Grbner Bases: a Tools for Cryptology Jean-Charles Faugre PolSys - - PowerPoint PPT Presentation
Grbner Bases: a Tools for Cryptology Jean-Charles Faugre PolSys - INRIA/UPMC ECRYPT II Summer School on Tools 2012 Plan Grbner Bases: a Tools for Cryptology Introduction to Algebraic Cryptanalysis and Grbner bases. Part I
F5: compute Groebner ( � f 1 , . . . , f k � ) , d + 1 ) Matrix in degree d m 1 m 2 m 3 m 4 m 5 . . . u 1 f 1 1 x x x x . . . . ... Matrix in degree d + 1 . . 0 x x x . . . u r 1 f 1 0 0 1 x x t 1 t 2 t 3 t 4 t 5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . v rk − 1 f k − 1 0 0 1 x x . . . . . . w 1 x j f k 0 1 x x x . . . w 1 x j + 1 f k 0 0 1 x x w 1 f k 0 0 0 1 x . . . . . . . . . . . . . w 2 f k 0 0 0 0 1 . . . . . . . . . . . . . . . . . w 1 x n f k 0 0 0 1 x . . . . α j w 1 = x α 1 if · · · x . 1 j . . . .
F5: compute Groebner ( � f 1 , . . . , f k � ) , d + 1 ) Matrix in degree d m 1 m 2 m 3 m 4 m 5 . . . u 1 f 1 1 x x x x . . . . ... Matrix in degree d + 1 . . 0 x x x . . . u r 1 f 1 0 0 1 x x t 1 t 2 t 3 t 4 t 5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . v rk − 1 f k − 1 0 0 1 x x . . . . . . w 1 x j f k 0 1 x x x . . . w 1 x j + 1 f k 0 0 1 x x w 1 f k 0 0 0 1 x . . . . . . . . . . . . . w 2 f k 0 0 0 0 1 . . . . . . . . . . . . . . . . . w 1 x n f k 0 0 0 1 x . . . . α j w 1 = x α 1 if · · · x . 1 j . . . . Remove w 1 x j + 1 f k iff w 1 x j + 1 ∈ LT ( � f 1 , . . . , f k − 1 � )
F5: compute Groebner ( � f 1 , . . . , f k � ) , d + 1 ) Matrix in degree d m 1 m 2 m 3 m 4 m 5 . . . u 1 f 1 1 x x x x . . . . ... Matrix in degree d + 1 . . 0 x x x . . . u r 1 f 1 0 0 1 x x t 1 t 2 t 3 t 4 t 5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . v rk − 1 f k − 1 0 0 1 x x . . . . . . w 1 x j f k 0 1 x x x . . . w 1 x j + 1 f k 0 0 1 x x w 1 f k 0 0 0 1 x . . . . . . . . . . . . . w 2 f k 0 0 0 0 1 . . . . . . . . . . . . . . . . . w 1 x n f k 0 0 0 1 x . . . . α j w 1 = x α 1 if · · · x . 1 j . . . . Remove w 1 x j + 1 f k iff w 1 x j + 1 ∈ LT ( Groebner ( � f 1 , . . . , f k − 1 � ) , d − 1 )
Structure inside Gröbner basis computation F 4 / F 5 algorithms develop specifjc linear algebra algorithms and implementations. linear algebra: a key step for Gröbner bases � take into account the specific properties of the matrices. Minrank: [Issac 2010] 935s − → [Pasco 2010] 73s
Sparse and Fast FGLM joint work with C. Mou, L. Huot, P. Gaudry, PJ Spaenlehauer Use the sparsity Fast asymptotic version of FGLM
FGLM - Bottleneck with C. Mou Input System Buchberger F 4 / F 5 rely on linear algebra Gröbner Basis: total degree FGLM: ≈ minimal polynomial Bottleneck! of some matrix Gröbner Basis: lexicographical
FGLM - Bottleneck with C. Mou Input System Buchberger F 4 / F 5 rely on linear algebra Gröbner Basis: total degree FGLM: ≈ minimal polynomial Bottleneck! of some matrix Gröbner Basis: lexicographical MinRank(9,7,4) MinRank(9,8,5) Random(14, 2) Random(15, 2) Magma 2 14 2 15 D 4116 14112 Step 1 208.1s 3343.5s 7832.4s 74862.9s Step 2 1360.4s > 1 day 84374.6s > 15 days
