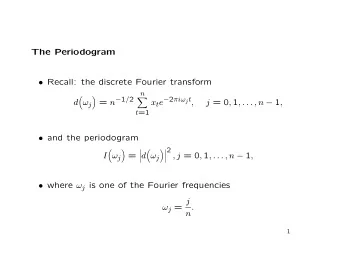
H ( s ) h ( t ) x ( t ) y ( t ) x ( t ) y ( t ) Compare & - PowerPoint PPT Presentation
Overview of Continuous-Time Fourier Transform Topics Core Concepts Review Definition H ( s ) h ( t ) x ( t ) y ( t ) x ( t ) y ( t ) Compare & contrast with Laplace transform Laplace transform enables us to find the transient and
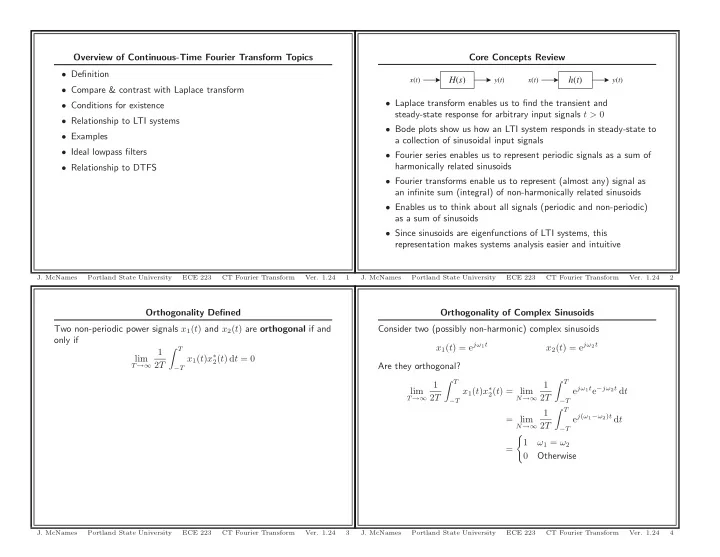
Overview of Continuous-Time Fourier Transform Topics Core Concepts Review • Definition H ( s ) h ( t ) x ( t ) y ( t ) x ( t ) y ( t ) • Compare & contrast with Laplace transform • Laplace transform enables us to find the transient and • Conditions for existence steady-state response for arbitrary input signals t > 0 • Relationship to LTI systems • Bode plots show us how an LTI system responds in steady-state to • Examples a collection of sinusoidal input signals • Ideal lowpass filters • Fourier series enables us to represent periodic signals as a sum of harmonically related sinusoids • Relationship to DTFS • Fourier transforms enable us to represent (almost any) signal as an infinite sum (integral) of non-harmonically related sinusoids • Enables us to think about all signals (periodic and non-periodic) as a sum of sinusoids • Since sinusoids are eigenfunctions of LTI systems, this representation makes systems analysis easier and intuitive J. McNames Portland State University ECE 223 CT Fourier Transform Ver. 1.24 1 J. McNames Portland State University ECE 223 CT Fourier Transform Ver. 1.24 2 Orthogonality Defined Orthogonality of Complex Sinusoids Two non-periodic power signals x 1 ( t ) and x 2 ( t ) are orthogonal if and Consider two (possibly non-harmonic) complex sinusoids only if x 1 ( t ) = e jω 1 t x 2 ( t ) = e jω 2 t � T 1 x 1 ( t ) x ∗ lim 2 ( t ) d t = 0 2 T Are they orthogonal? T →∞ − T � T � T 1 1 e jω 1 t e − jω 2 t d t x 1 ( t ) x ∗ lim 2 ( t ) = lim 2 T 2 T T →∞ N →∞ − T − T � T 1 e j ( ω 1 − ω 2 ) t d t = lim 2 T N →∞ − T � 1 ω 1 = ω 2 = 0 Otherwise J. McNames Portland State University ECE 223 CT Fourier Transform Ver. 1.24 3 J. McNames Portland State University ECE 223 CT Fourier Transform Ver. 1.24 4
Importance of Orthogonality Workspace Suppose that we know a signal is composed of a linear combination of � ∞ � T � � = 1 non-harmonic complex sinusoids e j ( ω − ω o ) t d t X (e jω ) lim d ω 2 π T →∞ � ∞ −∞ − T x ( t ) = 1 X (e jω ) e jωt d ω � ∞ e j ( ω − ω o ) T − e − j ( ω − ω o ) T = 1 � � 2 π X (e jω ) −∞ lim d ω 2 π j ( ω − ω o ) T →∞ −∞ How do we solve for the coefficients X (e jω ) ? � ∞ � � = 1 T →∞ 2sin[( ω − ω o ) T ] X (e jω ) lim d ω � T 2 π ω − ω o x ( t )e − jω o t d t −∞ lim � ∞ = 1 T →∞ − T X (e jω ) 2 π δ ( ω − ω o ) d ω � 1 � T � ∞ 2 π � X (e jω ) e jωt d ω e − jω o t d t −∞ = lim � ∞ 2 π T →∞ − T −∞ X (e jω ) δ ( ω − ω o ) d ω = � ∞ � T � � = 1 −∞ e jωt e − jω o t d t X (e jω ) lim d ω = X (e jω o ) 2 π T →∞ −∞ − T J. McNames Portland State University ECE 223 CT Fourier Transform Ver. 1.24 5 J. McNames Portland State University ECE 223 CT Fourier Transform Ver. 1.24 