Geometry of LMIs and determinantal representations of algebraic - PowerPoint PPT Presentation
Geometry of LMIs and determinantal representations of algebraic plane curves Didier HENRION LAAS-CNRS Toulouse, FR Czech Tech Univ Prague, CZ April 2007 Outline 1. LMIs and SDP 2. Geometry of LMI sets 3. Cubic curves 4. Contact curves 5.
Geometry of LMIs and determinantal representations of algebraic plane curves Didier HENRION LAAS-CNRS Toulouse, FR Czech Tech Univ Prague, CZ April 2007
Outline 1. LMIs and SDP 2. Geometry of LMI sets 3. Cubic curves 4. Contact curves 5. Resultants
LMI Linear matrix inequality n � F ( x ) = F 0 + x i F i � 0 i =1 where F i are given symmetric real matrices and constraint � 0 means positive semidefinite (all eigenvalues real nonnegative) Arise in control theory (Lyapunov 1890, Willems 1971, Boyd et al. 1994), combinatorial optimization, finance, structural me- chanics, and many other areas Key property = convex in x
SDP Decision problem min x � i c i x i s . t . F 0 + � i x i F i � 0 Optimization over LMIs = semidefinite programming, versatile generalization of linear (and convex quadratic) programming to the convex cone of positive semidefinite matrices At given accuracy can be solved in polynomial time using interior- point methods (Nesterov, Nemirovski 1994) Many public-domain solvers available
Outline 1. LMIs and SDP 2. Geometry of LMI sets 3. Cubics 4. Contact curves 5. Resultants
Geometry of LMI sets How does an LMI set n F = { x ∈ R n : F ( x ) = F 0 + � x i F i � 0 } i =1 look like in Euclidean space ? Matrix F ( x ) is PSD iff its diagonal minors f i ( x ) are nonnegative So the LMI set can be described as F = { x ∈ R n : f i ( x ) ≥ 0 , i = 1 , 2 , . . . } a convex closed basic semialgebraic set
Semialgebraic formulation For an d -by- d matrix F ( x ) we have 2 d − 1 diagonal minors A simpler criterion follows from the fact that a poly t �→ f ( t ) = k f d − k t k = � k ( t − t k ) which has only real roots satisfies t k ≤ 0 � iff f k ≥ 0 Apply to characteristic poly f ( t, x ) = det( tI d + F ( x )) = � d k =0 f d − k ( x ) t k which is monic, i.e. f 0 ( x ) = 1 Only d poly ineqs f k ( x ) ≥ 0 to be checked Polys f k ( x ) are sums of principal minors of F ( x ) of order k or equivalently sums of k -term-products of eigenvalues of F ( x )
Example of 2D LMI feasible set 1 − x 1 x 1 + x 2 x 1 F ( x ) = x 1 + x 2 2 − x 2 0 � 0 0 1 + x 2 x 1 System of 3 polynomial inequalities f i ( x ) ≥ 0 The first one is f 1 ( x ) = trace F ( x ) = 4 − x 1 ≥ 0
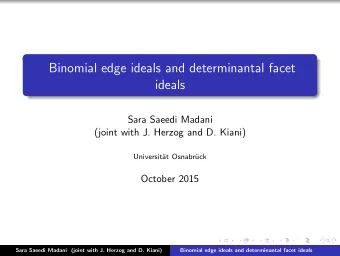
f 2 ( x ) = 5 − 3 x 1 + x 2 − 2 x 2 1 − 2 x 1 x 2 − 2 x 2 2 ≥ 0 4 3 2 1 x 2 0 −1 −2 −3 −4 −4 −3 −2 −1 0 1 2 3 4 x 1
f 3 ( x ) = det F ( x ) = 2 − 2 x 1 + x 2 − 3 x 2 1 − 3 x 1 x 2 − 2 x 2 2 − x 1 x 2 2 − x 3 2 ≥ 0 4 3 2 1 x 2 0 −1 −2 −3 −4 −4 −3 −2 −1 0 1 2 3 4 x 1
LMI set = intersection of level-sets f k ( x ) ≥ 0, k = 1 , 2 , 3 4 3 2 1 x 2 0 −1 −2 −3 −4 −4 −3 −2 −1 0 1 2 3 4 x 1 Boundary of LMI region shaped by determinant Other polys only isolate convex connected component
LMI set or not ? 10 9 8 7 6 x 2 5 4 3 2 1 0 0 0.5 1 1.5 2 x 1 x 1 x 2 ≥ 1 and x 1 ≥ 0
