Motion Planning for Example Finding Evasive Targets in a Cluttered - PDF document
Motion Planning for Example Finding Evasive Targets in a Cluttered Environment cleared region robot robots visibility region + hidin hiding region 1 2 3 Map Building 4 5 6 1 2 Problem Assumptions Target is unpredictable
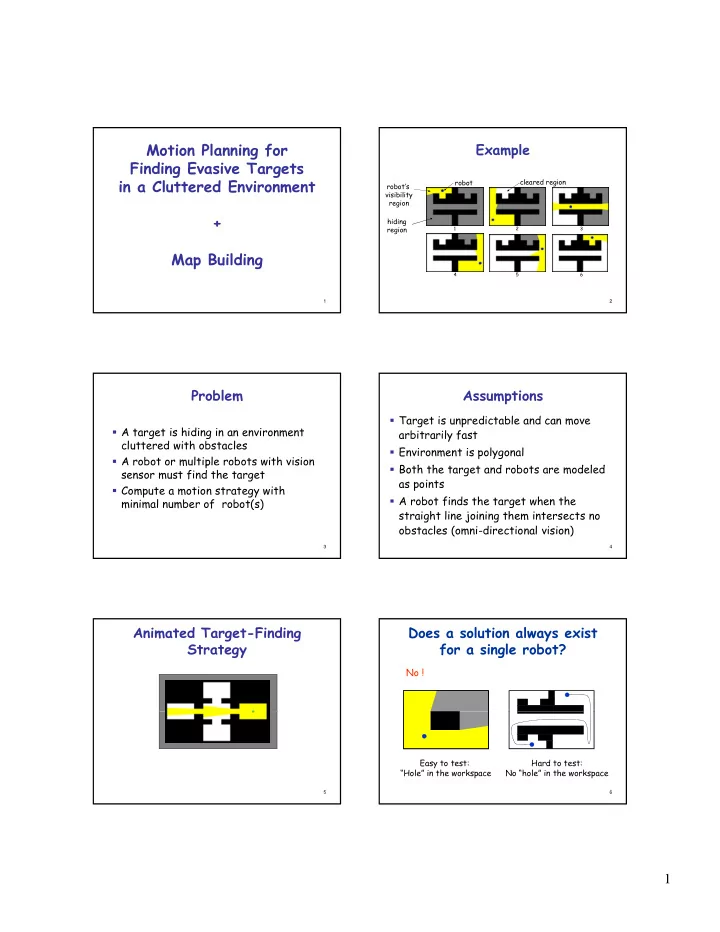
Motion Planning for Example Finding Evasive Targets in a Cluttered Environment cleared region robot robot’s visibility region + hidin hiding region 1 2 3 Map Building 4 5 6 1 2 Problem Assumptions � Target is unpredictable and can move � A target is hiding in an environment arbitrarily fast cluttered with obstacles � Environment is polygonal � A robot or multiple robots with vision m p � Both the target and robots are modeled B th th t t d b t d l d sensor must find the target as points � Compute a motion strategy with � A robot finds the target when the minimal number of robot(s) straight line joining them intersects no obstacles (omni-directional vision) 3 4 Animated Target-Finding Does a solution always exist Strategy for a single robot? No ! Easy to test: Hard to test: “Hole” in the workspace No “hole” in the workspace 5 6 1
Effect of Geometry on the Effect of Number n of Edges Number of Robots Minimal number of robots N = Θ (log n) Two robots are needed 7 8 Information State Effect of Number h of Holes visibility region a = 0 or 1 c = 0 or 1 b = 0 or 1 free edge obstacle edge N= Θ ( h) (x,y) (x ) 0 � cleared region 1 � contaminated region � Example of an information state = (x,y,a=1,b=1,c=0) � An initial state is of the form (x,y,a=1,b=1,...,u=1) � A goal state is any state of the form (x,y,a=0,b=0,..., u=0) 9 10 Critical Line Grid-Based Discretization contaminated area b=1 a=0 (x,y,a=0,b=1) ( ,y,a , ) cleared area b=1 b=0 � Ignores critical lines � Visits many “equivalent” states a=0 a=0 � Many information states per grid point � Potentially very inefficient Information state is unchanged Critical line (x,y,a=0,b=1) (x,y,a=0,b=0) 11 12 2
Discretization into Conservative Cells Discretization into Conservative Cells In each conservative cell, the “topology” of the visibility In each conservative cell, the “topology” of the visibility region remains constant, i.e., the robot keeps seeing the region remains constant, i.e., the robot keeps seeing the same obstacle edges same obstacle edges 13 14 Discretization into Conservative Cells In each conservative cell, the “topology” of the visibility region remains constant, i.e., the robot keeps seeing the same obstacle edges 15 16 Search Graph Example � {Nodes} = {Conservative Cells } X {Information States} (C,a=1,b=1) � Node ( c , i ) is connected to (c’, i’ ) iff: • Cells c and c’ share an edge (i.e., are adjacent) • Moving from c , with state i , into c’ yields state i’ A (B,b=1) (D,a=1) � Initial node ( c , i ) is such that: Initial node ( c , i ) is such that • c is the cell where the robot is initially located E a b • i = (1, 1, …, 1) B C D � Goal node is any node where the information state is (0, 0, …, 0) � Size is exponential in the number of edges 17 18 3
Example Example (C,a=1,b=1) (C,a=1,b=1) A A (B,b=1) (D,a=1) (B,b=1) (D,a=1) E E B C D B C D (C,a=1,b=0) (E,a=1) (C,a=1,b=0) (E,a=1) (B,b=0) (D,a=1) 19 20 Example of Target-Finding Strategy Example (C,a=1,b=1) A (B,b=1) (D,a=1) E B C D (C,a=1,b=0) (E,a=1) Visible Cleared Much smaller search tree than Contaminated (B,b=0) (D,a=1) with grid-based discretization ! 21 22 More Complex Example Example with Recontaminations 3 1 2 2 6 4 5 1 3 23 24 4
Example with Linear Number Example with Two Robots of Recontaminations (Greedy algorithm) Recontaminated area 1 2 3 4 25 26 Example with Two Robots Example with Three Robots 27 28 Robot with Cone of Vision Other Topics � Dimensioned targets and robots, three- dimensional environments � Non-guaranteed strategies � Concurrent model construction and C t d l t ti d target finding � Planning the escape strategy of the target 29 30 5
Map Building Sensing Laser range finder 31 32 Alignment of Contours Merging of Four Partial Models 33 34 Dealing with Uncertainty Next-Best View Planning 1. Simultaneous Localization and Mapping (SLAM) 2. Next-Best View (NBV) Planning 35 36 6
NBV Example 1 NBV Example 2 37 38 Map Building with NBV 3D Mapping 39 40 7
Recommend

















More recommend
Explore More Topics
Stay informed with curated content and fresh updates.