Jack Symmetric Functions and the Non-Orientability of Rooted Maps - PowerPoint PPT Presentation
Jack Symmetric Functions and the Non-Orientability of Rooted Maps Michael La Croix University of Waterloo January 4, 2012 Graphs, Surfaces, and Maps Example Definition A surface is a compact 2 -manifold without boundary. Definition A graph
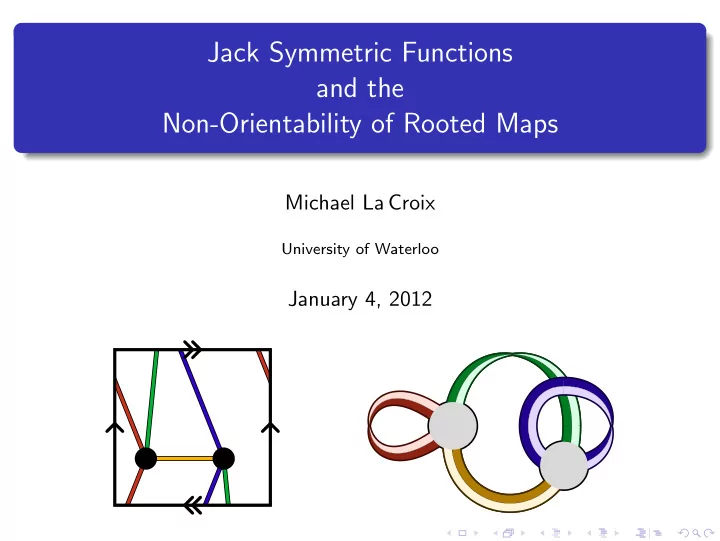
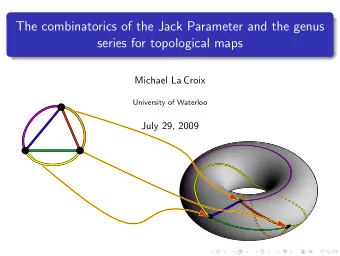
Jack Symmetric Functions and the Non-Orientability of Rooted Maps Michael La Croix University of Waterloo January 4, 2012
Graphs, Surfaces, and Maps Example Definition A surface is a compact 2 -manifold without boundary. Definition A graph is a finite set of vertices together with a finite set of edges , such that each edge is associated with either one or two vertices. Definition A map is a 2-cell embedding of a graph in a surface. Michael La Croix (University of Waterloo) The Jack Parameter and non-orientability January 4, 2012 1 / 11
Graphs, Surfaces, and Maps Example Definition A surface is a compact 2 -manifold without boundary. Definition A graph is a finite set of vertices together with a finite set of edges , such that each edge is associated with either one or two vertices. Definition A map is a 2-cell embedding of a graph in a surface. Michael La Croix (University of Waterloo) The Jack Parameter and non-orientability January 4, 2012 1 / 11
Graphs, Surfaces, and Maps Example Definition A surface is a compact 2 -manifold without boundary. Definition A graph is a finite set of vertices together with a finite set of edges , such that each edge is associated with either one or two vertices. Definition A map is a 2-cell embedding of a graph in a surface. Michael La Croix (University of Waterloo) The Jack Parameter and non-orientability January 4, 2012 1 / 11
Ribbon Graphs and Flags Example Definition The neighbourhood of the graph determines a ribbon graph , and the boundaries of ribbons determine flags . Definition Automorphisms permute flags, and a rooted map is a map together with a distinguished orbit of flags. Michael La Croix (University of Waterloo) The Jack Parameter and non-orientability January 4, 2012 1 / 11
Ribbon Graphs and Flags Example Definition The neighbourhood of the graph determines a ribbon graph , and the boundaries of ribbons determine flags . Definition Automorphisms permute flags, and a rooted map is a map together with a distinguished orbit of flags. Michael La Croix (University of Waterloo) The Jack Parameter and non-orientability January 4, 2012 1 / 11
Ribbon Graphs and Flags Example Definition The neighbourhood of the graph determines a ribbon graph , and the boundaries of ribbons determine flags . Definition Automorphisms permute flags, and a rooted map is a map together with a distinguished orbit of flags. Michael La Croix (University of Waterloo) The Jack Parameter and non-orientability January 4, 2012 1 / 11
Ribbon Graphs and Flags Example Definition The neighbourhood of the graph determines a ribbon graph , and the boundaries of ribbons determine flags . Definition Automorphisms permute flags, and a rooted map is a map together with a distinguished orbit of flags. Michael La Croix (University of Waterloo) The Jack Parameter and non-orientability January 4, 2012 1 / 11
