Geometry driven collapses for simplifying Cech complexes Dominique - PowerPoint PPT Presentation
Geometry driven collapses for simplifying Cech complexes Dominique Attali ( * ) and Andr Lieutier ( ** ) ( * ) Gipsa-lab ( ** ) Dassault Systm es Shape in dD Guaranties on the result? R d in R d n points Simplicial complex Betti
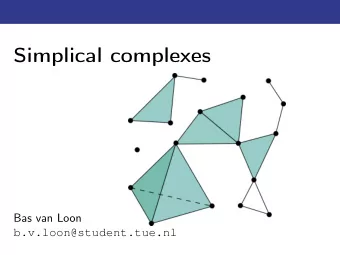
Geometry driven collapses for ˇ simplifying Cech complexes Dominique Attali ( * ) and André Lieutier ( ** ) ( * ) Gipsa-lab ( ** ) Dassault Systèm es
Shape in dD Guaranties on the result? R d in R d n points Simplicial complex Betti numbers Reconstruction Processing Volume Medial axis Signatures . . . Delaunay complex Building / / / / / / / / / / / / / How to reconstruct without Delaunay? 2
How to reconstruct without building the whole Delaunay complex? weak Delaunay triangulation [V. de Silva 2008] w Landmarks tangent plane tangential Delaunay complexes [J. D. Boissonnat & A. Ghosh 2010] Rips complexes our approach with André Lieutier and David Salinas 3
Rips complexes α b a c Rips( P, α ) = { σ ⊂ P | Diameter( σ ) ≤ 2 α } ✹ proximity graph connects every pair of points within G α 2 α ✹ [Flag G = largest complex whose 1-skeleton is G ] Rips( P, α ) = Flag G α ✹ compressed form of storage through the 1-skeleton ✹ easy to compute 4
SHAPE RECONSTRUCTION Shape A P ⊂ R d Rips( P, α ) Reconstruction Compressed form of storage through the 1-skeleton which is easy to compute 5
SHAPE RECONSTRUCTION Shape A Sampling conditions [AL10][ALS12b] ' P ⊂ R d Rips( P, α ) Reconstruction Compressed form of storage through the 1-skeleton which is easy to compute 5
SHAPE RECONSTRUCTION Shape A Sampling conditions [AL10][ALS12b] ' P ⊂ R d Rips( P, α ) Triangulation of A Reconstruction Simplification ➊ Compressed form of storage Reduce the size through the 1-skeleton which is easy to compute ➋ Retrieve topology Can be high-dimensional! 5
Example Physical system Point cloud in R 128 2 Polygonal curve Rips complex Correct intrinsic dimension Correct homotopy type Is high-dimensional! 6
Simplification by iteratively applying elementary operations c Contraction b Edge contraction ab �→ c a Identifies vertices a and b to vertex c Preserves homotopy type if Lk K ( ab ) = Lk K ( a ) ∩ Lk K ( b ) ∩ = Lk K ( σ ) = { τ | τ ∩ σ = ∅ , τ ∪ σ ∈ K } x x Collapse ab Collapse of a simplex σ min b a Removes σ min and its cofaces ∆ y y Preserves homotopy type if ∆ has a unique maximal element σ max 6 = σ min σ max 6 = σ min ∆ 7 σ min
Simplifying Rips complexes A ⊂ R d is a compact set P ⊂ R d is a finite point set α > 0 sequence of collapses Rips( P, α ) Conditions 8
A key tool \ Nerve C = { σ � P | σ ⇥ = ⇤ and C p ⇥ = ⇤ } p ∈ σ If T z ∈ σ C z is either empty or contractible Nerve Lemma. ≃ S C , where C = { C p | p ∈ P } finite collection of closed sets 9
ˇ Cech complexes Cech( P, α ) = Nerve { B ( p, α ) | p ∈ P } Nerve Lemma. ≃ P ⊕ α = [ B ( p, α ) α -o ff set of P p ∈ P α p 10