FGLM - Bottleneck with C. Mou Input System Buchberger F 4 / F 5 rely on linear algebra Gröbner Basis: total degree FGLM: ≈ minimal polynomial Bottleneck! of some matrix Gröbner Basis: lexicographical MinRank(9,7,4) MinRank(9,8,5) Random(14, 2) Random(15, 2) Magma 2 14 2 15 D 4116 14112 Step 1 208.1s 3343.5s 7832.4s 74862.9s Step 2 1360.4s > 1 day 84374.6s > 15 days Goal : a faster algorithm for the change of ordering
FGLM in a nutshell Input: some Gröbner basis G 1 of I for some order < 1 D is the number of solutions NormalForm ( f ) = 0 ⇔ f ∈ I Step 1: Compute B = [ b 1 , . . . , b D ] , the canonical basis of K [ x 1 , . . . , x n ] / � G 1 � ordered according to < 1 Step 2: Construct multiplication matrices T i Multiplication matrix by x i : ( D × D ) -matrix represent: b j �− → NormalForm ( x i b j ) , j = 1 , . . . , D . ◮ change of ordering ⇋ linear algebra on T i
FGLM in a nutshell Step 3: Handles terms in K [ x 1 , . . . , x n ] one by one according to < 2
FGLM in a nutshell Step 3: Handles terms in K [ x 1 , . . . , x n ] one by one according to < 2 coordinate vector monomial x s v s = T s 1 1 ∙ ∙ ∙ T s n ⇒ n 1 , = s = ( s 1 , . . . , s n ) where 1 = ( 1 , 0 , . . . , 0 ) t x k ⇒ = T k 1 1 1
FGLM in a nutshell Step 3: Handles terms in K [ x 1 , . . . , x n ] one by one according to < 2 coordinate vector monomial x s v s = T s 1 1 ∙ ∙ ∙ T s n ⇒ n 1 , = s = ( s 1 , . . . , s n ) where 1 = ( 1 , 0 , . . . , 0 ) t x k ⇒ = T k 1 1 1 a polynomial in G 2 a linear dependency f = � � s c s x s ⇐ = s c s v s = 0 � � i λ i x k 1 ∈ I ⇐ = i λ i T k 1 1 = 0
FGLM in a nutshell Step 3: Handles terms in K [ x 1 , . . . , x n ] one by one according to < 2 coordinate vector monomial x s v s = T s 1 1 ∙ ∙ ∙ T s n ⇒ n 1 , = s = ( s 1 , . . . , s n ) where 1 = ( 1 , 0 , . . . , 0 ) t x k ⇒ = T k 1 1 1 a polynomial in G 2 a linear dependency f = � � s c s x s ⇐ = s c s v s = 0 � � i λ i x k 1 ∈ I ⇐ = i λ i T k 1 1 = 0 � change of ordering ⇋ linear algebra � O ( nD 3 ) : Gaussian elimination
Sparse FGLM: Key observation 1 with C. Mou T 1 , . . . , T n are sparse, especially T 1 . DLP MinRank Cyclic10 Edwards (9,9,6) D 4096 34940 41580 Sparsity 3.4% 1.0% 16% Random(3, 14) Random(3, 40) D 2744 64000 Sparsity 4.2% 1.6% T 1 for Random(3, 10): 1000 × 1000, 6 . 86 %
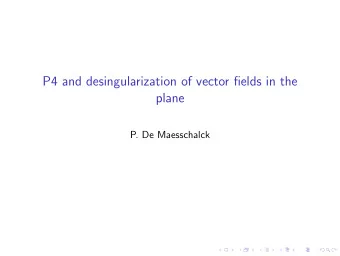
Sparse FGLM: Key observation 1 with C. Mou T 1 , . . . , T n are sparse, especially T 1 . DLP MinRank Cyclic10 Edwards (9,9,6) D 4096 34940 41580 Sparsity 3.4% 1.0% 16% Random(3, 14) Random(3, 40) D 2744 64000 Sparsity 4.2% 1.6% Theorem (F., Mou, 2011) n is fixed. For generic polynomial systems of degree d: � 6 1 T 1 for Random(3, 10): 1000 × 1000, 6 . 86 % % of nonzero entries ∼ d →∞ 1 π d n 2
Density: theoretical bound vs practice Density of T 1 10% Random equations of degree d in 3 variables Theoretical bound 5% 3% Experimental Sparsity 1% d 10 20 30 40
First case: Shape position case Assume that I is in shape position: Shape position [Becker, Mora, Marinari, and Traverso 1994] Ideal I ⊂ K [ x 1 , . . . , x n ] is in shape position if its Gröbner basis w.r.t. LEX ( x 1 < ∙ ∙ ∙ < x n ) is of the form [ f 1 ( x 1 ) , x 2 − f 2 ( x 1 ) , . . . , x n − f n ( x 1 )] .