6 Definition and Comments Mean Squared Error � + ∞ � + ∞ x ( t ) e − jωt d t x ( t ) e − jωt d t X ( jω ) � X ( jω ) � F { x ( t ) } = F { x ( t ) } = −∞ −∞ � + ∞ � + ∞ x ( t ) � 1 x ( t ) � 1 F − 1 { X ( jω ) } X ( jω ) e jωt d ω F − 1 { X ( jω ) } X ( jω ) e jωt d ω = = ˆ 2 π 2 π −∞ −∞ � + T 1 x ( t ) | 2 d t MSE = lim | x ( t ) − ˆ FT • Denote relationship as x ( t ) ⇐ ⇒ X ( jω ) 2 T T →∞ − T • X ( jω ) can be thought of as a density of x ( t ) at the frequency ω • Like the Fourier series, it can be shown that if the transform • Used to characterize LTI systems and to analyze signals converges, X ( jω ) minimizes the MSE over all possible functions • Some books & engineers define it differently of ω • Most ECE texts use the same definition we are using • Like the other transforms, the error converges to zero • We will use this definition exclusively • Like the CTFS, MSE = 0 does not imply x ( t ) = ˆ x ( t ) for all t • The functions may differ at points of discontinuity J. McNames Portland State University ECE 223 CT Fourier Transform Ver. 1.24 7 J. McNames Portland State University ECE 223 CT Fourier Transform Ver. 1.24 8
Example 4: Applying the Definition Compare & Contrast with Laplace Transform Find the Fourier transform of x ( t ) = δ ( t ) . � + ∞ � ∞ x ( t ) = 1 x ( t )e − jωt d t X ( jω )e jωt d ω X ( jω ) = 2 π −∞ −∞ � ∞ � σ 1 + j ∞ 1 0 − x ( t )e − st d t X ( s )e st d s X ( s ) = x ( t ) u ( t ) = 2 πj σ 1 − j ∞ Unlike the Laplace transform, - FT has no mechanism to accommodate initial conditions - FT is more difficult to find the transient response - FT does not converge for as many signals (e.g., e t u ( t ) ) + FT can be applied to two-sided signals ( x ( t ) � = 0 for t ≤ 0 ) + FT is easier for steady-state problems + FT provides more insight for analysis of frequency content J. McNames Portland State University ECE 223 CT Fourier Transform Ver. 1.24 9 J. McNames Portland State University ECE 223 CT Fourier Transform Ver. 1.24 10 Conditions for Existence Fourier Transform & Transfer Functions The Fourier transform of a signal x ( t ) exists if � M k =0 b k ( jω ) k Y ( jω ) = k =1 a k ( jω ) k X ( jω ) = H ( jω ) X ( jω ) � + ∞ 1 + � N | x ( t ) | 2 d t < ∞ −∞ • The time-domain relationship of y ( t ) and x ( t ) can be complicated and any discontinuities are finite • In the frequency domain, the relationship of Y ( jω ) to X ( jω ) of • True for all signals of finite amplitude and duration LTI systems described by differential equations simplifies to a • Do periodic signals have a Fourier transform? rational function of ( jω ) • No, but we can still apply the transform if we allow X ( jω ) to be • The numerator/denomenator sums are not Fourier series expressed in terms of impulse functions • For real systems, H ( jω ) is usually a rational ratio of two • This requires the trick of using limits polynomials • As with CTFS, convergence does not imply that the inverse • H ( jω ) is the discrete-time transfer function Fourier transform will recover the signal • Specifically, the transfer function of an LTI system can be defined • However, will be equal at all points except for discontinuities as the ratio of Y ( jω ) to X ( jω ) • Separate sufficient conditions (Dirichlet) are stated in the text • Same story as the continuous-time case J. McNames Portland State University ECE 223 CT Fourier Transform Ver. 1.24 11 J. McNames Portland State University ECE 223 CT Fourier Transform Ver. 1.24 12
