Inhomogeneous Continuity Equation with Application to Hamiltonian - PowerPoint PPT Presentation
Inhomogeneous Continuity Equation with Application to Hamiltonian ODE (joint work with L. Chayes & W. Gangbo) Helen K. Lei UCLA December 7, 2009 Preliminaries Continuity Equation Lagrangian Description Wasserstein Distance
Inhomogeneous Continuity Equation with Application to Hamiltonian ODE (joint work with L. Chayes & W. Gangbo) Helen K. Lei UCLA December 7, 2009
Preliminaries ◦ Continuity Equation ◦ Lagrangian Description ◦ Wasserstein Distance ◦ A.C. Continuous Curves and the Continuity Equation Motivation ◦ Hamiltonian ODE ◦ Mass Reaching Infinity in Finite Time ◦ Regularization: Fade With Arc Length Inhomogeneous Continuity Equation ◦ Inhomogeneous Continuity Equation ◦ A Distance for Measures ◦ Continuity of Dynamics ◦ Application to Hamiltonian ODE
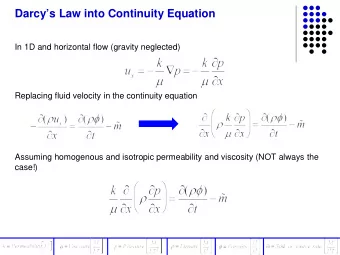
Continuity Equation I ∂ρ ∂ t + ∇ · ( ρ v ) = 0 V ρ = (probability) density v = velocity field △ in mass = flux in/out of volume: � ∂ρ dM V � � = ∂ t dt = − V ∇ · ( ρ v ) dx = − ∂ V ρ v · ˆ n dS dt
Continuity Equation II l dM V = 0 if the supp( ρ ) ≺ V dt supp( ρ ) For measures: V ∂ t µ t + ∇ · ( µ t v t ) = 0 in the weak sense: � T c ( R d × (0 , T )) � ∀ ϕ ∈ C ∞ ∂ t ϕ + � v t , ∇ ϕ � d µ t dt = 0 0
Lagrangian Description I Eulerian: v t µ 1 µ 0 Given v t , have flow equation: ˙ X t = v t ( X t ) X 0 = id X t
Lagrangian Description II or for any test function ϕ ∈ L 1 ( d ν ) (Here T # µ = ν if for Define R R any measurable A ϕ ( y ) d ν ( y ) = ϕ ( T ( x )) d µ ( x ) ) µ t = X t # µ 0 ν ( A ) = µ ( T − 1 ( A )) Then (formally), { µ t } t ∈ [0 , T ] satisfy the continuity equation: c ( R d × (0 , T )); ϕ ∈ C ∞ Ψ( x , t ) = ϕ ( X t ( x ) , t ) Z T Z R d ∂ t ϕ ( x ) + � v t ( x ) , ϕ ( x ) � d µ t ( x ) dt 0 Z T Z = R d ∂ t ϕ ( X t ( x ) , t ) + � v t ( X t ( x ) , ∇ ϕ ( X t ( x )) � d µ 0 ( x ) dt 0 Z T Z d Ψ = dt ( x , t ) d µ 0 ( x ) dt R d 0 Z = R d ϕ ( X T ( x ) , T ) − ϕ ( x , 0) d µ 0 ( x ) = 0
Wasserstein Distance M ∗ M (flow map) (density) Φ# ρ 0 = ρ ← Φ : Π ρ 0 Φ ρ g ∗ R R Φ ( v 1 , v 2 ) = ( v 1 · v 2 ) ρ 0 s = −∇ · ( ρ ∇ p ); g ρ ( s 1 , s 2 ) = ρ ∇ ρ 1 · ρ 2 (flat) (non-flat) (Induced distance: x 0 x 1 R 1 d ( x 0 , x 1 ) 2 = inf { 0 g x ( t ) ( dx dt , dx dt ) dt : t �→ x ( t ) ∈ M ′ , x (0) = x 0 , x (1) = x 1 } ) Upshot: F. Otto. The geometry of dissipative evolution eqns: d ( ρ 0 , ρ ) 2 = inf Φ: ρ =Φ# ρ 0 the porous medium equation. � ρ 0 | id − Φ | 2 Comm. PDE, 26 (2001), 101-174.