First case: Shape position case Shape position [Becker, Mora, Marinari, and Traverso 1994] Ideal I ⊂ K [ x 1 , . . . , x n ] is in shape position if its Gröbner basis w.r.t. LEX ( x 1 < ∙ ∙ ∙ < x n ) is of the form [ f 1 ( x 1 ) , x 2 − f 2 ( x 1 ) , . . . , x n − f n ( x 1 )] . Recover f 1 : Wiedemann algorithm Construct s = [ � r , T i 1 1 � : i = 0 , . . . , 2 D − 1 ] , with r a random vector ⇓ Compute ˜ f 1 from s via Berlekamp–Massey algorithm ⇓ Check deg (˜ f 1 ) = D
First case: Shape position case Shape position [Becker, Mora, Marinari, and Traverso 1994] Ideal I ⊂ K [ x 1 , . . . , x n ] is in shape position if its Gröbner basis w.r.t. LEX ( x 1 < ∙ ∙ ∙ < x n ) is of the form [ f 1 ( x 1 ) , x 2 − f 2 ( x 1 ) , . . . , x n − f n ( x 1 )] . Recover f 1 : Wiedemann algorithm Construct s = [ � r , T i 1 1 � : i = 0 , . . . , 2 D − 1 ] , with r a random vector ⇓ Compute ˜ f 1 from s via Berlekamp–Massey algorithm ⇓ Check deg (˜ f 1 ) = D � shape position
Shape position case Suppose f i = � D − 1 k = 0 c i , k x k 1 ( for i = 2 , . . . , n ) Recover f 2 , . . . , f n : constructing linear equations NormalForm ( x i − � D − 1 k = 0 c i , k x k 1 ) = 0 ⇓ T i 1 = � D − 1 k = 0 c i , k ∙ T k 1 1 ⇓ 1 T i 1 � = � D − 1 � r , T j k = 0 c i , k ∙ � r , T k + j 1 � , j = 0 , . . . , D − 1 1 � 1 ) j r , T i 1 � = � D − 1 � ( T t k = 0 c i , k ∙ � ( T t 1 ) k + j r , 1 � , j = 0 , . . . , D − 1
Shape position case Suppose f i = � D − 1 k = 0 c i , k x k 1 ( for i = 2 , . . . , n ) Recover f 2 , . . . , f n : constructing linear equations NormalForm ( x i − � D − 1 k = 0 c i , k x k 1 ) = 0 ⇓ 1 T i 1 = � D − 1 T j k = 0 c i , k ∙ T j 1 T k 1 1 ⇓ 1 T i 1 � = � D − 1 � r , T j k = 0 c i , k ∙ � r , T k + j 1 � , j = 0 , . . . , D − 1 1 � 1 ) j r , T i 1 � = � D − 1 � ( T t k = 0 c i , k ∙ � ( T t 1 ) k + j r , 1 � , j = 0 , . . . , D − 1
Shape position case Suppose f i = � D − 1 k = 0 c i , k x k 1 ( for i = 2 , . . . , n ) Recover f 2 , . . . , f n : constructing linear equations NormalForm ( x i − � D − 1 k = 0 c i , k x k 1 ) = 0 ⇓ 1 T i 1 = � D − 1 T j k = 0 c i , k ∙ T j 1 T k 1 1 ⇓ 1 T i 1 � = � D − 1 � r , T j k = 0 c i , k ∙ � r , T k + j 1 � , j = 0 , . . . , D − 1 1 � 1 ) j r , T i 1 � = � D − 1 � ( T t k = 0 c i , k ∙ � ( T t 1 ) k + j r , 1 � , j = 0 , . . . , D − 1
Shape position case Suppose f i = � D − 1 k = 0 c i , k x k 1 ( for i = 2 , . . . , n ) Recover f 2 , . . . , f n : constructing linear equations NormalForm ( x i − � D − 1 k = 0 c i , k x k 1 ) = 0 ⇓ 1 T i 1 = � D − 1 T j k = 0 c i , k ∙ T j 1 T k 1 1 ⇓ 1 T i 1 � = � D − 1 � r , T j k = 0 c i , k ∙ � r , T k + j 1 � , j = 0 , . . . , D − 1 1 � 1 ) j r , T i 1 � = � D − 1 � ( T t k = 0 c i , k ∙ � ( T t 1 ) k + j r , 1 � , j = 0 , . . . , D − 1 � ( T t 1 ) 0 r , 1 � � ( T t 1 ) 1 r , 1 � � ( T t 1 ) D − 1 r , 1 � ∙ ∙ ∙ � r , T i 1 � � ( T t 1 ) 1 r , 1 � � ( T t 1 ) 2 r , 1 � � ( T t 1 ) D r , 1 � ∙ ∙ ∙ . . H = , b = . . . ... . . . . . . . � ( T t 1 ) D − 1 r , T i 1 � � ( T t 1 ) D − 1 r , 1 � � ( T t 1 ) D r , 1 � � ( T t 1 ) 2 D − 2 r , 1 � ∙ ∙ ∙
Shape position case Solve: H c i = b with c i = t [ c i , 0 , . . . , c i , D − 1 ] � � � � � ( T t 1 ) 0 r , 1 � ( T t 1 ) 1 r , 1 ( T t 1 ) D − 1 r , 1 ∙ ∙ ∙ � � ( T t 1 ) 1 r , 1 � ( T t 1 ) 2 r , 1 � � ( T t 1 ) D r , 1 � ∙ ∙ ∙ H = . . . ... . . . . . . � � ( T t 1 ) D − 1 r , 1 � ( T t 1 ) D r , 1 � � ( T t 1 ) 2 D − 2 r , 1 � ∙ ∙ ∙ Matrix H is a Hankel matrix:
Shape position case Solve: H c i = b with c i = t [ c i , 0 , . . . , c i , D − 1 ] � � � � � ( T t 1 ) 0 r , 1 � ( T t 1 ) 1 r , 1 ( T t 1 ) D − 1 r , 1 ∙ ∙ ∙ � � ( T t 1 ) 1 r , 1 � ( T t 1 ) 2 r , 1 � � ( T t 1 ) D r , 1 � ∙ ∙ ∙ H = . . . ... . . . . . . � � ( T t 1 ) D − 1 r , 1 � ( T t 1 ) D r , 1 � � ( T t 1 ) 2 D − 2 r , 1 � ∙ ∙ ∙ Matrix H is a Hankel matrix: Its construction is free: s = [ � r , T i 1 1 � = � ( T t 1 ) i r , 1 � : i = 0 , . . . , ( 2 D − 2 )] It is invertible: relationship between linear recurring sequences and Hankel matrices [Jonckheere and Ma 1989] Solving efficiently H x = b : complexity O ( D log 2 ( D )) [Brent, Gustavson, and Yun 1980] .
