L ECTURE 13: D ISCRETE -T IME D YNAMICAL S YSTEMS 1 TEACHER : G IANNI - PowerPoint PPT Presentation
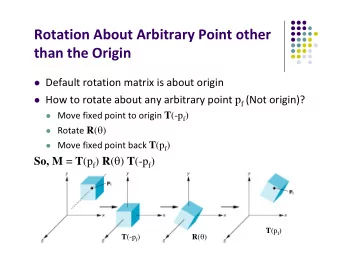
15-382 C OLLECTIVE I NTELLIGENCE S19 L ECTURE 13: D ISCRETE -T IME D YNAMICAL S YSTEMS 1 TEACHER : G IANNI A. D I C ARO R ECAP : G ENERAL DEFINITION OF DYNAMICAL SYSTEMS A dynamical system is a 3-tuple ", !, : ! is a set of all possible
15-382 C OLLECTIVE I NTELLIGENCE – S19 L ECTURE 13: D ISCRETE -T IME D YNAMICAL S YSTEMS 1 TEACHER : G IANNI A. D I C ARO
R ECAP : G ENERAL DEFINITION OF DYNAMICAL SYSTEMS A dynamical system is a 3-tuple ", !, Φ : ! is a set of all possible states of the dynamical system (the state space) § " is the set of values the time (evolution) parameter can take § Φ is the evolution function of the dynamical system, that associates to each § $ ∈ ! a unique image in ! depending on the time parameter &, (not all pairs (&, $) are feasible, that requires introducing the subset *) Φ: * ⊆ "×! → ! Φ 0, $ = $ 1 (the initial condition) Ø Φ & 2 , 3 & 4 , $ = Φ(& 2 + & 4 , $) , (property of states) Ø for & 4 , & 4 +& 2 ∈ 6($) , & 2 ∈ 6(Φ(& 4 $)) , 6 $ = {& ∈ " ∶ (&, $) ∈ *} The evolution function Φ provides the system state (the value ) at time & Ø for any initial state $ 1 : ; = {Φ &, $ ∶ & ∈ 6 $ } orbit (flow lines) of the system through $ , Ø starting in $ , the set of visited states as a function of time: $(&) 2
R ECAP : T YPES OF D YNAMICAL SYSTEMS Informally: A dynamical system defines a deterministic rule that allows § to know the current state as a function of past states Given an initial condition ! " = !(0) ∈ ( , a deterministic trajectory ! ) , § ) ∈ + ! " , is produced by ,, (, Φ States can be “anything” mathematically well-behaved that represent § situations of interest The nature of the set . and of the function / give raise to different § classes of dynamical systems (and resulting properties and trajectories) 3
T YPES OF D YNAMICAL SYSTEMS Continuous time dynamical systems (Flows): ! open interval of ℝ , § Φ continous and differentiable function à Differential equations § Φ represents a flow, defining a smooth (differentiable) continuous curve § The notion of flow builds on and formalizes the idea of the motion of particles in a fluid: it can be viewed as the abstract representation of (continuous) motion of points over time . Discrete-time dynamical systems (Maps): ! interval of ℤ , Φ a function § § Φ , represents an iterated map , which is not a flow (a differentiable curve) anymore, since the trajectory is a discrete set of points § Trajectory is represented through linear interpolation and it can easily present large slope changes at the points (e.g., cuspids) 4
D ISCRETE -T IME D YNAMICAL SYSTEMS Discrete-time dynamical systems (Maps): ! interval of ℤ , Φ a function § The iterated map Φ is generated by a set of recurrence equations $ on % ⊆ ℝ ( § (also referred to as difference equations ) The orbits )(+) are sets of discrete points resulting from the closed-form § solution (not always achievable) of the recurrence equations Example with one single recurrence equation: § - ( = /(- (01 , - (03 , … , - (05 ) Order- 6 Markov states: relevant state information includes all past 6 states § Well-known example: Fibonacci recurrence equation § - ( = - (01 + - (03 § Initial condition (that uniquely determines the orbit): - 8 = 9 , - 1 = : § 5
F ROM LOCAL RULES TO GLOBAL BEHAVIORS ? '( '" = )((, ") Flows Maps - . = )(- ./0 , - ./1 , … , - ./3 ) ∆" = 1 , when ∆" → 0 à '" à Differential eq. For an infinitesimal time, only the instantaneous variation, the velocity , makes § sense à The next state is expressed implicitly, and all the instantaneous variations, local in time, must be integrated in order to obtain the global behavior ((") In maps time step is finite and discrete , the time-local iteration rule is a local § description that can give rise to extremely complex global behaviors à How do we integrate the local description into global behaviors? § à How do we predict global behaviors from the local descriptions? § 6
