Introduction to Medical Imaging rotate source-detector pair around - PowerPoint PPT Presentation
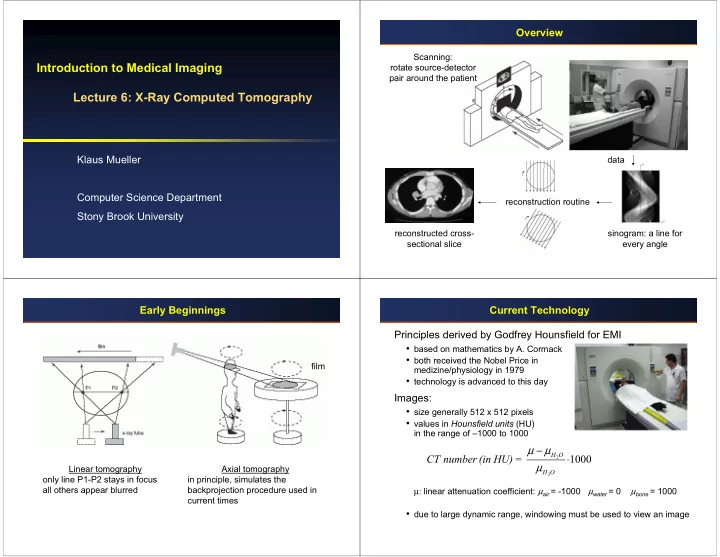
Overview Scanning: Introduction to Medical Imaging rotate source-detector pair around the patient Lecture 6: X-Ray Computed Tomography Klaus Mueller data Computer Science Department reconstruction routine Stony Brook University
Overview Scanning: Introduction to Medical Imaging rotate source-detector pair around the patient Lecture 6: X-Ray Computed Tomography Klaus Mueller data Computer Science Department reconstruction routine Stony Brook University reconstructed cross- sinogram: a line for sectional slice every angle Early Beginnings Current Technology Principles derived by Godfrey Hounsfield for EMI • based on mathematics by A. Cormack • both received the Nobel Price in film medizine/physiology in 1979 • technology is advanced to this day Images: • size generally 512 x 512 pixels • values in Hounsfield units (HU) in the range of –1000 to 1000 µ − µ H O CT number (in HU) = 1000 2 ⋅ µ Linear tomography Axial tomography H O 2 only line P1-P2 stays in focus in principle, simulates the all others appear blurred backprojection procedure used in µ: linear attenuation coefficient: µ air = -1000 µ water = 0 µ bone = 1000 current times • due to large dynamic range, windowing must be used to view an image
CT Detectors Projection Coordinate System The parallel-beam geometry at angle θ represents a new Scintillation crystal with photomultiplier tube (PMT) coordinate system ( r , s ) in which projection I θ ( r ) is acquired (scintillator: material that converts ionizing radiation into pulses of light) • rotation matrix R transforms coordinate system ( x, y ) to ( r, s ): • high QE and response time • low packing density ⎛ ⎞ ⎛ ⎞ ⎛ ⎞⎛ ⎞ r x cos sin x θ θ • PMT used only in the early CT scanners R ⎜ ⎟ = ⎜ ⎟ = ⎜ ⎟⎜ ⎟ s y sin cos y ⎝ ⎠ ⎝ ⎠ ⎝ − θ θ ⎠⎝ ⎠ Gas ionization chambers that is, all ( x , y ) points that fulfill • replace PMT r = x cos( θ ) + y sin( θ ) • X-rays cause ionization of gas molecules in chamber are on the (ray) line L (r, θ ) • ionization results in free electrons/ions • R T is the inverse, mapping • these drift to anode/cathode and yield a measurable electric signal ( r, s ) to ( x, y ) • lower QE and response time than PMT systems, but higher packing ⎛ x ⎞ ⎛ ⎞ r ⎛ cos sin ⎞⎛ ⎞ r θ − θ density T R ⎜ ⎟ = ⎜ ⎟ = ⎜ ⎟⎜ ⎟ y s sin cos s ⎝ ⎠ ⎝ ⎠ ⎝ θ θ ⎠⎝ ⎠ Scintillation crystals with photodiode • current technology (based on solid state or semiconductors) s is the parametric variable • photodiodes convert scintillations into measurable electric current along the (ray) line L (r, θ ) • QE > 98% and very fast response time Projection Projection Profile Assuming a fixed angle θ , the measured intensity at detector Each intensity profile I θ ( r ) is transformed to into an attenuation position r is the integrated density along L (r, θ ) : profile p θ ( r ): ∫ ( , ) x y ds I ( ) r − µ ∫ p r ( ) ln ( r cos s sin , r sin s cos ) ds θ = − = µ ⋅ θ − ⋅ θ ⋅ θ + ⋅ θ I ( ) r I e Lr = ⋅ , θ θ I 0 θ 0 L ∫ r , θ ( cos r s sin , sin r s cos ) ds − µ ⋅ θ − ⋅ θ ⋅ θ + ⋅ θ I e Lr = ⋅ , θ I θ ( r ) p θ ( r ) 0 For a continuous energy spectrum: ∫ ( cos r s sin , sin r s cos ) ds − µ ⋅ θ − ⋅ θ ⋅ θ + ⋅ θ ∞ ∫ I ( ) r I ( ) E e Lr = ⋅ , θ 0 θ 0 • p θ ( r ) is zero for | r |> FOV /2 ( FOV = F ield o f V iew, detector width) But in practice, is is assumed that the • p θ ( r ) can be measured from (0, 2 π ) X-rays are monochromatic • however, for parallel beam views ( π , 2 π ) are redundant, so just need to measure from (0, π )
Sinogram Radon Transform Stacking all projections (line integrals) yields The transformation of any function f ( x , y ) into p ( r , θ ) is called the sinogram, a 2D dataset p ( r , θ ) the Radon Transform p r ( , ) R f x y { ( , )} θ = ∞ ∫ f r ( cos s sin , r sin s cos ) ds = ⋅ θ − ⋅ θ ⋅ θ + ⋅ θ To illustrate, imagine an object that is −∞ a single point: The Radon transform has the following properties: • it then describes a sinusoid in p ( r , θ ): • p ( r , θ ) is periodic in θ with period 2 π p r ( , ) p r ( , 2 ) θ = θ + π • p ( r , θ ) is symmetric in θ with period π p r ( , ) p ( r , ) θ = − θ ± π projections point object sinogram Sampling (1) Sampling (2) spatial domain frequency domain In practice, we only have a limited • number of views, M • number of detector samples, N projection p θ ( r ) • for example, M =1056, N =768 This gives rise to a discrete sinogram p ( n Δ r , m Δθ ) • a matrix with M rows and N columns * Δ r is the detector sampling distance Δθ is the rotation interval between subsequent views sinc • assume also a beam of width Δ s beam aperture Δ s function Δ r Sampling theory will tell us how to Δ s choose these parameters for a given desired object resolution smoothed projection 1 / Δ s Δ θ