Shape position case Solve: H c i = b with c i = t [ c i , 0 , . . . , c i , D − 1 ] � � � � � ( T t 1 ) 0 r , 1 � ( T t 1 ) 1 r , 1 ( T t 1 ) D − 1 r , 1 ∙ ∙ ∙ � � ( T t 1 ) 1 r , 1 � ( T t 1 ) 2 r , 1 � � ( T t 1 ) D r , 1 � ∙ ∙ ∙ H = . . . ... . . . . . . � � ( T t 1 ) D − 1 r , 1 � ( T t 1 ) D r , 1 � � ( T t 1 ) 2 D − 2 r , 1 � ∙ ∙ ∙ Matrix H is a Hankel matrix: Its construction is free: s = [ � r , T i 1 1 � = � ( T t 1 ) i r , 1 � : i = 0 , . . . , ( 2 D − 2 )] It is invertible: relationship between linear recurring sequences and Hankel matrices [Jonckheere and Ma 1989] Solving efficiently H x = b : complexity O ( D log 2 ( D )) [Brent, Gustavson, and Yun 1980] . Construction of � ( T t 1 ) j r , T i 1 � is also free: v is also free.
Shape position case Total complexity for ideals in shape position O ( D (# T 1 + n log ( D ))) : # T 1 the number of nonzero entries in T 1 compared with O ( nD 3 ) for FGLM computing the minimal polynomial of T 1 .
Shape position case Total complexity for ideals in shape position O ( D (# T 1 + n log ( D ))) : # T 1 the number of nonzero entries in T 1 compared with O ( nD 3 ) for FGLM computing the minimal polynomial of T 1 . Random polynomial systems √ n D 2 + n − 1 n be fixed / d → + ∞ : the complexity is O ( 1 n )
General case (non shape position) Define a n -dimensional mapping E : Z n ≥ 0 − → K as → � r , T s 1 1 ∙ ∙ ∙ T s n ( s 1 , . . . , s n ) �− n 1 � .
General case (non shape position) Define a n -dimensional mapping E : Z n ≥ 0 − → K as → � r , T s 1 1 ∙ ∙ ∙ T s n ( s 1 , . . . , s n ) �− n 1 � . According to FGLM, a polynomial f = x l + � c l x s in G 2 is c s s � = l determined by � c s T s 1 1 ∙ ∙ ∙ T s n n 1 = 0 . s � Can be found using BMS:
General case (non shape position) Define a n -dimensional mapping E : Z n ≥ 0 − → K as → � r , T s 1 1 ∙ ∙ ∙ T s n ( s 1 , . . . , s n ) �− n 1 � . According to FGLM, a polynomial f = x l + � c l x s in G 2 is c s s � = l determined by � c s T s 1 1 ∙ ∙ ∙ T s n n 1 = 0 . s � Can be found using BMS: Sparse matrix = ⇒ Wiedemann algorithm = ⇒ Berlekamp–Massey = ⇒ BMS (from Coding Theory) multi-dimensional generalization of Berlekamp–Massey algorithm [Sakata 1988 & 1990; Saints and Heegard 2002]
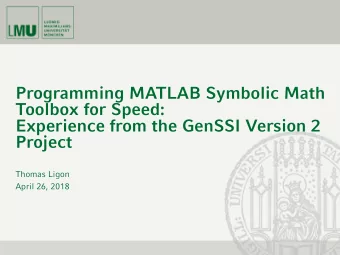
Main Algorithm General Algorithm Input : T 1 , . . . , T n Construct the linearly recurring sequence s Compute ˜ f with BM deg( ˜ f ) = D ? Yes No Recover f 2 , . . . , f n Compute F with BMS End F = G 2 ? Yes No End Compute G 2 with FGLM End Deterministic algorithm
Fast FGLM If the matrices are not sparse ...(with P. Gaudry, L. Huot and G. Renault) In the shape position case: we can apply the same algorithm. All wee need is to compute efficiently: 1 r , T ′ 2 r , ∙ ∙ ∙ , T ′ 2 D − 1 r with T ′ T ′ 1 = T t 1 1 1 1
Fast FGLM If the matrices are not sparse ...(with P. Gaudry, L. Huot and G. Renault) In the shape position case: we can apply the same algorithm. All wee need is to compute efficiently: 1 r , T ′ 2 r , ∙ ∙ ∙ , T ′ 2 D − 1 r with T ′ T ′ 1 = T t 1 1 1 1 [Keller-Gehrig]: assuming that we can multiply two n × n matrices in O ( n ω ) operations (with ω < 3 ) . First we compute: 2 k with k = 1 + [ log 2 ( D )] 2 , T ′ 4 , T ′ 8 , ...., T ′ T ′ 1 , T ′ 1 1 1 1
Fast FGLM If the matrices are not sparse ...(with P. Gaudry, L. Huot and G. Renault) In the shape position case: we can apply the same algorithm. All wee need is to compute efficiently: 1 r , T ′ 2 r , ∙ ∙ ∙ , T ′ 2 D − 1 r with T ′ T ′ 1 = T t 1 1 1 1 [Keller-Gehrig]: assuming that we can multiply two n × n matrices in O ( n ω ) operations (with ω < 3 ) . First we compute: 2 k with k = 1 + [ log 2 ( D )] 2 , T ′ 4 , T ′ 8 , ...., T ′ T ′ 1 , T ′ 1 1 1 1 Then : 3 r , T ′ 2 r ) = T ′ 2 ( T ′ ( T ′ 1 r , r ) 1 1 1 7 r , T ′ 6 r , T ′ 5 r , T ′ 4 r ) = T ′ 4 ( T ′ 3 r , T ′ 2 r , T ′ ( T ′ 1 r , r ) 1 1 1 1 1 1 1 ∙ ∙ ∙
