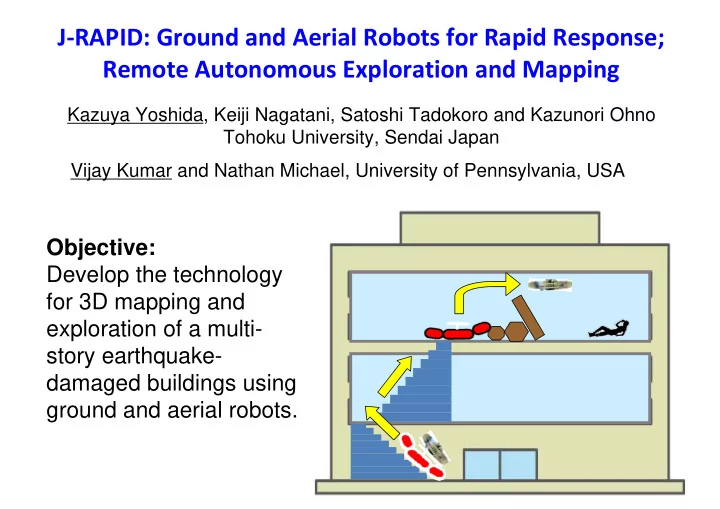
J ‐ RAPID: Ground and Aerial Robots for Rapid Response; Remote Autonomous Exploration and Mapping Kazuya Yoshida, Keiji Nagatani, Satoshi Tadokoro and Kazunori Ohno Tohoku University, Sendai Japan Vijay Kumar and Nathan Michael, University of Pennsylvania, USA Objective: Develop the technology for 3D mapping and exploration of a multi- story earthquake- damaged buildings using ground and aerial robots.
アプローチ Mission Consideration � Even though ground robot vehicles, Kenaf and Quince are very capable ground vehicles, surface mobility is limited. � There is certain demand and advantage on the exploration from higher view points and the inspection of high place infrastructures (ceiling, pipeline, power line etc..) � Battery-driven Micro Aerial Vehicles have limited operation time ( 〜 10 minutes of flight time.) � Our idea is… � Combine Ground Vehicles and MAVs � Use Ground Vehicles as a carrier and battery-charging station of MAVs.
Robot System Pelican : Micro Arial Vehicle Kenaf : Precursor ground vehicle for reconnaissance and mapping Quince : MAV carrier ground vehicle
Pelican : Micro Arial Vehicle • Battery-driven Quad-rotor robot platform sold Ascending Technologies, GmbH. • Equipped with an IMU (accelerometer, gyroscope, magnetometer) and pressure sensor • 60(w) x 60(l) x 25(h) cm, weighing about 2.0kg • Customized onboard system: 1.6GHz Atom + 1GB RAM • Hokuyo UTM-30LX (laser) + Microsoft Kinect • Communication via an 802.11n access point mounted on Quince • Autonomous lift-off and landing control • Semi-autonomous (waypoint) and manual control is possible
Kenaf : Ground vehicle for m apping HOKUYO sensor Rotational table Rotary connector Motor • Research test bed • 58(w) x 45(l) x 30(h) cm, weighing about 20 kg • Main track + 4-sub tracks • HOKUYO laser range sensor with a rotary table, 40 Hz scan freq. 30 m ranging capability • Gyro + odometry
Quince : Ground vehicle w ith a Heli-port • Research test bed • 48(w) x 112(l) x 42(h) cm, weighing about 25 kg • Main track + 4-sub tracks • Heli-port and wifi access point are mounted for Pelican.
Demo Site Electrical Engineering # 1 building of Tohoku University � Severely damaged by 3.11 earthquake � With a risk of collapse in future quakes �
Demo Site Electrical Engineering # 1 building of Tohoku University � Severely damaged by 3.11 earthquake � With a risk of collapse in future quakes �
Demo Site July 2 7 – August 1 , 2 0 1 1
Mapping result by Kenaf 9F 8F 7F
Operation (2)
Operation (3)
Operation (4)
Final Mapping Result 9F 8F 7F
Final Mapping Result 9F 8F 7F
Ground and Aerial Robots for Rapid Response: Remote Autonomous Exploration and Mapping Japanese PI: Kazuya Yoshida, Tohoku University Counterpart PI: Vijay Kumar, University of Pennsylvania Overview/purpose of the project � Develop the technology necessary to enable extensive exploration of damaged buildings by combining ground-based and aerial-flying robots. Problem and proposed solution: Ground-based robots have limitation of mobility to steep steps or walls. � Aerial robots have a very short operation time. Aerial robots are transported by ground robots and take off/land on them. � Experiments were conducted in a building that was critically damaged by � the 2011 East Japan earthquake. Results: Full 2D/3D maps of the building floors � were successfully obtained. The maps clearly show the features of the environment
Publication � Collaborative m apping of an earthquake ‐ dam aged building via ground and aerial robots Nathan Michael, Shaojie Shen, Kartik Mohta, Yash Mulgaonkar, Vijay Kumar, Keiji Nagatani, Yoshito Okada, Seiga Kiribayashi, Kazuki Otake, Kazuya Yoshida, Kazunori Ohno, Eijiro Takeuchi, Satoshi Tadokoro Journal of Field Robotics vol. 29, no. 5, pp.832-841, 2012 � A TED talk by Prof. Vijay Kumar, also broadcasted in Japan as a program “Super Presentation” by NHK-E.
Future Issues � Combination of Ground Vehicles and Micro Aerial Vehicles for investigation of disaster devastated areas is a very powerful method. � There are a number of potential applications: such as plant buildings and structures , including nuclear power plant, their exterior and interior, for regular monitoring and maintenance, and disaster response. � Rapid response to volcanic eruptions is also important application. � Development of higher degrees of autonom y to decrease the complexity of the operation, and thereby increase the safety is a priority issue for future study.
Recommend
More recommend
Unleash a World of Digital Possibilities—Browse, Share, and Explore Content Without Boundaries