framework? Ref: Owen and Byrne (2004), J Math Biol
Lecture 1 Lecture 2 Lecture 3 Lecture 4 Mass Balance Equations n t + ( v n n ) x = S n ( n , w , a ) w t + ( v w w ) x = − S n ( n , w , a ) a t + ( av w ) x = D a a xx + S a ( a , n ) Note: a distributed in fluid phase No voids n + w = 1 Momentum Balance Equations 0 = ( n σ n ) x + F nw + pn x 0 = ( w σ w ) x − F nw + pw x
Lecture 1 Lecture 2 Lecture 3 Lecture 4 Constitutive Equations σ n = − p − Λ( n , a ) and σ w = − p Overall system momentum balance supplies 0 = ( p + n Λ) x ⇒ p = − n Λ + P ( t ) While system mass balance supplies 0 = ( nv n + wv w ) x ⇒ nv n + wv w = 0 With F nw = k ( n )( v w − v n ) , momentum balance for fluid supplies 0 = − wp x + k ( n )( v n − v w )
Lecture 1 Lecture 2 Lecture 3 Lecture 4 0 = − wp x + k ( n )( v n − v w ) Substitute for p = − n Λ + P ( t ) and v w = nv n / ( 1 − n ) to get v n = − ( 1 − n ) 2 ( n Λ) x k ( n ) � � � � ⇒ ∂ n ∂ t = ∂ µ ( n , a ) ∂ n − ∂ χ ( n , a ) n ∂ a + f ( n , a ) ∂ x ∂ x ∂ x ∂ x where µ ( n , a ) = n ( 1 − n ) 2 χ ( n , a ) = − n ( 1 − n ) 2 ∂ ∂ Λ ∂ n ( n Λ) and k ( n ) k ( n ) ∂ a
Lecture 1 Lecture 2 Lecture 3 Lecture 4 Comment 1: v w = − nv n 1 − n ⇒ cells and water move in opposite directions Comment 2: ∂ Λ ∂ a < 0 ⇒ pressure in cell phase relieved when cells move up chemical gradients Comment 3: chemokinesis ∂ Λ ∂ a � = 0 ⇒ chemical stimulates chemotaxis ( χ = χ ( n , a )) and regulates random motion ( µ = µ ( n , a ) Comment 4: Λ + n Λ n < 0 ⇒ ill-posedness
Lecture 1 Lecture 2 Lecture 3 Lecture 4 Linear Stability Analysis • Neglect cell proliferation and death • assume cells respond to concentration of chemical in the water, a / w : S n = 0 , S a = n − s 1 a , Λ = Λ( a / w ) = α 1 + β 1 e − θ 1 a / w = α 1 + β 1 e − θ 1 a / ( 1 − n ) � n ( 1 − n ) 2 � n t = ( n Λ) x k ( n ) x � an ( 1 − n ) � a t + ( n Λ) x = D a a xx + n − s 1 a k ( n ) x We linearise about the spatially uniform steady state a = n 0 n = n 0 + ǫ n 1 e i λ x + σ t + ǫ a 1 e i λ x + σ t and ( 0 ≪ ǫ ) s 1
Lecture 1 Lecture 2 Lecture 3 Lecture 4 Pattern formation if ℜ ( σ ( λ )) > 0 if � � � � α 1 θ 1 n 0 1 + 4 s 1 e − θ 1 n 0 / s 1 ( 1 − n 0 ) ≤ e − 2 < s 1 ( 1 − n 0 ) 2 − 1 β 1 θ 1 Comment 1: � � α 1 1 + 4 s 1 > e − 2 ⇒ no patterns β 1 θ 1 Comment 2: � � α 1 1 + 4 s 1 < e − 2 ⇒ patterns for n 0 ∈ ( n − , n + ) β 1 θ 1 where n ± solve � � α 1 θ 1 n 0 e − θ 1 n 0 / s 1 ( 1 − n 0 ) = s 1 ( 1 − n 0 ) 2 − 1 β 1
Lecture 1 Lecture 2 Lecture 3 Lecture 4 Analytical Results
Lecture 1 Lecture 2 Lecture 3 Lecture 4 Analytical Results
Lecture 1 Lecture 2 Lecture 3 Lecture 4 Interstitial Flow Biases Cell Migration Experimental set-up Interstitial flow biases cell migration Experimental results against the direction of flow WJ Polacheck et al., PNAS (2011)