Fast FGLM If the matrices are not sparse ...(with P. Gaudry, L. Huot and G. Renault) In the shape position case: we can apply the same algorithm. All wee need is to compute efficiently: 1 r , T ′ 2 r , ∙ ∙ ∙ , T ′ 2 D − 1 r with T ′ T ′ 1 = T t 1 1 1 1 [Keller-Gehrig]: assuming that we can multiply two n × n matrices in O ( n ω ) operations (with ω < 3 ) . First we compute: 2 k with k = 1 + [ log 2 ( D )] 2 , T ′ 4 , T ′ 8 , ...., T ′ T ′ 1 , T ′ 1 1 1 1 Then : 3 r , T ′ 2 r ) = T ′ 2 ( T ′ ( T ′ 1 r , r ) 1 1 1 7 r , T ′ 6 r , T ′ 5 r , T ′ 4 r ) = T ′ 4 ( T ′ 3 r , T ′ 2 r , T ′ ( T ′ 1 r , r ) 1 1 1 1 1 1 1 ∙ ∙ ∙ using only matrix multiplications in O ( log ( D ) D ω ) operations.
Fast FGLM with P. Gaudry, L. Huot and G. Renault Theorem Let G DRL be the DRL Gröbner basis of an ideal I in shape position. Given T 1 the multiplication matrix w.r.t. x 1 , computing the LEX Gröbner basis of I can be done in � O ( n D + D ω ) .
Fast FGLM with P. Gaudry, L. Huot and G. Renault Theorem Let G DRL be the DRL Gröbner basis of an ideal I in shape position. Given T 1 the multiplication matrix w.r.t. x 1 , computing the LEX Gröbner basis of I can be done in � O ( n D + D ω ) . ☞ Theoretical/Practical Bottleneck: building the matrix T 1
Fast FGLM with P. Gaudry, L. Huot and G. Renault Theorem Let G DRL be the DRL Gröbner basis of an ideal I in shape position. Given T 1 the multiplication matrix w.r.t. x 1 , computing the LEX Gröbner basis of I can be done in � O ( n D + D ω ) . ☞ Theoretical/Practical Bottleneck: building the matrix T 1 Generic Systems: T 1 can be obtained in 0 arithmetic operations. Non generic case: perform a random linear change of coordinates (Heuristic)
New Strategy I F 4 , F 5 G DRL Easy to build T 1 ? Randomization NO M L G F S I ′ E t s Y a F F 4 , F 5 G ′ ⇒ T ′ DRL = 1 G LEX Fast FGLM G ′ LEX
Experiments G DRL D Density Build T 1 (Build T 1 + Fast FGLM) 2 16 Random n = 16 18 . 3 % 228.6s 55410 s + 15005.3 s 2 . 0 % Cyclic 7 924 0.00s G DRL +0.04 s Cyclic 10 31990 1 . 0 % 5.67s G DRL + 525.5 s Edwards n = 4 S n + T 2 27 . 6 % 512 0.4 s 0.1 s + 0.42 s Edwards n = 4 S n + T 2 (rnd) 512 19 . 4 % 0.0 s 0.1 s + 0.02 s 2 16 Edwards n = 5 S n + T 2 > 2 days 11228 . 2 s + > 2 days 2 16 Edwards n = 5 S n + T 2 (rnd) 9 . 3 % 11.6 s 11228.2 s+7865.7 s 2 11 Bad Example, n = 11 31 . 9 % 7520.9s 0s + 7543.5s 2 11 Bad Example, n = 11 (rnd) 21 . 5 % 0.15s 5.0s + 0.2s 2 16 Bad Example, n = 16 > 2 days 0 s + > 2 days 2 16 Bad Example, n = 16 (rnd) 19 . 8 % 195.0s 38066.5 s + 14492.2 s 2 12 Eco 14 11 . 5 % 1100.1 s 926.7 s + 1102.5 s 2 12 Eco 14 (rnd) 26 . 4 % 0.1 s 926.7 s + 2.0s
Multi-core implementation Two parallel versions: Using Openmp Using pthreads ☞ have to rewrite the generation of the matrix T 1 ! Comparing original C-code (Issac 2011) and the new code: D % Magma Singular C C+SSE 4096 21.2% 1408s 2623.5s 18.1s 0.73s Katsura 12
Multi-core implementation Two parallel versions: Using Openmp Using pthreads ☞ have to rewrite the generation of the matrix T 1 ! Comparing original C-code (Issac 2011) and the new code: D % Magma Singular C C+SSE 4096 21.2% 1408s 2623.5s 18.1s 0.73s Katsura 12 6859 3.50% 1084s 8248s 15.3s 0.74s Random(n=3,d=19)
Multi-core implementation Two parallel versions: Using Openmp Using pthreads ☞ have to rewrite the generation of the matrix T 1 ! Comparing original C-code (Issac 2011) and the new code: D % Magma Singular C C+SSE 4096 21.2% 1408s 2623.5s 18.1s 0.73s Katsura 12 6859 3.50% 1084s 8248s 15.3s 0.74s Random(n=3,d=19) More important: we can solve systems with D � 2 16 solutions. ☞ Next Talk
Part II Complexity of computing Gröbner bases.
