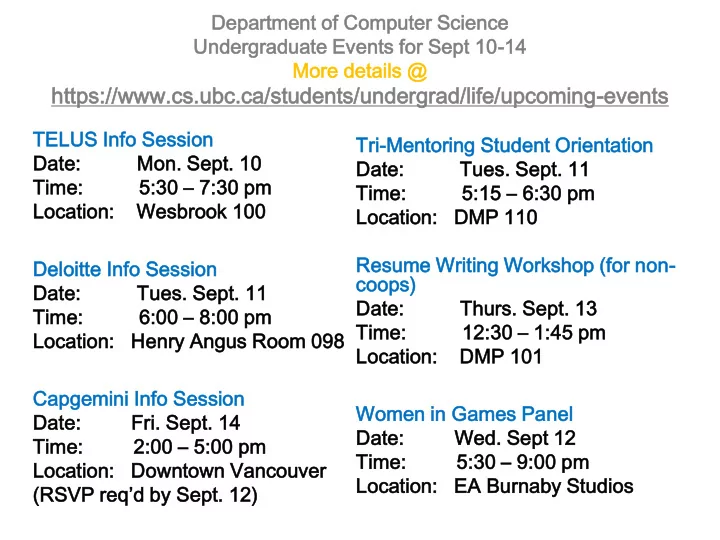

Departme partment nt of Computer puter Science nce Undergr dergrad aduat uate e Events ts for Sept 10-14 14 Mor
- re
e details ls @
https ps://ww ://www.cs.ub w.cs.ubc. c.ca ca/s /stud tudent ents/ s/und under ergra grad/l d/life ife/up /upco comin ming-ev event ents
TELUS US Info Sessi sion
- n
Date: e:
- Mon. Sept. 10
Time: e: 5:30 – 7:30 pm Locati cation
- n: Wesb
sbroo
- ok 100
100 Deloitt
- itte
e Info Se Sess ssion
- n
Date: e: Tues.
- s. Sept. 11
Time: e: 6:00 – 8:00 pm Locati cation
- n: Henr
nry y Angus us Room m 098 Capgem pgemini ini Info Sessio sion Date:
- Fri. Sept. 14
Time: e: 2:00 – 5:00 pm Loca cation
- n: Downtown
ntown Va Vancou couver ver (RSVP SVP req’d by Sept. 12) Tri-Me Ment ntori
- ring
ng Student ent Orientatio ntation Date: e: Tues.
- s. Sept. 11
Time: e: 5 5:15 – 6:30 pm Locati cation
- n: DMP 110
Resu sume e Writing ing Work rkshop shop (for r non- coop
- ps)
s) Date: e: Thur urs.
- s. Sept. 13
Time: e: 12:30 0 – 1:45 pm Locati cation
- n: DMP 101
101 Wome men n in Games es Panel Date: e: Wed. . Se Sept 12 Time: e: 5:30 – 9:00 pm Locati cation
- n: EA Bu
Burna naby by Studios
- s