Sampling (3) Limiting Aliasing spatial domain frequency domain Aliasing within the sinogram lines (projection aliasing): • to limit aliasing, we must separate the aliases in the frequency domain (at least coinciding the zero-crossings): smoothed projection 1 2 s Δ r ≥ → Δ ≤ r s 2 Δ Δ . • thus, at least 2 samples per beam are required Δ k Δθ Aliasing across the sinogram lines sampling at Δ r k max =1/ Δ r (angular aliasing): k M : number of views, evenly π sinogram in the frequency max Δ θ = distributed around the semi-circle M domain (2 projections with N =12 N : number of detector samples, k 1 / Δ r samples each are shown) max k give rise to N frequency domain Δ = sampled projection N / 2 samples for each projection k k N π for uniform sampling: k max max M Δ θ = Δ → = → = π 1 / Δ s M N / 2 2 Reconstruction: Concept Backprojection: Illustration Given the sinogram p ( r , θ ) we want to recover the object described in ( x , y ) coordinates Recall the early axial tomography method • basically it worked by subsequently “smearing” the acquired p ( r , θ ) across a film plate • for a simple point we would get: This is called backprojection : π ∫ b x y ( , ) B p r { ( , )} p x ( cos y sin , ) d = θ = ⋅ θ + ⋅ θ θ θ 0
Backprojection: Practical Considerations The Fourier Slice Theorem A few issues remain for practical use of this theory: To understand the blurring we need more theory � the Fourier Slice Theorem or Central Slice Theorem • we only have a finite set of M projections and a discrete array of N pixels ( x i , y j ) • it states that the Fourier transform P ( θ , k ) of M a projection p ( r , θ ) is a line across the origin of ∑ b x y ( , ) B p r { ( , )} p x ( cos y sin , ) = θ = ⋅ θ + ⋅ θ θ the Fourier transform F ( k x , k y ) of function f ( x , y ) i j n m i m j m m m 1 = ray pixel polar grid • to reconstruct a pixel ( x i , y j ) there may not be a ray p ( r n , θ n ) (detector sample) in A possible reconstruction procedure would then: the projection set detector • calculate the 1D FT of all projections p ( r m , θ m ), which gives rise to � this requires interpolation (usually samples F ( k x , k y ) sampled on a polar grid (see figure) linear interpolation is used) • resample the polar grid into a cartesian grid (using interpolation) • perform inverse 2D FT to obtain the desired f ( x , y ) on a cartesian grid interpolation However, there are two important observations: • the reconstructions obtained with the simple backprojection appear • interpolation in the frequency domain leads to artifacts blurred (see previous slides) • at the FT periphery the spectrum is only sparsely sampled Filtered Backprojection: Concept Filtered Backprojection: Equation and Result To account for the implications of these two observations, we 1D Fourier ramp-filtering modify the reconstruction procedure as follows: transform of p ( r , θ ) � P ( k , θ ) • filter the projections to compensate for the blurring • perform the interpolation in the spatial domain via backprojection π ∞ ∫ ∫ i 2 kr f x y ( , ) ( P k ( , ) k e π dk d ) = θ ⋅ ⋅ θ � hence the name Filtered Backprojection 0 −∞ Filtering -- what follows is a more practical explanation (for formal proof see the book): inverse 1D Fourier transform � p ( r , θ ) • we need a way to equalize the contributions of all frequencies in the backprojection for all angles FT’s polar grid ramp • this can be done by multiplying each P ( θ , k ) by a ramp function � this way the magnitudes of the existing higher-frequency samples in each Recall the previous (blurred) projection are scaled up to compensate for backprojection illustration their lower amount • now using the filtered projections: • the ramp is the appropriate scaling function since the sample density decreases linearly towards the FT’s periphery not filtered filtered
Recommend








More recommend
Explore More Topics
Stay informed with curated content and fresh updates.