Lecture 1 Lecture 2 Lecture 3 Lecture 4 Interstitial Flow Biases Cell Migration Aim • Identify mechanisms by which flow may enhance cell aggregation • Are experimental results consistent with cells producing chemoattractant • At a constant rate? • At a rate which depends on drag experienced by cells? Acknowledgements: CG Bell, JP Whiteley, SL Waters
Lecture 1 Lecture 2 Lecture 3 Lecture 4 Model Development Schematic diagram of experimental set up
Lecture 1 Lecture 2 Lecture 3 Lecture 4 Model Development Assumptions • Two-phase mixture model for fluid and cells • Mass and momentum balances to determine • Cell and fluid volume fraction ( θ n , θ w ) • Cell and fluid velocities ( u w , u n ) • Cells produce chemoattractant which degrades, diffuses and is advected with the flow • Neglect cell proliferation • Additional constitutive assumptions to close model
Lecture 1 Lecture 2 Lecture 3 Lecture 4 Mass balance equations ∂θ n ∂θ w ∂ t + ∇ . ( θ n u n ) = 0 , + ∇ . ( θ n u w ) = 0 ∂ t Momentum balance equations 0 = ∇ . ( θ n σ n ) + F nw + F ns + p ∇ θ n , = ∇ . ( θ w σ w ) − F nw + F ws + p ∇ θ w , 0 where σ n = − P n = − ( P + D n ˜ ψ ( θ n ) − γ ˜ χ ( c ) and σ w = − P . Note: scaffold static but exerts drag force on cells and fluid
Lecture 1 Lecture 2 Lecture 3 Lecture 4 Mass balance equations ∂θ n ∂θ w ∂ t + ∇ . ( θ n u n ) = 0 , + ∇ . ( θ n u w ) = 0 ∂ t Momentum balance equations 0 = − θ n ∇ P D n ∇ ψ ( θ n ) + γχ ( c ) θ n ∇ c − � �� � � �� � � �� � Mixture pressure Cell pressure Chemotactic force − β wn θ n θ w ( u n − u w ) β ns θ s θ n u n − � �� � � �� � Cell-scaffold drag Fluid-cell drag 0 = − θ w ∇ P + β wn θ n θ w ( u n − u w ) − β ws θ s θ w u w � �� � � �� � � �� � Mixture pressure Fluid-cell drag Fluid-scaffold drag ψ ( θ n ) − γ ˜ ˜ Note: P n = P + D n χ ( c )
Lecture 1 Lecture 2 Lecture 3 Lecture 4 Chemoattractant ∂ ( θ w c ) + ∇ . ( θ w u w c ) = D ∇ . ( θ w ∇ c ) + κθ n θ w − λθ w c ∂ t Constitutive Assumptions θ n + θ w = 1 Approach • 1D, pressure-driven fluid flow across cells • Perform linear stability analysis of spatially-uniform steady state � 1 − x � + ǫ P 1 e iqx + σ t , c = κθ 0 θ n = θ 0 + ǫθ 1 e iqx + σ t , P = P u + ǫ c 1 e iqx + σ t L λ • Identify conditions under which flow enhances cell aggregation • Compare linear stability analysis with numerical solutions of full model
Lecture 1 Lecture 2 Lecture 3 Lecture 4 Results (Linear Stability Analysis) Flow inhibits cell aggregation when cells produce chemoattractant at a constant rate.
Lecture 1 Lecture 2 Lecture 3 Lecture 4 Results (Linear Stability Analysis) Flow enhances cell aggregation when chemoattractant production is drag-dependent. Production is increasing saturating function of absolute value of drag force between cells and fluid.