ˇ Cech complexes Rips( P, α ) Cech( P, α ) = Nerve { B ( p, α ) | p ∈ P } ⊃ ≃ Nerve Lemma. P ⊕ α = [ B ( p, α ) α -o ff set of P p ∈ P α p 11
Overview of what we knew! Rips( P, α ) Cech( P, α ) ⊃ Nerve Lemma ≃ P ⊕ α 12
Overview of what we knew! Rips( P, α ) Cech( P, α ) ⊃ Nerve Lemma ≃ deform. retracts Shape A P ⊕ α √ d H ( A, P ) ≤ ε < (3 − 8) Reach A (SC1) √ α = (2 + 2) ε [Niyogi Smale Weinberger 2004] A Reach A = d ( A, MedialAxis( A )) MedialAxis( A ) = { m ∈ R d | m has at least two closest points in A } 13
Overview of what we knew! collapses Rips( P, α ) Cech( P, α ) √ √ p d H ( A, P ) ≤ ε < 2 2 − 2 − 2 (SC2) Reach( A ) √ 2 + 2 Nerve Lemma ≃ α ≈ 7 . 22 ε [ALS12b] deform. retracts Shape A P ⊕ α √ d H ( A, P ) ≤ ε < (3 − 8) Reach A (SC1) √ α = (2 + 2) ε [Niyogi Smale Weinberger 2004] A Reach A = d ( A, MedialAxis( A )) MedialAxis( A ) = { m ∈ R d | m has at least two closest points in A } 14
Overview of what we knew! collapses Rips( P, α ) Cech( P, α ) (SC2) [ALS12b] ≃ Nerve Lemma deform. retracts Shape A P ⊕ α (SC1) [NSW04] 15
Overview of what is new Nerve { B ( p, α ) | p ∈ P } Nerve { A ∩ B ( p, α ) | p ∈ P } collapses Rips( P, α ) Cech( P, α ) Cech A ( P, α ) (SC2) [ALS12b] ≃ Nerve Lemma deform. retracts Shape A P ⊕ α (SC1) [NSW04] 16
Overview of what is new Nerve { B ( p, α ) | p ∈ P } Nerve { A ∩ B ( p, α ) | p ∈ P } collapses collapses Rips( P, α ) Cech( P, α ) Cech A ( P, α ) (SC2) (SC1) [ALS12b] ≃ Nerve Lemma deform. retracts Shape A P ⊕ α (SC1) [NSW04] 16
Overview of what is new Nerve { B ( p, α ) | p ∈ P } Nerve { A ∩ B ( p, α ) | p ∈ P } collapses collapses Rips( P, α ) Cech( P, α ) Cech A ( P, α ) (SC2) (SC1) [ALS12b] ≃ Nerve Lemma Nerve Lemma ≃ A ⊂ P ⊕ α α < Reach A deform. retracts Shape A P ⊕ α (SC1) [NSW04] 17
Overview of what is new Nerve { B ( p, α ) | p ∈ P } Nerve { A ∩ B ( p, α ) | p ∈ P } Nerve { A ∩ Hull α ( C v ) | v ∈ V } collapses collapses collapses Nerve of an Rips( P, α ) Cech( P, α ) Cech A ( P, α ) α -robust (SC2) covering of A (SC1) α < Reach A [ALS12b] Nerve Lemma Nerve Lemma ≃ ≃ A ⊂ P ⊕ α α < Reach A deform. retracts Shape A P ⊕ α (SC1) [NSW04] 18
Overview of what is new Nerve { B ( p, α ) | p ∈ P } Nerve { A ∩ B ( p, α ) | p ∈ P } Nerve { A ∩ Hull α ( C v ) | v ∈ V } collapses collapses collapses Nerve of an Rips( P, α ) Cech( P, α ) Cech A ( P, α ) α -robust (SC2) covering of A (SC1) α < Reach A [ALS12b] Nerve Lemma Nerve Lemma ≃ ≃ A ⊂ P ⊕ α α < Reach A deform. retracts Shapes for which Shape A P ⊕ α (SC1) ∃ such triangulations ? [NSW04] 19
ˇ Restricting the Cech complex √ √ Theorem 2 If d H ( A, P ) ≤ ε < (3 − 8) Reach( A ) and α = (2 + 2) ε , then there exists a sequence of collapses from Cech( P, α ) to Cech A ( P, α ) . Define collapses? Cech( P, α ) Cech A ( P, α ) Nerve { B ( p, α ) | p ∈ P } Nerve { A ∩ B ( p, α ) | p ∈ P } = = K ( t ) = Nerve { A t ∩ B ( p, α ) | p ∈ P } K (+ ∞ ) K (0) p 1 p 2 K ( t ) A q q 20