Structured systems : several applications in Crypto [F .,Perret,Safey,Spaenlehauer,Bettale] [F.,Otmani,Perret,Tillich, EC] [Gaudry, F.,Huot,Renault] [F ., Lubicz, Robert, JA] Computing DLP Error Correcting Multivariate modular Elliptic Public Key Codes correspondences Crypto curves for Abelian Edwards or F 2 Varieties HFE McEliece Curves Curves Takes advantage Multi-Homogeneous of the symmetries Systems of the system to speed up the resolution
Main results/examples Motivation to use the structure ! For (regular) quadratic systems: Overdetermined systems: n variables Semi-regular [Bardet, F.,Salvy] m = c n α equations � Sub Exponential if 1 < α < 2 − → if α = 2 Polynomial
Main results/examples Motivation to use the structure ! For (regular) quadratic systems: Overdetermined systems: n variables Semi-regular [Bardet, F.,Salvy] m = c n α equations � Sub Exponential if 1 < α < 2 − → if α = 2 Polynomial Use the fact that we are over F q : ◮ [Bettale, F .,Perret, JMC] : Hybrid Method direct Gröbner basis approach ∼ 2 1 . 8 n hybrid approach UOV q = 2 8 , n = 60 security 2 160 → 2 76 (Gröbner) → 2 59
Motivation Bilinear systems: � f i ( X , Y ) = c i , x , y x y where n = # X + # Y x ∈ X , y ∈ Y � n � ≪ 2 n � complexity is polynomial in #Solutions = # X [JSC2011,F.,Safey El Din, Spaenlehauer] Applications: ◮ MinRank/HFE: [Crypto 2008] 328233s − → [Issac 2010] 935s ◮ Challenge A 20 (Variant of McEliece): 24 hours (Magma) − → 0 . 05 sec [EC2010, F., Otmani,] Perret, Tillich]
Motivation Bilinear systems: � f i ( X , Y ) = c i , x , y x y where n = # X + # Y x ∈ X , y ∈ Y � n � ≪ 2 n � complexity is polynomial in #Solutions = # X [JSC2011,F.,Safey El Din, Spaenlehauer] Applications: ◮ MinRank/HFE: [Crypto 2008] 328233s − → [Issac 2010] 935s ◮ Challenge A 20 (Variant of McEliece): 24 hours (Magma) − → 0 . 05 sec [EC2010, F., Otmani,] Perret, Tillich] Use the symmetries: ◮ [JA, F.,Lubicz,Robert] : the action of the automorphisms of the theta group > 24 hours − → 0.1 sec ◮ [F.,Huot, Renault] symmetries related to twisted Edwards Curves this talk ! � divides by 2 n − 1 the number of solutions/complexity untractable system − → 4h25min
Complexity: introduction The goal is to bound the maximal degree of the polynomials during the computation. Theorem Gröbner basis of the ideal I generated by ( f 1 , . . . , f m ) for a graded monomial ordering up to degree D in � � n + D − 1 � ω � , as D → ∞ O m D D where ω is the exponent in the complexity of the matrix product over K . Goal: bound D � d max
Complexity of (overdetermined) systems with M. Bardet and B. Salvy F 5 Criterion: t f j is in the matrix if t / ∈ Id ( LT < ( G j − 1 )) , where G j − 1 is a Gröbner basis of { f 1 , . . . , f j − 1 } . R d , i ( n ) number of rows in the matrix generated by F 5 when computing a Gröbner basis of [ f 1 , . . . , f i ] in degree d .
