Modelling the world Knowledge, Mission Data Base Commands - PowerPoint PPT Presentation
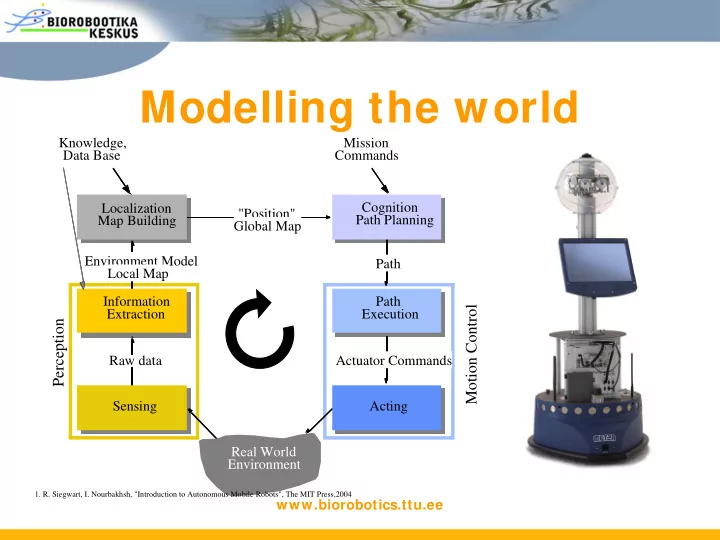
Modelling the world Knowledge, Mission Data Base Commands Cognition Localization "Position" Path Planning Map Building Global Map Environment Model Path Local Map Information Path Motion Control Extraction Execution
Modelling the world Knowledge, Mission Data Base Commands Cognition Localization "Position" Path Planning Map Building Global Map Environment Model Path Local Map Information Path Motion Control Extraction Execution Perception Raw data Actuator Commands Sensing Acting Real World Environment 1. R. Siegwart, I. Nourbakhsh, "Introduction to Autonomous Mobile Robots", The MIT Press,2004 www.biorobotics.ttu.ee
World models • Represent the environment. The models have to be: • Compact to be used efficiently • Adapted to the task and the enviromment • Usable in case of sensor and position uncertainty www.biorobotics.ttu.ee
5.5 Representation of the Environment → x,y, θ – Continuos Metric → metric grid – Discrete Metric → topological grid – Discrete Topological www.biorobotics.ttu.ee
5.5 Environment modelling • Raw sensor data, e.g. laser range data, grayscale images – large volume of data, low distinctiveness on the level of individual values – makes use of all acquired information • Low level features, e.g. line other geometric features – medium volume of data, average distinctiveness – filters out the useful information, still ambiguities • High level features, e.g. doors, a car, the Eiffel tower – low volume of data, high distinctiveness – filters out the useful information, few/no ambiguities, not enough information www.biorobotics.ttu.ee
5.5 Representation of the Environment • Environment Representation → x,y, θ – Continuos Metric → metric grid – Discrete Metric → topological grid – Discrete Topological www.biorobotics.ttu.ee
Topological maps ~ 400 m ~ 1 km ~ 200 m ~ 50 m ~ 10 m 1. R. Siegwart, I. Nourbakhsh, "Introduction to Autonomous Mobile Robots", The MIT Press,2004 www.biorobotics.ttu.ee
Topological decomposition 1. R. Siegwart, I. Nourbakhsh, "Introduction to Autonomous Mobile Robots", The MIT Press,2004 www.biorobotics.ttu.ee
Topological decomposition 1. R. Siegwart, I. Nourbakhsh, "Introduction to Autonomous Mobile Robots", The MIT Press,2004 www.biorobotics.ttu.ee
Exact cell decomposition 1. R. Siegwart, I. Nourbakhsh, "Introduction to Autonomous Mobile Robots", The MIT Press,2004 www.biorobotics.ttu.ee
Voronoi diagrams • Sets of points which are equidistant from object boundaries • Following the lines keeps the robot possibly far from object boundaries www.biorobotics.ttu.ee
Voronoi diagrams • http://www.cs.columbia.edu/~pblaer/project s/path_planner/ www.biorobotics.ttu.ee
Grid maps 1. R. Siegwart, I. Nourbakhsh, "Introduction to Autonomous Mobile Robots", The MIT Press,2004 www.biorobotics.ttu.ee
Adaptive grid maps 1. R. Siegwart, I. Nourbakhsh, "Introduction to Autonomous Mobile Robots", The MIT Press,2004 www.biorobotics.ttu.ee
Quatrees www.biorobotics.ttu.ee
Hybrid maps Pär Buschka and Alessandro Saffiotti, “Some Notes on the Use of Hybrid Maps for Mobile Robots”, Proc. of the 8th Int. Conf. on Intelligent Autonomous Systems. Amsterdam, The Netherlands, March 2004 www.biorobotics.ttu.ee
Elevation maps www.biorobotics.ttu.ee
Why are maps innacurate? • Odometry errors. Not knowing the exact position makes map updating inacurate • Sensor noise • Sensor data interpretation www.biorobotics.ttu.ee
Odometry error propagation • Growth of Pose uncertainty for Straight Line Movement • Errors perpendicular to the direction of movement are growing much faster 1. R. Siegwart, I. Nourbakhsh, "Introduction to Autonomous Mobile Robots", The MIT Press,2004 www.biorobotics.ttu.ee
Odometry error propagation • Growth of Pose uncertainty for Movement on a Circle • Errors ellipse in does not remain perpendicular to the direction of movement 1. R. Siegwart, I. Nourbakhsh, "Introduction to Autonomous Mobile Robots", The MIT Press,2004 www.biorobotics.ttu.ee
Representing sensor uncertainty • Occupancy grid maps • Assume that the pose of the robot is known • Assume that the map is static • Generating maps from noisy and uncertain sensor measurement data www.biorobotics.ttu.ee
Occupancy grid maps • Grid-based maps • Each grid cell is assigned a probability that this grid is occupied • Can combine different sensor readings (e.g. sonar, laser rangefinder, stereo vision) • The probabilities of the cells are independent from each other www.biorobotics.ttu.ee
Occupancy grid maps Obstacle could be anywhere on the arc at distance D • The space closer than D is likely to be free. •A Useful Heuristic The shortest sonar returns are reliable. – They are likely to be perpendicular reflections. http://www.cs.utexas.edu/~kuipers/ www.biorobotics.ttu.ee
Occupancy grid maps • Use Bayes rules to update occupancy values = λ + log ( | ) log ( | ) log ( ) o A B B A o A = = λ = + log ( ( , ) | ) log ( | ( , ) log ( ( , )) o occ i j r D r D occ i j o occ i j sensor model Conditional probability that the cell i,j is occupied, given the sensor reading http://www.cs.utexas.edu/~kuipers/ www.biorobotics.ttu.ee
Occupancy grid maps www.biorobotics.ttu.ee
Home assignment • Drive around in the virtual Center of Biorobotics, passing through all rooms. • Use the map generating utility to create an occupancy grid map. www.biorobotics.ttu.ee
Recommend











More recommend
Explore More Topics
Stay informed with curated content and fresh updates.