Example 5: Relationship to CT LTI Systems Example 5: Workspace Suppose the impulse response h ( t ) is known for an LTI CT system. Derive the relationship between a sinusoidal input signal and the output of the system. J. McNames Portland State University ECE 223 CT Fourier Transform Ver. 1.24 13 J. McNames Portland State University ECE 223 CT Fourier Transform Ver. 1.24 14 Example 6: Transform of a Decaying Exponential Example 6: Workspace Let x ( t ) = e − at u ( t ) where Re { a } > 0 . Does the Fourier transform of x ( t ) exist? Find the Fourier transform (use a limit, if necessary). J. McNames Portland State University ECE 223 CT Fourier Transform Ver. 1.24 15 J. McNames Portland State University ECE 223 CT Fourier Transform Ver. 1.24 16
Example 6: Fourier Transform Example 6: MATLAB Code function [] = DecayingExponential(); e − 1.0t u(t) a = 1; 1 w = -20:0.1:20; X = 1./(a + j*w); |X(j ω )| FigureSet(1,’LTX’); subplot(2,1,1); 0.5 h = plot(w,abs(X)); set(h,’LineWidth’,1.5); ylabel(’|X(j\omega)|’); title(sprintf(’e^{-%5.1ft} u(t)’,a)); ylim([0 1.1]); 0 box off; −20 −15 −10 −5 0 5 10 15 20 AxisLines; subplot(2,1,2); h = plot(w,angle(X)*180/pi); 100 set(h,’LineWidth’,1.5); ylabel(’\angle X(j\omega)’); xlabel(’Frequency (rad/s)’); 50 box off; ∠ X(j ω ) AxisLines; AxisSet(8); 0 print -depsc DecayingExponential; −50 −100 −20 −15 −10 −5 0 5 10 15 20 Frequency (rad/s) J. McNames Portland State University ECE 223 CT Fourier Transform Ver. 1.24 17 J. McNames Portland State University ECE 223 CT Fourier Transform Ver. 1.24 18 Example 7: Transform of a Pulse Example 7: Workspace Does the Fourier transform of p T ( t ) defined below exist? Find the Fourier transform (use a limit if necessary). � 1 | t | < T p T ( t ) = 0 Otherwise J. McNames Portland State University ECE 223 CT Fourier Transform Ver. 1.24 19 J. McNames Portland State University ECE 223 CT Fourier Transform Ver. 1.24 20
Example 7: Pulse Spectrum Example 7: MATLAB Code Pulse Fourier Transform for T = 1 2 1.5 1 X(j ω ) 0.5 0 −0.5 −60 −40 −20 0 20 40 60 Frequency (rad/s) J. McNames Portland State University ECE 223 CT Fourier Transform Ver. 1.24 21 J. McNames Portland State University ECE 223 CT Fourier Transform Ver. 1.24 22 Example 8: Inverse Transform of a Pulse Example 8: Workspace Solve for the signal x ( t ) , given X ( jω ) below. � 1 | ω | < W X ( jω ) = 0 Otherwise J. McNames Portland State University ECE 223 CT Fourier Transform Ver. 1.24 23 J. McNames Portland State University ECE 223 CT Fourier Transform Ver. 1.24 24
Recommend






More recommend
Explore More Topics
Stay informed with curated content and fresh updates.