Lecture 1 Lecture 2 Lecture 3 Lecture 4 Applications of Multiphase Modelling • Including chemotaxis within multiphase framework • Constrained growth (mechanotransduction) • Ductal carcinoma in situ • Tumour encapsulation • Growth of spheroids embedded in gels
Lecture 1 Lecture 2 Lecture 3 Lecture 4 Model Development • Tumour ≡ 2-phase mixture: cells ( φ ) and water (1 − φ ) • Tumour embedded in deformable gel Mass Balance Equations φ t + ∇ . ( φ U c ) = φ S ( c ) ( 1 − φ ) t + ∇ . [( 1 − φ ) U e ] = − φ S ( c ) Note: no voids assumption implicit in these equations Momentum Balance Equations 0 = ∇ . ( φσ c ) − 1 k φ ( U c − U e ) + P e ∇ φ 0 = ∇ . (( 1 − φ ) σ e ) + 1 k φ ( U c − U e ) + P e ∇ ( 1 − φ ) where σ c = − ( P e + 1 φ P c ) and σ e = − P e
Lecture 1 Lecture 2 Lecture 3 Lecture 4 Model Development Mass Balance Equations φ t + ∇ . ( φ U c ) = φ S ( c ) ( 1 − φ ) t + ∇ . [( 1 − φ ) U e ] = − φ S ( c ) Momentum Balance Equations (Landman and Please, 2000) − 1 k φ ( U c − U e ) φ ∇ P e ∇ P c = 0 − − ���� � �� � � �� � intercell. pressure hydrostatic pressure drag 1 k φ ( U c − U e ) + φ ∇ P e − ∇ P e = 0 Sum mass and momentum balance equations φ U c = − ( 1 − φ ) U e and P c = − P e + p ( t )
Lecture 1 Lecture 2 Lecture 3 Lecture 4 Eliminate P e and U e from cell momentum balance ⇒ U c = − k ( 1 − φ ) 2 ∇ P c φ Assume cells compacted in viable region P c > P e and φ = φ 0 Assume cells not compacted in necrotic core P c = P e and 0 < φ < φ 0 ⇒ P c − P e ≥ 0 , φ 0 − φ ≥ 0 , ( P c − P e )( φ 0 − φ ) = 0 . Note: Analogy with models of fluidised beds Assume radial symmetry, with r = X ( t ) = outer tumour radius r = L ( t ) = interface between necrotic and compacted regions
Lecture 1 Lecture 2 Lecture 3 Lecture 4 Model Summary Compacted/viable region ( L ( t ) < r < X ( t ) ) 0 = 1 r 2 ( r 2 C r ) r − S ( c ) , φ = 1 r 2 ( r 2 U c ) r = − 1 1 r 2 ( r 2 P cr ) r = H ( C − α ) − ρ H ( α − C ) Necrotic region (0 < r < L ( t ) ) 0 = 1 r 2 ( r 2 C r ) r − φ S ( c ) , φ t = φ [ H ( C − α ) − ρ H ( α − C )] , P c = p 0 ( t ) , U c = 0 Boundary and continuity conditions U c = − P cr = C r = 0 on r = 0 C = 1 , P c = p ( t ) = Γ X − σ rr ( X , t ) , P e = 0 , dX dt = U c on r = X ( t ) . [ C ] + − = [ C r ] = [ φ ] = [ U c ] = [ P cr ] = 0 across r = L ( t )
Lecture 1 Lecture 2 Lecture 3 Lecture 4 Exponential Growth Phase Non-necrotic growth ( L = 0 , S ( C ) = 1) C = 1 − 1 6 ( X 2 − r 2 ) U c = r 3 , X ( t ) = X 0 e t / 3 , P c = Γ X − σ rr ( X , t ) − 1 6 ( X 2 − r 2 ) Comments: • Stress in gel does not affect growth during this stage of exponential growth • Stress will affect growth when necrosis is initiated • Model breaks down at t = t 1 when � C min = C ( 0 , t 1 ) = α ⇔ X = X ( t 1 ) = 6 ( 1 − α )
Lecture 1 Lecture 2 Lecture 3 Lecture 4 Sub-exponential, Non-necrotic Growth Phase Suppose C = α on r = r c ( t ) where 0 < r c ( t ) < X ( t ) . Then, 3 X 2 dX dt = X 3 − ( 1 + ρ ) r 3 c = X 2 − 6 ( 1 − α ) r 2 and c ( 1 + ρ ) 2 / 3 ⇒ X → X ∞ = 6 ( 1 − α ) ( 1 + ρ ) 2 / 3 − 1 as t → ∞ Solution valid if P c > P e ∀ r ∈ ( 0 , X ) � Γ � r 3 ⇔ − 1 6 ( 2 + 3 ρ ) X 2 + 3 ( 1 + ρ )( 1 − α ) + ( 1 + ρ ) X 2 + 1 c X − σ rr ( X , t ) > 0 3 2 Constraint depends on stress in gel (also require C > 0) Can repeat analysis for growth with necrotic core but algebra more involved Question: What happens in the gel?
