LTI system response Daniele Carnevale Dipartimento di Ing. Civile - PowerPoint PPT Presentation
Laplace and Zeta transforms State space Forced response LTI system response Daniele Carnevale Dipartimento di Ing. Civile ed Ing. Informatica (DICII), University of Rome Tor Vergata Fondamenti di Automatica e Controlli Automatici A.A.
Laplace and Zeta transforms State space Forced response LTI system response Daniele Carnevale Dipartimento di Ing. Civile ed Ing. Informatica (DICII), University of Rome “Tor Vergata” Fondamenti di Automatica e Controlli Automatici A.A. 2014-2015 1 / 15
Laplace and Zeta transforms Differential equations State space Difference equations Forced response Laplace and Zeta transforms Recalling Laplace and Zeta transforms � + ∞ f ( t ) e − st dt Z{ f ( k ) } ( z ) � � + ∞ f ( k ) z − k L{ f ( t ) } ( s ) � 0 − 0 e − sT z (sampling T) �� k � � � h ! e at � t h 1 z a k − h L ( s ) = Z ( z ) = ( s − a ) h +1 h ( z − a ) h +1 L{ f ( t − T ) } ( s ) = F ( s ) e − sT Z{ f ( k − n ) } ( z ) = F ( z ) z − n Z{ f ( k + n ) } ( z ) = z n � h =0 f ( h ) z − h � F ( z ) − � n − 1 L{ ˙ f ( t ) } ( s ) = sF ( s ) − F (0 − ) F ( s ) = c 0 + � ν � n i c i,j = c 0 + � ν � n i c i,j F ( z ) ( s − p i ) j , ( z − p i ) j , i =1 j =1 i =1 j =1 z 2 / 15
Laplace and Zeta transforms Differential equations State space Difference equations Forced response Laplace transforms and differential equations The Laplace transform can be used to obtain the solution of a linear differential equation. Example: As first transform ¨ y ( t ) + 3 ˙ y ( t ) + 2 y ( t ) = ˙ u ( t ) + 2 u ( t ) by Laplace transform into s 2 y ( s ) − sy (0 − ) − ˙ y (0 − ) + 3 sy ( s ) − 3 y (0 − ) + 2 y ( s ) = su ( s ) − u (0 − ) + 2 u ( s ) y ( s ) = sy (0 − ) + 3 y (0 − ) + ˙ y (0 − ) − u (0 − ) s + 2 + s 2 + 3 s + 2 + s 2 + 3 s + 2 u ( s ) (1) s 2 + 3 s + 2 � �� � � �� � free response forced response ⇓ ( u ( t ) = tδ − 1 ( t ) → u ( s ) = 1 /s 2 , u (0 − ) = 0) y ( s ) = c 1 , 1 s + 2 + c 2 , 1 s + 1 + c 3 , 1 + c 3 , 2 (2) s 2 s c 1 , 1 e − 2 t + c 2 , 1 e − t y ( t ) = + c 3 , 1 + c 3 , 2 t + ? δ − 1 ( t ) (3) ���� � �� � � �� � other modes? Plant modes Input modes 3 / 15
Laplace and Zeta transforms Differential equations State space Difference equations Forced response Zeta transforms and difference equations The Zeta transform can be used to obtain the solution of a linear difference equation. Example: As first transform y ( k + 2) + 3 y ( k + 1) + 2 y ( k ) = u ( k + 1) + 2 u ( k ) by Zeta transform into z 2 y ( z ) − z 2 y (0) − zy (1) + 3 zy ( z ) − 3 zy (0) + 2 y ( z ) = zu ( z ) − zu (0) + 2 u ( z ) y ( z ) = z 2 y (0) + 3 zy (0) + zy (1) − zu (0) z + 2 + z 2 + 3 z + 2 + z 2 + 3 z + 2 u ( z ) (4) z 2 + 3 z + 2 � �� � � �� � free response forced response ⇓ ( u ( k ) = kδ − 1 ( k ) = → u ( z ) = z/ ( z − 1) 2 , u (0) = 0) y ( z ) = c 1 , 1 z + 2 + c 2 , 1 z + 1 + c 3 , 1 ( z − 1) 2 + c 4 , 1 c 3 , 2 z − 1 + (5) z z c 1 , 1 ( − 2) k + c 2 , 1 ( − 1) k y ( k ) = + c 3 , 1 + c 3 , 2 k + c 4 , 1 δ 0 ( k − 1) ? δ − 1 ( t ) ���� � �� � � �� � other modes? Plant modes Input modes (6) 4 / 15