A.C. Curves and the Continuity Equation Definition. Let P 2 ( R d , W 2 ) denote the space of probability measures with bounded second moment equipped with the Wasserstein distance (Z ) W 2 R d × R d | x − y | 2 d γ ( x , y ) : γ ∈ Γ( µ, ν ) 2 ( µ, ν ) = min and Γ( µ, ν ) = { γ : γ ( A × R d ) = µ ( A ) and γ ( R d × B ) = ν ( B ) , for all measurable A and B } Theorem. There is a correspondence: { A.C. curves in P 2 ( R d , W 2 ) } ⇐ ⇒ { velocity fields v t ∈ L 2 ( d µ t ) } via 1 ∂ t µ t + ∇ · ( v t µ t ) = 0 and lim | h | W 2 ( µ t + h , µ t )( ≤ ) = � v t � L 2 ( µ t ) h → 0 Thus Z 1 ff W 2 � v t � 2 2 ( µ 0 , µ 1 ) = min L 2 ( d µ t ) : ∂ t µ t + ∇ · ( v t µ t ) = 0 0 and L 2 ( d µ ) T µ P 2 ( R d , W 2 ) = {∇ ϕ : ϕ ∈ C ∞ c ( R d ) }
Hamiltonian ODE I Hamiltonian Dynamics. R 2 d ∋ x = ( p , q ) = (momentum, position) 1 | p | 2 + Φ( q ) E.g., H ( p , q ) = 2 ! ! ! p ˙ 0 − Id H p x = ˙ = = J ∇ H q ˙ Id 0 H q Start with measure, infinite dimensional Hamiltonian system? Definition (Hamiltonian ODE). H : P 2 ( R 2 d ) → ( −∞ , ∞ ] (proper, lowersemicontinuous) . A.C. curve { µ t } [0 , T ] is Hamiltonian ODE w.r.t. H if ∃ v t ∈ L 2 ( d µ t ) , � v t � L 2 ( d µ t ) ∈ L 1 (0 , T ) L. Ambrosio and W. Gangbo. Hamiltonian ODE’s in the Wasserstein Space of Probability Measures. Comm. in Pure and Applied Math., 61 , 18–53 (2007). such that 8 W. Gangbo, H. K. Kim, and T. Pacini. Differ- ∂ t µ t + ∇ · ( J v t µ t ) = 0 , µ 0 = µ, t ∈ (0 , T ) ential forms on Wasserstein space and infinite < dimensional Hamiltonian systems. To appear in Memoirs of AMS. v t ∈ T µ t P 2 ( R 2 d ) ∩ ∂ H ( µ t ) for a.e., t :
Hamiltonian ODE II Example. H ( µ ) = 1 � � Φ( q ) d µ + 1 � | p | 2 d µ + ( W ∗ µ )( q ) d µ 2 2 ∇ H ( µ ) = ( p , − ( ∇ W ∗ µ + Φ)( q )) Theorem. (Ambrosio, Gangbo) Suppose H : P 2 ( R 2 d ) → R satisfies ♣|∇ H ( x ) | ≤ C (1 + | x | ) ◦ If µ n = ρ n L 2 d , µ = ρ L 2 d and µ n ⇀ µ then ∇ H ( µ n k ) µ n k ⇀ ∇ H ( µ ) µ Then given µ = ρ L 2 d : ◦ The Hamiltonian ODE admits a solution for t ∈ [0 , T ] ◦ t �→ µ t is L –Lipschitz ◦ If H is λ –convex, then H ( µ t ) = H ( µ ).
