
k-set agreement in communication networks with omission faults - PowerPoint PPT Presentation
k-set agreement in communication networks with omission faults Emmanuel Godard Eloi Perdereau Laboratoire dInformatique Fondamentale 02/10/2017 DESCARTES 2-4 octobre 2017 - Chasseneuil-du-Poitou Model and problem Distributed model The
k-set agreement in communication networks with omission faults Emmanuel Godard Eloi Perdereau Laboratoire d’Informatique Fondamentale 02/10/2017 DESCARTES 2-4 octobre 2017 - Chasseneuil-du-Poitou
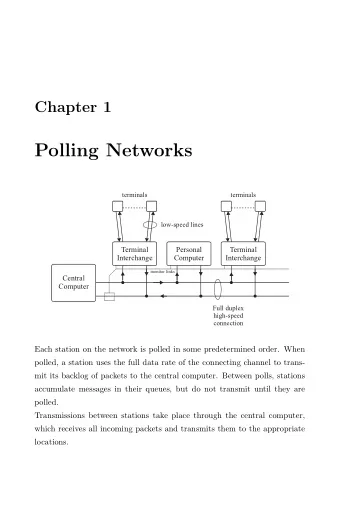
Model and problem Distributed model The distributed model : Synchronous; Message passing; Underlying connected communication graph G = ( V , E ) fixed; Dynamic network; f omission faults, i . e . at each round : f messages can be lost. E. Godard (L.I.F) k-set agreement with omission faults 02/10/2017 2 / 24
Model and problem Distributed model The distributed model : Synchronous; Message passing; Underlying connected communication graph G = ( V , E ) fixed; Dynamic network; f omission faults, i . e . at each round : f messages can be lost. E. Godard (L.I.F) k-set agreement with omission faults 02/10/2017 2 / 24
Model and problem Distributed model The distributed model : Synchronous; Message passing; Underlying connected communication graph G = ( V , E ) fixed; Dynamic network; f omission faults, i . e . at each round : f messages can be lost. E. Godard (L.I.F) k-set agreement with omission faults 02/10/2017 2 / 24
Model and problem Distributed model The distributed model : Synchronous; Message passing; Underlying connected communication graph G = ( V , E ) fixed; Dynamic network; f omission faults, i . e . at each round : f messages can be lost. E. Godard (L.I.F) k-set agreement with omission faults 02/10/2017 2 / 24
Model and problem Distributed model The distributed model : Synchronous; Message passing; Underlying connected communication graph G = ( V , E ) fixed; Dynamic network; f omission faults, i . e . at each round : f messages can be lost. E. Godard (L.I.F) k-set agreement with omission faults 02/10/2017 2 / 24
Model and problem Distributed model The distributed model : Synchronous; Message passing; Underlying connected communication graph G = ( V , E ) fixed; Dynamic network; f omission faults, i . e . at each round : f messages can be lost. E. Godard (L.I.F) k-set agreement with omission faults 02/10/2017 2 / 24
Model and problem The k -set agreement problem The k -set agreement problem : k -Agreement The set of output values contains at most k elements. Validity The decided values are ones of the initial values. Termination All processes must decide. E. Godard (L.I.F) k-set agreement with omission faults 02/10/2017 3 / 24
Model and problem Message adversaries First introduced by Afek & Gafni (2013) Message adversary : set of infinite sequences of digraphs ( instant graphs ) defining the messages received in each round. Oblivious message adversary : the set of potential graphs in each round remains constant all along the execution. ⇒ Set of instant digraphs. E. Godard (L.I.F) k-set agreement with omission faults 02/10/2017 4 / 24
Model and problem The f -omission message adversary : O f ( G ) For example, the message adversary that allows at most f faults : Definition ( f -omissions message adversary) O f ( G ) = { G ′ = ( V , A ′ ) | A ′ ⊆ A ∧ | A | − | A ′ | ≤ f } Example of f -omission message adversary : O 1 ( P 3 ) P 3 O 1 ( P 3 ) E. Godard (L.I.F) k-set agreement with omission faults 02/10/2017 5 / 24
Model and problem The f -omission message adversary : O f ( G ) For example, the message adversary that allows at most f faults : Definition ( f -omissions message adversary) O f ( G ) = { G ′ = ( V , A ′ ) | A ′ ⊆ A ∧ | A | − | A ′ | ≤ f } Example of f -omission message adversary : O 1 ( P 3 ) P 3 O 1 ( P 3 ) E. Godard (L.I.F) k-set agreement with omission faults 02/10/2017 5 / 24
Model and problem Our contribution : computability of k -set agreement How many lost messages (omissions) the k -set agreement is tolerant to ? Theorem Let k ∈ N and G = ( V , E ) be any communication network. The k − set agreement problem is solvable despite f omission faults if and only if f ≤ c k ( G ) . c k ( G ) is the maximum number of ( undirected ) edges that can be removed without disconnecting G in k + 1 components. i . e . removing c k ( G ) edges from G keeps at most k connected components on G . ⇒ the standard connectivity is c 1 ( G ) + 1 . E. Godard (L.I.F) k-set agreement with omission faults 02/10/2017 6 / 24