M APS Where maps can arise from? § Inherently discrete-time processes: looking at populations in terms of § generations, epidemics in terms of weeks, economy in terms of quarters or years, traffic models per hour, growth per days, … Discretization of differential equations : § Euler method: ̇ " = $(") à " '() = " ' + ℎ$(" ' ) , …Runge-Kutta,… § Discretization of algebraic equations: § Newton’s method for solving , - = 0 à Expand in Taylor series near § - ' : , - = , - ' + - − - ' , 1 - ' + ⋯ taking the usual linear approximation: , - ≈ , - ' + - − - ' , 1 - ' , equating to 0: - '() = - ' − , - ' /, 1 - ' Let’s focus on one-dimensional maps § Even in one dimension, iterated maps can produce incredibly complex behaviors, § including deterministic chaos! Later on, we will consider multi-dimensional maps defined over a lattice (spatial § grid) à Cellular Automata à even more complex behaviors 7
M APS : SAME TERMINOLOGY AS IN FLOWS ! " = 2" , ! is a map § The orbit of " under the map ! is the set of points: § , … } = {", ! " , ! ) " , ! * " , … } {", ! " , ! ! " , ! ! ! " corresponding to the iterated application of the map The initial point provides the initial conditions § A point " ∗ , such that ! " ∗ = " ∗ is a fixed point, the orbits remain in § " ∗ for all future iterations !(") Cobweb plots for ! " = 2"(1 − ") individual orbits 8
F IXED , E QUILIBRIUM POINTS Starts at 1.6, converges to 1 § Starts at 1.8, converges to -1 § Stability of a fixed point ! ∗ ? Fixed points correspond to intersection between graph #(%) and % § +(! ∗ ) = ! ∗ General map: ! '() = +(! ' ) , § Let’s consider a near orbit , ! ' = ! ∗ + - ' : is the orbit attracted or repelled § from ! ∗ ? If it’s attracted we can say that ! ∗ is stable Does the perturbation - ' grow or decay with / ? § By the definition, ! ∗ + - '() = ! '() = +(! ∗ + - ' ) , and using the Taylor § series expansion about ! ∗ : ! ∗ + - '() = ! '() = + ! ∗ + - ' = + ! ∗ + + 0 ! ∗ - ' + 1(- '2 ) Given that +(! ∗ ) = ! ∗ à - '() = + 0 ! ∗ - ' + 1(- '2 ) § If we take the linear approximation à Linearized map: - '() = + 0 ! ∗ - ' § Eigenvalue / multiplier: 3 = + 0 ! ∗ § 9
F IXED POINTS Linearized map: ! "#$ = & ' ( ∗ ! " § Solution of linearized map: ! $ = *! + , ! - = *! $ = * - ! + ….. ! " = * " ! + § If * = |& ' ( ∗ | < 1 à ! " → 0, for 3 → ∞, and ( ∗ is linearly stable § If * = |& ' ( ∗ | > 1 à ! " → ∞, for 3 → ∞, and ( ∗ is unstable § The linear stability holds also for the general map § The marginal case * = |& ' ( ∗ | = 1 doesn’t allow to draw conclusions. § In this case the quadratic term 6(! "- ) determines the stability If * =0, then the fixed point is said superstable § ( "#$ = sin ( " § ( ∗ = 0 is a fixed point § * = & ' ( ∗ = 1 , marginal case § Cobweb à It’s stable! § Is it global? For all orbits ( " → 0 ? § For any ( + , ( $ ∈ [−1,1] since |sin ( $ | < 1 § 1 à From cobweb we can say it’s global § 10
A NOTHER EXAMPLE , LIMITING BEHAVIOR ! "#$ = cos ! " § "→- ! " ? … by iterating the map (e.g., use calculator!), ! " → 0.739.. lim § Solution of trascendental equation ! = cos ! § The fixed point 0.739… has . < 0 à Damped oscillations § For 0 < . < 1 convergence to a stable fixed point is monotonic § 11
L OGISTIC MAP ! "#$ = &! " (1 − ! " ) § ! " is a dimensionless measure of the population in the + -th generation § and & is the intrinsic growth rate (with capacity being limited to 1) Let’s restrict 0 ≤ & ≤ 4 § à Then map maps 0,1 → 0,1 Let’s fix & and study the evolution § Trivially, for small growth rates, § & < 1, the population always 1 ! " goes extinct, as ! " → 0 2 For 1 < & < 3 , population grows § and eventually reaches a non-zero steady state Watch out: this a time series! 12
A PATH TO THE CHAOS … 13
R EGULAR BEHAVIOR , PERIODIC ATTRACTORS 14
R EGULAR BEHAVIOR , PERIODIC ATTRACTORS 15
T RANSITION TO CHAOTIC BEHAVIOR 16
C HAOS : S ENSITIVITY TO INITIAL CONDITIONS 17
Recommend



More recommend
Explore More Topics
Stay informed with curated content and fresh updates.