Mass Reaching Infinity in Finite Time Condition ( ♣ ). What about other We are solving Hamiltonians? E.g., ∂ t µ t + ∇ · ( J ∇ H µ t ) = 0; v t := J ∇ H ( µ t ) Φ( q ) Recall characteristics ˙ q X t = v t ( X t ); X 0 = id ⇒ | X t | � e Ct (1 + | X 0 | ): | v t ( x ) | ≤ C (1 + | x | ) = preserves compact support, second moment... Explicit Computation. | v t ( X t ) | = C (1 + | X t | ) R , R > 1 ! R − 1 | X t | 1 = 1 − t ( R − 1) | X 0 | R − 1 | X 0 | 1 x � ∞ at time τ ( x ) = ( R − 1) | x | R − 1 < ∞
Regularization: Fade With Arc Length R t ˙ M t = M 0 e − 0 C s ( X s ) | v s ( X s ) | ds X t = v t ( X t ) For simplicity, C s := ε
Inhomogeneous Continuity Equation ∂µ t ( ♠ ) ∂ t + ∇ · ( v t µ t ) = − ε | v t | µ t Given µ 0 , v t , define µ ∗ t µ ∗ t = X t # µ 0 µ t � t R t ( X t ) = exp( − ε | v t ( X s ) ds ) µ 0 0 then µ t = R t µ ∗ t satisfies ( ♠ ). Proposition. ( ♠ ) preserves α –exponential moments for α ≤ ε , since distance tranveled ≤ arclength
A Distance for Measures I Observation. If D 1 and D 2 are distances, then so is D ′ = � D 2 1 + D 2 2 . Fix ε > 0 and consider µ t µ ∗ M ∞ ,ε ( R 2 d , B 2 ): t µ t { (positive) Borel measures µ 0 with ε –exponential moment } with distance B 2 2 ( µ, ν ) = W 2 2 ( µ, ν ) + ( M µ − M ν ) 2
A Distance for Measures II Geodesics of B 2 . Geodesic in ( P 2 , W 2 ) + linear decay of mass µ t µ ∗ | µ ′ | ( t ) = W 2 ( µ 0 , µ 1 ) t ˙ M t = | M 1 − M 0 | µ t µ t µ 0 µ 0 � | µ ′ | ( t )) 2 + ( ˙ | µ ′ | ( t ) = M t ) 2
Continuity Of Dynamics I Example. H¨ older–1/2 Continuity; moment assumption needed. µ 0 µ h µ h 1 / 2 1 / 2 1 / 2(1 + κ h ) D D D 1 / 2 1 / 2 − κ h 1 / 2(1 − κ h ) √ W 2 = D κ h
Continuity of Dynamics II Lemma. Let µ 0 ∈ M ∞ ,ε . Let us assume that we have (time–dependent) velocity fields v t satisfying | v t ( x ) | ≤ C (1 + | x | ) R for some constants C , R > 0. Then if ( µ ε t ) t ∈ [0 , T ] is a solution to ∂µ ε ∂ t + ∇ · ( v t µ ε t t ) = − ε | v t | µ ε t , ∃ ( C , R , ε )–dependent constant G < ∞ such that ∀ t , t + h ∈ [0 , T ] with h < h 0 for some h 0 > 0 sufficiently small √ B 2 ( µ ε t , µ ε t + h ) ≤ GM ∞ ,ε ( µ 0 ) h
Application to Hamiltonian ODE I Theorem. (Chayes, Gangbo, L.) Fix ε > 0 and T > 0. Suppose H : M ∞ ,ε → R and v µ := J ∇ H ( µ ) satisfies ◦ v µ ( x ) ≤ C (1 + | x | ) R ◦ If µ n ⇀ µ narrowly, then µ n v µ n → µ v µ Then given µ 0 ∈ M ∞ ,ε , there exists a solution to ∂µ ε ∂ t + ∇ · ( v t µ ε t t ) = − ε | v t | µ ε t ∈ [0 , T ] t , with v ε t = J ∇ H ( µ ε t ) . Furthermore, there exists ε → 0 limiting measures { µ t } t ∈ [0 , T ] .
Application to Hamiltonian ODE II Current Work. ◦ Appropriate limiting measures satisfy the continuity equation. ◦ Dependence on limiting procedure. ◦ Appropriate conservation laws (mass, energy, etc.). Questions. ◦ Different inhomogeneous equation? ◦ Different distance? ◦ Relation between the two? ◦ Physical systems of relevance?
Thank you
Recommend







More recommend
Explore More Topics
Stay informed with curated content and fresh updates.