LMI x 1 x 2 ≥ 1 and x 1 ≥ 0 ⇐ ⇒ � � 1 x 1 � 0 1 x 2
LMI set or not ? 0.9 0.8 0.7 0.6 0.5 x 2 0.4 0.3 0.2 0.1 0 −0.1 −1 −0.5 0 0.5 1 x 1 x 2 ≥ x 2 1
LMI x 2 ≥ x 2 1 ⇐ ⇒ � � 1 x 1 � 0 x 1 x 2
LMI set or not ? 1 0.8 0.6 0.4 0.2 x 2 0 −0.2 −0.4 −0.6 −0.8 −1 −1 −0.5 0 0.5 1 x 1 x 2 1 + x 2 2 ≤ 1
LMI x 2 1 + x 2 2 ≤ 1 ⇐ ⇒ � � 1 + x 1 x 2 � 0 1 − x 1 x 2
LMI set or not ? 0.9 0.8 0.7 0.6 0.5 x 2 0.4 0.3 0.2 0.1 0 −0.1 −1 −0.5 0 0.5 1 x 1 { x ∈ R 2 : t 2 + 2 x 1 t + x 2 ≥ 0 , ∀ t ∈ R }
NOT LMI: not basic semialgebraic 0.9 0.8 0.7 0.6 0.5 x 2 0.4 0.3 0.2 0.1 0 −0.1 −1 −0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6 0.8 1 x 1 x 2 ≥ x 2 1 or x 1 , x 2 ≥ 0
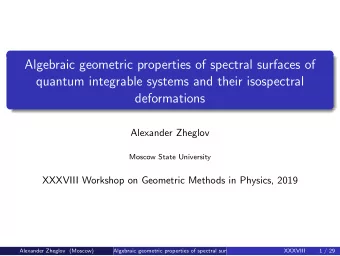
LMI set or not ? 2 1.5 1 0.5 x 2 0 −0.5 −1 −1.5 −2 −1.5 −1 −0.5 0 0.5 1 1.5 2 x 1 1 − 2 x 1 − x 2 1 − x 2 2 + 2 x 3 1 ≥ 0
NOT LMI: not connected 2 1.5 1 0.5 x 2 0 −0.5 −1 −1.5 −2 −1.5 −1 −0.5 0 0.5 1 1.5 2 x 1 1 − 2 x 1 − x 2 1 − x 2 2 + 2 x 3 1 ≥ 0
LMI set or not ? 2 1.5 1 0.5 x 2 0 −0.5 −1 −1.5 −2 −1.5 −1 −0.5 0 0.5 1 1.5 2 x 1 1 ≥ 0 and x 1 ≤ 1 1 − 2 x 1 − x 2 1 − x 2 2 + 2 x 3 2
LMI 1 ≥ 0 and x 1 ≤ 1 1 − 2 x 1 − x 2 1 − x 2 2 + 2 x 3 2 ⇐ ⇒ 1 0 x 1 1 � 0 x 1 x 2 0 x 2 1 − 2 x 1
LMI set or not ? 1.5 1 0.5 x 2 0 −0.5 −1 −1.5 −1.5 −1 −0.5 0 0.5 1 1.5 x 1 x 4 1 + x 4 2 ≤ 1
NOT LMI but projection of an LMI 1 + u 1 u 2 1 − u 1 u 2 1 x 1 � 0 x 1 u 1 1 x 2 x 2 u 2 with two liftings u 1 and u 2
Key questions Which convex closed basic semialgebraic sets are LMI sets ? Which convex closed semialgebraic sets are projections of LMI sets ? In this talk we only address the first question: projections are not allowed
Determinantal representation Consider the non-empty semialgebraic set F = { x ∈ R n : f ( x ) ≥ 0 } where f ( x ) is a given polynomial of degree d Without loss of generality, assume that we are given a point e (typically the origin) satisfying f ( e ) = 1 Since the boundary of an LMI set is shaped by a determinant, can we find symmetric real matrices F i such that n � F ( x ) = F 0 + x i F i , det F ( x ) = f ( x ) i =1 So we would like to find a linear symmetric determinantal representation (a symmetric pencil) for polynomial f ( x )
Definite determinantal representation = LMI Once we have det F ( x ) = f ( x ), we would like to know whether closure { x ∈ R n : det F ( x ) > 0 } ∋ e F = { x ∈ R n : F ( x ) ≥ 0 } = Since f ( e ) = 1, it holds e ∈ int F and F ( e ) ≻ 0 so the represen- tation must be definite for F to be expressed as an LMI Under which conditions on f can we find such a definite representation ? Define the algebraic curve C = { x ∈ R n : f ( x ) = 0 } containing the boundary of F
Rigid convexity Necessary condition for F to have a definite symmetric linear determinantal, or LMI representation: Any line passing through an interior point of F must intersect C exactly d times (counting multiplicities and points at infinity) Rigid convexity implies convexity Strong result by Helton and Vinnikov (2002): the condition is also sufficient in the plane, i.e. for n = 2 Also sufficient for n > 2 ?