Rooted Maps Example Definition The neighbourhood of the graph determines a ribbon graph , and the boundaries of ribbons determine flags . Definition Automorphisms permute flags, and a rooted map is a map together with a distinguished orbit of flags. Michael La Croix (University of Waterloo) The Jack Parameter and non-orientability January 4, 2012 1 / 11
Rooted Maps Example Definition The neighbourhood of the graph determines a ribbon graph , and the boundaries of ribbons determine flags . Definition Automorphisms permute flags, and a rooted map is a map together with a distinguished orbit of flags. Michael La Croix (University of Waterloo) The Jack Parameter and non-orientability January 4, 2012 1 / 11
Rooted Maps Example Definition The neighbourhood of the graph determines a ribbon graph , and the boundaries of ribbons determine flags . Definition Automorphisms permute flags, and a rooted map is a map together with a distinguished orbit of flags. Note The map with no edges, , has a rooting. Michael La Croix (University of Waterloo) The Jack Parameter and non-orientability January 4, 2012 1 / 11
A Combinatorial Encoding of Maps Equivalence classes can be encoded by perfect matchings of flags. Start with a ribbon graph. Michael La Croix (University of Waterloo) The Jack Parameter and non-orientability January 4, 2012 2 / 11
A Combinatorial Encoding of Maps Equivalence classes can be encoded by perfect matchings of flags. Start with a ribbon graph. Michael La Croix (University of Waterloo) The Jack Parameter and non-orientability January 4, 2012 2 / 11
A Combinatorial Encoding of Maps Equivalence classes can be encoded by perfect matchings of flags. M v M e M f Ribbon boundaries determine 3 perfect matchings of flags. Michael La Croix (University of Waterloo) The Jack Parameter and non-orientability January 4, 2012 2 / 11
A Combinatorial Encoding of Maps Equivalence classes can be encoded by perfect matchings of flags. M v M e Pairs of matchings determine, faces, Michael La Croix (University of Waterloo) The Jack Parameter and non-orientability January 4, 2012 2 / 11
A Combinatorial Encoding of Maps Equivalence classes can be encoded by perfect matchings of flags. M v M f Pairs of matchings determine, faces, edges, Michael La Croix (University of Waterloo) The Jack Parameter and non-orientability January 4, 2012 2 / 11
A Combinatorial Encoding of Maps Equivalence classes can be encoded by perfect matchings of flags. M e M f Pairs of matchings determine, faces, edges, and vertices. Michael La Croix (University of Waterloo) The Jack Parameter and non-orientability January 4, 2012 2 / 11
A Combinatorial Encoding of Maps M v 5 6’ 5’ 6 7’ 2 7 2’ M e 8 8’ 3’ 1 3 1’ 4’ 4 M f { 1 , 3 } , { 1 ′ , 3 ′ } , { 2 , 5 } , { 2 ′ , 5 ′ } , { 4 , 8 ′ } , { 4 ′ , 8 } , { 6 , 7 } , { 6 ′ , 7 ′ } � � M v = { 1 , 2 ′ } , { 1 ′ , 4 } , { 2 , 3 ′ } , { 3 , 4 ′ } , { 5 , 6 ′ } , { 5 ′ , 8 } , { 6 , 7 ′ } , { 7 , 8 ′ } � � M e = { 1 , 1 ′ } , { 2 , 2 ′ } , { 3 , 3 ′ } , { 4 , 4 ′ } , { 5 , 5 ′ } , { 6 , 6 ′ } , { 7 , 7 ′ } , { 8 , 8 ′ } � � M f = Michael La Croix (University of Waterloo) The Jack Parameter and non-orientability January 4, 2012 2 / 11