Induction When d ≥ 2 : i − 1 � R d , i ( n ) = i ∙ M d − 2 ( n ) − R d − 2 , j ( n ) � �� � j = 1 � �� � number of monomials F 5 criterion degree ≤ d − 2
Induction When d ≥ 2 : i − 1 + δ K , F 2 � R d , i ( n ) = i ∙ M d − 2 ( n ) − R d − 2 , j ( n ) � �� � j = 1 � �� � number of monomials F 5 criterion degree ≤ d − 2
End of the computation #col = M d ( n ) Matrix #row = R d , m ( n ) generated by F5
End of the computation #col = M d ( n ) Matrix #row = R d , m ( n ) generated by F5
End of the computation #col = M d ( n ) Matrix #row = R d , m ( n ) generated by F5 � When h d , m ( n ) = # col − # row = 0 this end of the computation ! � we found d max
Generating series Theorem f i of degree d i semi-regular, i = 1 , . . . , m finite field F q then � � � � n H m = � ∞ � m 1 − ( 1 − δ K , F 2 ) z di 1 − δ K , F 2 z 2 d = 0 h d , m z d = 1 + δ K , F 2 z di 1 − z i = 1
Generating series Theorem f i of degree d i semi-regular, i = 1 , . . . , m finite field F q then � � � � n H m = � ∞ � m 1 − ( 1 − δ K , F 2 ) z di 1 − δ K , F 2 z 2 d = 0 h d , m z d = 1 + δ K , F 2 z di 1 − z i = 1 Theorem (Particular case) d i = 2 , F 2 , n = m semi-regular equations: � 1 + z � n ∞ � h d , n z d = 1 + z 2 d = 0
Generating series Theorem (Particular case) d i = 2 , F 2 , n = m semi-regular equations: � 1 + z � n ∞ � h d , n z d = 1 + z 2 d = 0 Example F 2 , n = m = 50 semi-regular quadratic equations � � 50 = 1 + 50 z + 1175 z 2 + 17100 z 3 + 170325 z 4 + 1202510 z 5 1 + z 1 + z 2 + 5915475 z 6 + 17831400 z 7 + 9196475 z 8 − 205886050 z 9 � z 10 � + O ☞ Hence the maximal degree occurring in the computation is 9 .
Asymptotic estimate biggest real root of � 1 + z � n � 1 dz h d , n = 1 + z 2 z d + 1 2 i π C 1 λ 0 n − λ 1 1 3 + O ( 1 d n = n 3 ) 4 1 n 3 λ 0 1 n 3 + O ( 1 d n ≈ 11 . 11360 + 1 . 0034n 3 ) 1 n � √ √ 3 ≈ 11 . 13 where λ 0 = 3 / 2 3 + 5 / 2 + 1 / 2 72 + 42 the expression of λ 1 contains the biggest real root of the Airy function (solution of ∂ 2 y ∂ z 2 − zy = 0) The formula is almost exact when n ≥ 3 !
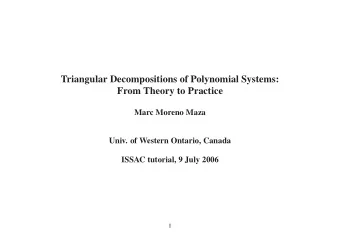
Maximal degree 16 Maximal Degree in the Gröbner basis computation random system 14 12 10 8 6 HFE 128<d<513 HFE 16<d<129 4 HFE 3<d<17 2 n 0 01 02 03 04 05 06 07 08 09 0 100
Complexity of overdetermined systems Some examples n variables, K any field m equations (semi-regular) of degree d : Under regularity assumption: Specifications d max d = 2 , m = n n+1
Complexity of overdetermined systems Some examples n variables, K any field m equations (semi-regular) of degree d : Under regularity assumption: Specifications d max d = 2 , m = n n+1 n + 1 d = 2 , m = n + 1 2
Complexity of overdetermined systems Some examples n variables, K any field m equations (semi-regular) of degree d : Under regularity assumption: Specifications d max d = 2 , m = n n+1 n + 1 d = 2 , m = n + 1 2 n d = 2 , m = 2 n 11 . 63
Complexity of overdetermined systems Some examples n variables, K any field m equations (semi-regular) of degree d : Under regularity assumption: Specifications d max d = 2 , m = n n+1 n + 1 d = 2 , m = n + 1 2 n d = 2 , m = 2 n 11 . 63 n d = 2 , m = 5 n 35 . 71 n d = 2 , m = 10 n 76 . 92
Complexity of overdetermined systems Some examples n variables, K any field m equations (semi-regular) of degree d : Under regularity assumption: Specifications d max d = 2 , m = n n+1 n + 1 d = 2 , m = n + 1 2 n d = 2 , m = 2 n 11 . 63 n d = 2 , m = 5 n 35 . 71 n d = 2 , m = 10 n 76 . 92 d = α n , m = 2 n α n if α < 0 . 29
Complexity: overdetermined systems k is a constant (does not depend on n ). d i total degree of f i . Under regularity assumption: m Degree d max m ≤ n K , d i = 2 m + 1 ( Macaulay bound) n + 1 � m ≤ n K 1 + ( d i − 1 ) ( Macaulay bound) i = 1 � m m n + k K , d i = 2 2 − h k , 1 2 + o ( 1 ) � n + k � n + k � d 2 i − 1 d i − 1 n + k K − h k , 1 + o ( 1 ) 2 6 i = 1 i = 1 � � 1 3 − 1 . 47 + 1 . 71 n − 1 n − 2 n 3 + O 2 n K , d i = 2 11 . 6569 + 1 . 04 n 3 � 1 − a 1 ( k − 1 3 + O ( 1 ) k n K , d i = 2 2 − k ( k − 1 )) n + 6 n 1 2 ( k ( k − 1 )) 3 − 1 . 58 + O ( n − 1 1 n 3 ) n F 2 , d i = 2 11 . 1360 + 1 . 0034 n � � � k n F 2 , d i = 2 − k + 1 2 + 1 � 2 k ( k − 5 ) − 1 + 2 ( k + 2 ) k ( k + 2 ) n 2