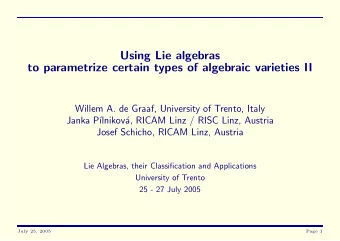
Cartesian ovals 2 1.5 1 0.5 x 2 0 −0.5 −1 −1.5 −2 −1.5 −1 −0.5 0 0.5 1 1.5 2 2.5 3 x 1 (3(( x 1 +1) 2 + x 2 2 +1) − 10( x 1 +1)) 2 − 10(( x 1 +1) 2 + x 2 2 +1)+12( x 1 +1)+1 ≥ 0
Cartesian ovals 2 1.5 1 0.5 x 2 0 −0.5 −1 −1.5 −2 −1.5 −1 −0.5 0 0.5 1 1.5 2 2.5 3 x 1 Inner oval is rigidly convex hence LMI representable
Constructive methods Checking rigid convexity amounts to checking positive semidefi- niteness of the Hermite matrix of polynomial p ( x ) for all x Given f ( x ) and e , once we know that the set F = { x ∈ R n : f ( x ) ≥ 0 } ∋ e is rigidly convex, how can we systematically build symmetric ma- trices F i such that n F = { x ∈ R n : F ( x ) = F 0 + � x i F i � 0 } i =1 and so f ( x ) = det F ( x ) ? When/how can we enforce F 0 = I ? In the sequel we focus exclusively on the plane case ( n = 2)
Vinnikov’s construction (1993) In principle, matrices F i can be built from polynomial f ( x ) using complex Riemann surface theory Pencil F ( x ) can be obtained via the construction of a basis for a complete linear system of the algebraic curve f ( x ) = 0 Determinantal representations are characterized by line bundles parametrized in the Jacobian variety of the curve Coefficients of F i can be obtained via the period matrix of the curve and transcendental theta functions evaluated by numerical integration No numerical implementation attempted so far..
Outline 1. LMIs and SDP 2. Geometry of LMI sets 3. Cubics 4. Contact curves 5. Resultants
Cubics When deg f ( x ) = 3 the genus of f ( x ) can be 0 (rational, or singular cubic) or 1 (elliptic, or smooth cubic) 0 f ( x 1 x 0 , x 2 Homogeneize f ( x 0 , x 1 , x 2 ) = x 3 x 0 ), define Hessian matrix ∂ 2 f ( x ) � � H ( f ( x )) = ∂x i ∂x j i,j =0 , 1 , 2 which is real symmetric linear, and Hessian h ( x ) = det H ( f ( x )) which is cubic An elliptic curve has 9 flexes x ∗ (3 of which are real) satisfying f ( x ∗ ) = h ( x ∗ ) = 0
Parametrized Hessian f ( x ) and h ( x ) share the same flexes and we know a symmetric linear determinantal representation for h ( x ), so use linear homo- topy to find one for f ( x ) (thanks to Fr´ ed´ eric Han) For real t define parametrized Hessian g ( x, t ) = det H ( h ( x ) + tf ( x )) and find t ∗ satisfying g ( x ∗ , t ∗ ) = f ( x ∗ ) at a real flex x ∗ by solving a cubic equation Three distinct pencils not equivalent by congruence transforma- tion, one of which is definite hence LMI
Recommend







More recommend
Explore More Topics
Stay informed with curated content and fresh updates.