Hypermaps Generalizing the combinatorial encoding, an arbitrary triple of perfect matchings determines a hypermap when the triple induces a connected graph, with cycles of M e ∪ M f , M e ∪ M v , and M v ∪ M f determining vertices, hyperfaces, and hyperedges. Example Hypermaps both specialize and generalize maps. Example ֒ → Hypermaps can be represented as face-bipartite maps. Michael La Croix (University of Waterloo) The Jack Parameter and non-orientability January 4, 2012 3 / 11
Hypermaps Generalizing the combinatorial encoding, an arbitrary triple of perfect matchings determines a hypermap when the triple induces a connected graph, with cycles of M e ∪ M f , M e ∪ M v , and M v ∪ M f determining vertices, hyperfaces, and hyperedges. Example Hypermaps both specialize and generalize maps. Example ֒ → Maps can be represented as hypermaps with ǫ = [2 n ] . Michael La Croix (University of Waterloo) The Jack Parameter and non-orientability January 4, 2012 3 / 11
The Hypermap Series Definition The hypermap series for a set H of hypermaps is the combinatorial sum � x ν ( h ) y φ ( h ) z ǫ ( h ) H ( x , y , z ) := h ∈H where ν ( h ) , φ ( h ) , and ǫ ( h ) are the vertex-, hyperface-, and hyperedge- degree partitions of h . Example Example x 3 x 3 x 3 x 3 x 3 x 3 x 2 x 2 x 2 x 2 x 2 x 2 � x 3 x 3 x 3 x 3 x 3 x 3 x 3 x 3 x 3 x 3 x 3 x 3 2 x 2 x 2 x 2 x 2 x 2 x 2 x 2 x 2 x 2 x 2 x 2 x 2 � y 5 ) z 6 Rootings of contribute 12 ( y 3 y 3 y 3 y 4 y 4 y 5 y 5 2 to the sum. y 3 y 3 y 3 y 3 y 3 y 3 y 3 y 3 y 3 y 3 y 3 y 3 y 3 y 3 y 3 y 4 y 4 y 4 y 5 y 4 y 4 y 4 y 4 y 4 y 4 y 4 y 4 y 4 y 4 y 4 y 4 y 4 y 5 y 5 y 5 y 5 y 5 y 5 y 5 y 5 y 5 y 5 y 5 y 5 y 5 y 5 2 2 2 2 2 2 2 2 2 2 2 3 3 3 3 3 3 3 3 3 3 3 3 2 2 2 2 2 2 3 3 3 3 3 3 Michael La Croix (University of Waterloo) The Jack Parameter and non-orientability January 4, 2012 4 / 11
The Hypermap Series Definition The hypermap series for a set H of hypermaps is the combinatorial sum � x ν ( h ) y φ ( h ) z ǫ ( h ) H ( x , y , z ) := h ∈H where ν ( h ) , φ ( h ) , and ǫ ( h ) are the vertex-, hyperface-, and hyperedge- degree partitions of h . Example Example x 3 x 3 x 3 x 3 x 3 x 3 x 2 x 2 x 2 x 2 x 2 x 2 � x 3 x 3 x 3 x 3 x 3 x 3 x 3 x 3 x 3 x 3 x 3 x 3 2 x 2 x 2 x 2 x 2 x 2 x 2 x 2 x 2 x 2 x 2 x 2 x 2 � y 5 ) z 6 Rootings of contribute 12 ( y 3 y 3 y 3 y 4 y 4 y 5 y 5 2 to the sum. y 3 y 3 y 3 y 3 y 3 y 3 y 3 y 3 y 3 y 3 y 3 y 3 y 3 y 3 y 3 y 4 y 4 y 4 y 5 y 4 y 4 y 4 y 4 y 4 y 4 y 4 y 4 y 4 y 4 y 4 y 4 y 4 y 5 y 5 y 5 y 5 y 5 y 5 y 5 y 5 y 5 y 5 y 5 y 5 y 5 y 5 2 2 2 2 2 2 2 2 2 2 2 3 3 3 3 3 3 3 3 3 3 3 3 2 2 2 2 2 2 3 3 3 3 3 3 Michael La Croix (University of Waterloo) The Jack Parameter and non-orientability January 4, 2012 4 / 11
Recommend

![0 4 1 3 2 No deterministic symmetric dining solution [RL81] Probabilistic symmetric](https://c.sambuz.com/1034890/0-4-1-3-2-s.webp)



More recommend
Explore More Topics
Stay informed with curated content and fresh updates.