ˇ Restricting the Cech complex √ √ Theorem 2 If d H ( A, P ) ≤ ε < (3 − 8) Reach( A ) and α = (2 + 2) ε , then there exists a sequence of collapses from Cech( P, α ) to Cech A ( P, α ) . Define collapses? Cech( P, α ) Cech A ( P, α ) Nerve { B ( p, α ) | p ∈ P } Nerve { A ∩ B ( p, α ) | p ∈ P } = = K ( t ) = Nerve { A t ∩ B ( p, α ) | p ∈ P } K (+ ∞ ) K (0) p 1 A t p 2 K ( t ) A q q 21
ˇ Restricting the Cech complex √ √ Theorem 2 If d H ( A, P ) ≤ ε < (3 − 8) Reach( A ) and α = (2 + 2) ε , then there exists a sequence of collapses from Cech( P, α ) to Cech A ( P, α ) . Define collapses? Cech( P, α ) Cech A ( P, α ) Nerve { B ( p, α ) | p ∈ P } Nerve { A ∩ B ( p, α ) | p ∈ P } = = K ( t ) = Nerve { A t ∩ B ( p, α ) | p ∈ P } K (+ ∞ ) K (0) p 1 p 2 K ( t ) A t A q q 22
ˇ Restricting the Cech complex √ √ Theorem 2 If d H ( A, P ) ≤ ε < (3 − 8) Reach( A ) and α = (2 + 2) ε , then there exists a sequence of collapses from Cech( P, α ) to Cech A ( P, α ) . Define collapses? Cech( P, α ) Cech A ( P, α ) Nerve { B ( p, α ) | p ∈ P } Nerve { A ∩ B ( p, α ) | p ∈ P } = = K ( t ) = Nerve { A t ∩ B ( p, α ) | p ∈ P } K (+ ∞ ) K (0) p 1 p 2 K ( t ) A t A q q 23
ˇ Restricting the Cech complex √ √ Theorem 2 If d H ( A, P ) ≤ ε < (3 − 8) Reach( A ) and α = (2 + 2) ε , then there exists a sequence of collapses from Cech( P, α ) to Cech A ( P, α ) . Define collapses? Cech( P, α ) Cech A ( P, α ) Nerve { B ( p, α ) | p ∈ P } Nerve { A ∩ B ( p, α ) | p ∈ P } = = K ( t ) = Nerve { A t ∩ B ( p, α ) | p ∈ P } K (+ ∞ ) K (0) p 1 p 2 K ( t ) A q q 24
ˇ Collapsing restricted Cech complex Theorem 3 Let C = { C v | v ∈ V } an α -robust covering of A with V ⊂ P . Suppose there exists f : V → P injective such that C v ⊂ B � ( f ( v ) , α )) . If α < Reach( A ) , then there is a sequence of collapses from Cech A ( P, α ) to Nrv C . Define collapses? Cech A ( P, α ) Nerve { A ∩ B ( p, α ) | p ∈ P } = = K ( t ) = Nerve { D p ( t ) | p ∈ P } K (0) 25
Evolving family of compact sets Then, generically K ( t ) undergoes collapses as t increases. q b a K ( t ) D a ( t ) D b ( t ) D q ( t ) 26
Evolving family of compact sets Then, generically K ( t ) undergoes collapses as t increases. q b a K ( t ) D a ( t ) D b ( t ) D q ( t ) 27
Evolving family of compact sets Then, generically K ( t ) undergoes collapses as t increases. q b a K ( t ) D a ( t ) D b ( t ) D q ( t ) 28
Evolving family of compact sets Then, generically K ( t ) undergoes collapses as t increases. D q ( t ) q b a K ( t ) D a ( t ) D b ( t ) 29
Evolving family of compact sets Then, generically K ( t ) undergoes collapses as t increases. D q ( t ) q b a K ( t ) D a ( t ) D b ( t ) 30
Evolving family of compact sets Then, generically K ( t ) undergoes collapses as t increases. D q ( t ) q b a K ( t ) D a ( t ) D b ( t ) 31
Recommend








More recommend
Explore More Topics
Stay informed with curated content and fresh updates.