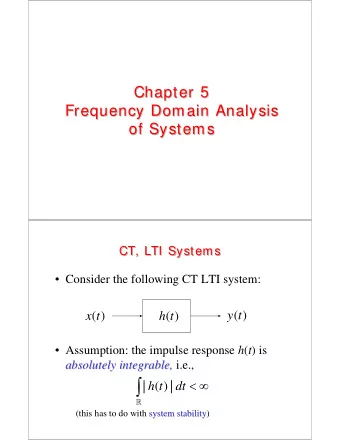
Laplace and Zeta transforms Continuous time State space Discrete time Forced response System modes Laplace transform for linear continuous time systems Consider the system in state space form obtained via Laplace transform as L ( · )( s ) � sx ( s ) − x 0 � x ( t ) ˙ = Ax ( t ) + Bu ( t ) , = Ax ( s ) + Bu ( s ) , ���� → (7) y ( t ) = Cx ( t ) + Du ( t ) , y ( s ) = Cx ( s ) + Du ( s ) , that through sx ( s ) − Ax ( s ) = x 0 + Bu ( s ) , ( sI − A ) x ( s ) = x 0 + Bu ( s ) , ( sI − A ) − 1 x ( s ) = ( sI − A ) − 1 ( x 0 + Bu ( s )) , [( sI − A ) is invertible ] x ( s ) = ( sI − A ) − 1 x 0 + ( sI − A ) − 1 Bu ( s ) , (8) allows to write = ( sI − A ) − 1 , Φ( s ) � x ( s ) = ( sI − A ) − 1 B, = Φ( s ) x 0 + H ( s ) u ( s ) , H ( s ) , (9) = C ( sI − A ) − 1 , y ( s ) = Ψ( s ) x 0 + W ( s ) u ( s ) , Ψ( s ) = C ( sI − A ) − 1 B + D. W ( s ) 5 / 15
Laplace and Zeta transforms Continuous time State space Discrete time Forced response System modes State and output response in Laplace domain = ( sI − A ) − 1 x 0 = Φ( s ) x 0 , x l ( s ) � x ( s ) = ( sI − A ) − 1 Bu ( s ) = H ( s ) u ( s ) , = x l ( s ) + x f ( s ) , x f ( s ) , = C ( sI − A ) − 1 x 0 = Ψ( s ) x 0 , y ( s ) = y l ( s ) + y f ( s ) , y l ( s ) = ( C ( sI − A ) − 1 B + D ) u ( s ) = W ( s ) u ( s ) , y f ( s ) (10) where x l ( s ) is the free state response in s , x f ( s ) is the forced state response in s , y l ( s ) is the free output response in s and y f ( s ) is the forced output-response in s . The rational function W ( s ) is called the system transfer function and is defined as y ( s ) u ( s ) = W ( s ) � C ( sI − A ) − 1 B + D when y ( i ) (0 − ) = 0 ⇐ ⇒ x 0 = 0 . (11) Since the Lagrange solution for continuous-time LTI systems is given by (prove it) � t x ( t ) = e A ( t − t 0 ) x 0 + e A ( t − τ ) Bu ( τ ) dτ (12) t 0 and x ( t ) = L − 1 � � ( sI − A ) − 1 x 0 + ( sI − A ) − 1 Bu ( s ) ( t ) , (13) then... 6 / 15
Laplace and Zeta transforms Continuous time State space Discrete time Forced response System modes Continuous time state response: free evolution ... with t 0 = 0 it holds true that L − 1 { ( sI − A ) − 1 } ( t ) = L − 1 { Φ( s ) } ( t ) = e At , (14) � t L − 1 { ( sI − A ) − 1 Bu ( s ) } ( t ) = L − 1 { H ( s ) u ( s ) } ( t ) = e A ( t − τ ) Bu ( τ ) dτ, (15) 0 in accordance also with the Laplace convolution theorem. Then, by mean of the residual technique iterated for each component of the state x and the matrix elements, it is possible to write the Laplace state transform of the free state response as m i ν 1 � � x l ( s ) = ( sI − A ) − 1 x 0 = ( s − λ i ) h R i,h x 0 , (16) i =1 h =1 where R i,h is the generalized residual matrix of ( sI − A ) − 1 and λ i ∈ σ { A } are the eigenvalues of A . Then by inverse Laplace transform it is possible to obtain m i ν t h − 1 � � ( h − 1)! e λ i t x l ( t ) = δ − 1 ( t ) R i,h x 0 . (17) i =1 h =1 � �� � system modes 7 / 15