Model and problem Our contribution : computability of k -set agreement How many lost messages (omissions) the k -set agreement is tolerant to ? Theorem Let k ∈ N and G = ( V , E ) be any communication network. The k − set agreement problem is solvable despite f omission faults if and only if f ≤ c k ( G ) . c k ( G ) is the maximum number of ( undirected ) edges that can be removed without disconnecting G in k + 1 components. i . e . removing c k ( G ) edges from G keeps at most k connected components on G . ⇒ the standard connectivity is c 1 ( G ) + 1 . E. Godard (L.I.F) k-set agreement with omission faults 02/10/2017 6 / 24
Model and problem Our contribution : computability of k -set agreement How many lost messages (omissions) the k -set agreement is tolerant to ? Theorem Let k ∈ N and G = ( V , E ) be any communication network. The k − set agreement problem is solvable despite f omission faults if and only if f ≤ c k ( G ) . c k ( G ) is the maximum number of ( undirected ) edges that can be removed without disconnecting G in k + 1 components. i . e . removing c k ( G ) edges from G keeps at most k connected components on G . ⇒ the standard connectivity is c 1 ( G ) + 1 . E. Godard (L.I.F) k-set agreement with omission faults 02/10/2017 6 / 24
Model and problem Example of c k ( G ) G E. Godard (L.I.F) k-set agreement with omission faults 02/10/2017 7 / 24
Model and problem Example of c k ( G ) G c 1 ( G ) = 0 E. Godard (L.I.F) k-set agreement with omission faults 02/10/2017 7 / 24
Model and problem Example of c k ( G ) G c 1 ( G ) = 0 E. Godard (L.I.F) k-set agreement with omission faults 02/10/2017 7 / 24
Model and problem Example of c k ( G ) G c 1 ( G ) = 0 c 2 ( G ) = 3 E. Godard (L.I.F) k-set agreement with omission faults 02/10/2017 7 / 24
Model and problem Example of c k ( G ) G c 1 ( G ) = 0 c 2 ( G ) = 3 E. Godard (L.I.F) k-set agreement with omission faults 02/10/2017 7 / 24
Model and problem Example of c k ( G ) G c 1 ( G ) = 0 c 2 ( G ) = 3 E. Godard (L.I.F) k-set agreement with omission faults 02/10/2017 7 / 24
Model and problem Example of c k ( G ) G c 1 ( G ) = 0 c 2 ( G ) = 3 E. Godard (L.I.F) k-set agreement with omission faults 02/10/2017 7 / 24
Model and problem Example of c k ( G ) G c 1 ( G ) = 0 c 2 ( G ) = 3 E. Godard (L.I.F) k-set agreement with omission faults 02/10/2017 7 / 24
Model and problem Example of c k ( G ) G c 1 ( G ) = 0 c 2 ( G ) = 3 c 3 ( G ) = 5 E. Godard (L.I.F) k-set agreement with omission faults 02/10/2017 7 / 24
Model and problem Example of c k ( G ) G c 1 ( G ) = 0 c 2 ( G ) = 3 c 3 ( G ) = 5 E. Godard (L.I.F) k-set agreement with omission faults 02/10/2017 7 / 24
Model and problem Example of c k ( G ) G c 1 ( G ) = 0 c 2 ( G ) = 3 c 3 ( G ) = 5 E. Godard (L.I.F) k-set agreement with omission faults 02/10/2017 7 / 24
Model and problem Outline Model and problem 1 Impossibility proofs 2 Impossibility of 2-set in K 3 and P 3 ( | G | = k + 1 = 3) Reduction from the case | G | > k + 1 Impossibility of set-agreement for generalized tournaments Possibility : a priority-based algorithm 3 E. Godard (L.I.F) k-set agreement with omission faults 02/10/2017 8 / 24
Model and problem Outline Model and problem 1 Impossibility proofs 2 Impossibility of 2-set in K 3 and P 3 ( | G | = k + 1 = 3) Reduction from the case | G | > k + 1 Impossibility of set-agreement for generalized tournaments Possibility : a priority-based algorithm 3 E. Godard (L.I.F) k-set agreement with omission faults 02/10/2017 8 / 24
Model and problem Outline Model and problem 1 Impossibility proofs 2 Impossibility of 2-set in K 3 and P 3 ( | G | = k + 1 = 3) Reduction from the case | G | > k + 1 Impossibility of set-agreement for generalized tournaments Possibility : a priority-based algorithm 3 E. Godard (L.I.F) k-set agreement with omission faults 02/10/2017 8 / 24
Impossibility proofs Outline Model and problem 1 Impossibility proofs 2 Impossibility of 2-set in K 3 and P 3 ( | G | = k + 1 = 3) Reduction from the case | G | > k + 1 Impossibility of set-agreement for generalized tournaments Possibility : a priority-based algorithm 3 E. Godard (L.I.F) k-set agreement with omission faults 02/10/2017 9 / 24
Impossibility proofs Results for K 3 and P 3 (a) K 3 (b) P 3 ❍❍❍❍❍ ❍❍❍❍❍ k k 1 2 3 1 2 3 f f ❍ ❍ 1 yes yes yes 1 no yes yes 2 no yes yes 2 no no yes 3 no no yes 3 no no yes E. Godard (L.I.F) k-set agreement with omission faults 02/10/2017 10 / 24
Impossibility proofs Impossibility of 2-set in K 3 and P 3 ( | G | = k + 1 = 3) Classical impossibility proof in O 3 ( K 3 ) E. Godard (L.I.F) k-set agreement with omission faults 02/10/2017 11 / 24
Impossibility proofs Impossibility of 2-set in K 3 and P 3 ( | G | = k + 1 = 3) Classical impossibility proof in O 3 ( K 3 ) E. Godard (L.I.F) k-set agreement with omission faults 02/10/2017 11 / 24
Recommend






![(6) a. ERG agreement ABS agreement (not encoded in (3)) SUBJ OBJ [!] F ROM S YNTAX TO E](https://c.sambuz.com/810941/6-a-erg-agreement-abs-agreement-not-encoded-in-3-subj-obj-s.webp)


More recommend
Explore More Topics
Stay informed with curated content and fresh updates.