Lecture 1 Lecture 2 Lecture 3 Lecture 4 Steady States and Travelling Waves
Lecture 1 Lecture 2 Lecture 3 Lecture 4 Aside: Elasticity Theory Let X i = reference coordinate of a particle and x i = spatial coordinate (deformed frame). Then F i , j = ∂ x i ≡ deformation gradient tensor ∂ X j B = F . F T ≡ Cauchy-Green deformation tensor The (stress or) strain invariants I 1 , I 2 and I 3 are intrinsic properties of the (stress or) strain tensor, regardless of the frame of reference. They are the coefficients of the characteristic equation that defines the eigenvalues of the (stress or) strain tensor. For example, I 1 = tr ( B ) , I 2 = ( tr B ) 2 − tr ( B 2 ) , I 3 = det ( B ) . The strain energy function W relates the strain energy density to the deformation gradient
Lecture 1 Lecture 2 Lecture 3 Lecture 4 We define a strain energy function + γ (¯ I 3 − 1 ) 2 � � e β (¯ I 1 − 3 ) − 1 W = η (¯ I 3 − δ ) n where ¯ I 1 = I − 1 / 2 I 1 , ¯ I 2 = I − 2 / 3 I 2 , ¯ I 3 = I 3 . 3 3 I 1 = tr ( B ) , I 2 = ( tr B ) 2 − tr ( B 2 ) , I 3 = det ( B ) . Comment 1: no stress at no displacement Comment 2: For isotropic, hyperelastic material, W = W ( I 1 , I 2 ) and � � 2 ∂ W I + ∂ W √ I 3 σ = I 3 B ∂ I 3 ∂ I 1 Neglecting inertial terms, the equations of motion are ∇ .σ = 0
Lecture 1 Lecture 2 Lecture 3 Lecture 4 Radial Symmetry and Small Displacements We denote by r and R the spatial and reference coordinates. Then ∂ r 0 0 σ rr 0 0 ∂ R , σ = r F = 0 0 0 σ θθ 0 R r 0 0 0 0 σ φφ R where � ∂ r � 2 ∂ W 2 ∂ W � √ I 3 σ rr = 2 I 3 + , ∂ I 3 ∂ I 1 ∂ R � r � 2 ∂ W 2 ∂ W � √ I 3 σ θθ = σ φφ = 2 I 3 + , ∂ I 3 ∂ I 1 R and the equations of motion ( ∇ .σ = 0) supply ∂σ rr + 2 r ( σ rr − σ θθ ) = 0 and σ θθ = σ φφ ∂ r
Lecture 1 Lecture 2 Lecture 3 Lecture 4 For small displacements, u = r − R ≃ ǫ u 0 ≪ 1 ⇒ ∂ r ∂ R = 1 + ∂ u ∂ R ≃ 1 + ǫ∂ u 0 ∂ R � ∂ u 0 � � ∂ u 0 � ∂ R + 2 u 0 ∂ R + 2 u 0 I 1 ≈ 3 + 2 ǫ and I 3 ≈ 1 + 2 ǫ R R and, after some algebra, � ∂ u 0 � � ∂ u 0 � σ rr ≃ 8 ηβ ∂ R − u 0 8 γ ∂ R + 2 u 0 + 3 R ( 1 − δ ) n R � ∂ u 0 � � ∂ u 0 � σ θθ ≃ − 4 ηβ ∂ R − u 0 8 γ ∂ R + 2 u 0 + 3 R ( 1 − δ ) n R
Lecture 1 Lecture 2 Lecture 3 Lecture 4 Finally, the equations of motion supply � ∂ u 0 � ∂ 2 u 0 ∂ R 2 + 2 ∂ R − u 0 = 0 R R with u 0 → 0 as R → ∞ and u 0 = 1 on R = X 0 (i.e. on the tumour boundary) ⇒ u 0 = X 2 σ rr ( X 0 , t ) ≃ − 8 ηβ X 2 0 0 and R 2 R 3
Recommend













More recommend
Explore More Topics
Stay informed with curated content and fresh updates.