Laplace and Zeta transforms Continuous time State space Discrete time Forced response System modes Discrete time state response: free evolution Consider the discrete time system and the Z-transform as � x ( k + 1) Z ( · )( s ) � zx ( z ) − zx 0 = Ax ( k ) + Bu ( k ) , = Ax ( z ) + Bu ( z ) , ���� → y ( k ) = Cx ( k ) + Du ( k ) , y ( z ) = Cx ( z ) + Du ( z ) , (18) that through zx ( z ) − Ax ( z ) = zx 0 + Bu ( z ) , ( zI − A ) x ( z ) = zx 0 + Bu ( z ) , ( zI − A ) − 1 x ( z ) = ( zI − A ) − 1 ( zx 0 + Bu ( z )) , [( zI − A ) is invertible ] x ( z ) = z ( zI − A ) − 1 x 0 + ( zI − A ) − 1 Bu ( z ) , (19) allows to write = z ( zI − A ) − 1 , Φ( z ) � x ( z ) = ( zI − A ) − 1 B, = Φ( z ) x 0 + H ( z ) u ( z ) , H ( z ) , (20) = zC ( zI − A ) − 1 , y ( z ) = Ψ( z ) x 0 + W ( z ) u ( z ) , Ψ( z ) = C ( zI − A ) − 1 B + D. W ( s ) 8 / 15
Laplace and Zeta transforms Continuous time State space Discrete time Forced response System modes State and output response in the Z domain = z ( zI − A ) − 1 x 0 = Φ( z ) x 0 , x l ( z ) � x ( z ) = ( zI − A ) − 1 Bu ( z ) = H ( z ) u ( z ) , = x l ( z ) + x f ( z ) , x f ( z ) , = zC ( zI − A ) − 1 x 0 = Ψ( z ) x 0 , y ( z ) = y l ( z ) + y f ( z ) , y l ( z ) = ( C ( zI − A ) − 1 B + D ) u ( z ) = W ( z ) u ( z ) , y f ( z ) (21) where x l ( z ) is the free state response in z , x f ( z ) is the forced state response in z , y l ( z ) is the free output response in z and y f ( z ) is the forced output-response in z . The rational function W ( z ) is called the system transfer function and is defined as y ( z ) u ( z ) = W ( z ) � C ( zI − A ) − 1 B + D when y ( i ) = 0 ⇐ ⇒ x 0 = 0 . (22) Since the Lagrange solution for discrete time LTI systems is given by (prove it) k − 1 � x ( k ) = A k x 0 + A k − h − 1 Bu ( h ) , (23) h =0 and x ( k ) = Z − 1 � � z ( zI − A ) − 1 x 0 + ( zI − A ) − 1 Bu ( z ) ( k ) , (24) then... 9 / 15
Laplace and Zeta transforms Continuous time State space Discrete time Forced response System modes Discrete time state response: free evolution ...then Z − 1 { z ( zI − A ) − 1 } ( k ) = Z − 1 { Φ( z ) } ( k ) = A k , (25) k − 1 � Z − 1 { ( zI − A ) − 1 Bu ( z ) } ( k ) = Z − 1 { H ( z ) u ( z ) } ( k ) = A k − h − 1 Bu ( h ) , (26) h =0 in accordance also with the Zeta transform convolution theorem. Then, by mean of the residual technique iterated for each component of the state x and the matrix elements, it is possible to write the Laplace state transform of the free state response as ν m i z � � x l ( z ) = z ( zI − A ) − 1 x 0 = ( z − λ i ) h R i,h x 0 , (27) i =1 h =1 where R i,h is the generalized residual matrix of ( zI − A ) − 1 and λ i ∈ σ { A } are the eigenvalues of A . Then by inverse Zeta transform it is possible to obtain ν m i � � � � k λ k − h +1 x l ( z ) = δ − 1 ( k ) R i,h x 0 . (28) h − 1 i i =1 h =1 � �� � system modes 10 / 15
Recommend








More recommend
Explore More Topics
Stay informed with curated content and fresh updates.