Classification Classification: m number of polynomials, n number of variables Complexity m = cste n single exponential m = cste n α sub exponential m = cste n 2 polynomial
Bilinear Equations in Algebraic Attacks: Motivation Powerful attack somewhat similar to Lattice attacks: we consider k vectors v i = [ . . . , v i , j , . . . ] with v i , j ∈ Z Try to find: ( λ 1 , . . . , λ k ) ∈ Z k such that k � λ i v i is small i = 1
Bilinear Equations in Algebraic Attacks: Motivation Powerful attack somewhat similar to Lattice attacks: we consider k vectors v i = [ . . . , v i , j , . . . ] with v i , j ∈ Z Try to find: ( λ 1 , . . . , λ k ) ∈ Z k such that k � λ i v i is small i = 1 using LLL : find a ≈ small vector in Polynomial Time
Bilinear Equations in Algebraic Attacks: Motivation For k quadratic multivariate polynomials f i ∈ K [ x 1 , . . . , x n ] : � ∂ 2 f l � f l �→ H ( f l ) = M l = matrix representation of f i ∂ x i ∂ x j 1 � i , j � n Try to find: ( λ 1 , . . . , λ k ) ∈ K k such that: k � λ i M i is “small” i = 1
Bilinear Equations in Algebraic Attacks: Motivation For k quadratic multivariate polynomials f i ∈ K [ x 1 , . . . , x n ] : � ∂ 2 f l � f l �→ H ( f l ) = M l = matrix representation of f i ∂ x i ∂ x j 1 � i , j � n Try to find: ( λ 1 , . . . , λ k ) ∈ K k such that: k � λ i M i is of small rank i = 1
Bilinear Equations in Algebraic Attacks: Motivation For k quadratic multivariate polynomials f i ∈ K [ x 1 , . . . , x n ] : � ∂ 2 f l � f l �→ H ( f l ) = M l = matrix representation of f i ∂ x i ∂ x j 1 � i , j � n Try to find: ( λ 1 , . . . , λ k ) ∈ K k such that: k � λ i M i is of rank r Minrank Problem i = 1
Bilinear Equations in Algebraic Attacks: Motivation For k quadratic multivariate polynomials f i ∈ K [ x 1 , . . . , x n ] : � ∂ 2 f l � f l �→ H ( f l ) = M l = matrix representation of f i ∂ x i ∂ x j 1 � i , j � n Try to find: ( λ 1 , . . . , λ k ) ∈ K k such that: k � λ i M i is of rank r Minrank Problem i = 1 That is to say: in some basis � k i = 1 λ i f i depends only on r variables.
Two algebraic modelings: structured equations M = M 0 − � k i = 1 λ i M i . The Kipnis-Shamir modeling The minors modeling Rank ( M ) ≤ r ⇔ ∃ x ( 1 ) , . . . , x ( m − r ) ∈ Ker ( M ) . Rank ( M ) ≤ r � I m − r all minors of size ( r + 1 ) of M vanish. M ∙ x ( 1 ) x ( m − r ) = 0 . 1 1 . . . . . . � m � 2 equations of degree r + 1. . . . . . . r + 1 x ( 1 ) x ( m − r ) k variables. r r . . . Few variables, lots of equations, high m ( m − r ) bilinear equations. degree !! k + r ( m − r ) variables. Applications of bilinear equations in Crypto: Cryptanalysis of HFE and MinRank [CRYPTO’08, ISSAC’10, PKC’11]. Cryptanalysis of McEliece [EUROCRYPT’10].
Bilinear systems joint work with M. Safey El Din and PJ Spaenlehauer F = ( f 1 , . . . , f m ) : system of homogeneous bilinear equations . � f i ( X , Y ) = c i , x , y x y where n = # X + # Y x ∈ X , y ∈ Y ∂ f 1 ∂ f 1 ∂ f 1 ∂ f 1 . . . . . . ∂ y 0 ∂ y ny ∂ x 0 ∂ x nx . . . . . . . . . . . . jac X ( F i ) = jac Y ( F i ) = . . . . . . ∂ f i ∂ f i ∂ f i ∂ f i . . . . . . ∂ x 0 ∂ x nx ∂ y 0 ∂ y ny Euler relations � � ∂ f ∂ f f = x j = y j . ∂ x j ∂ y j f 1 x 0 y 0 . . . . . . = jac X ( F i ) ∙ = jac Y ( F i ) ∙ . . . f i x n x y n y
Trivial Syzygies of Bilinear Systems An example with small parameters: n x = n y = 2 , m = 4 We rewrite the usual trivial syzygie as: � � � � f 1 f 2 � � 0 = f 2 f 1 − f 1 f 2 = � � f 1 f 2
Recommend






More recommend
Explore More Topics
Stay informed with curated content and fresh updates.