G ROUP 6
• • • • •
• • • • • • • •
Robot Start Area Course Target Course Target (For Zone B) (For Zone B) Obstacle Zone A Course Keepout Area 10 Feet 4 Feet Obstacle Obstacle Obstacle Zone B 15 Feet Obstacle Course Target Course Target (For Zone A) (For Zone A) Robot Start Area
• • • •
• • • • • • • •
DriveTrain
M27-150 motor • High efficiency • Each one is rated to run between 6-24V • Our simulations proved that the most efficient way to handle the load is at 12V drawing 3.5 amps each • Most cost effective when drivetrain is included • Gear ratio: 11 tooth sprocket geared up to a 42 tooth sprocket • Speed output after gearing = 5.28 mph • Torque output after gearing = 0.56 foot pounds
• After doing power analysis, we chose to go with a lead acid battery. • Advantages: • Low price • High capacity • Disadvantages: • Larger in size • High weight
All of the power in the robot will be managed by one power • management PCB • The power management PCB will take power from the battery and regulate the voltage for each component accordingly • Only step-down linear regulators will be used Cheaper to implement • Lower complexity • Less noise filtering needed • • Noise reduction / filtering circuitry will be implemented
• •
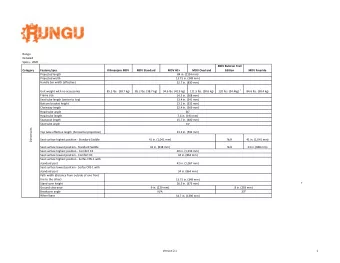
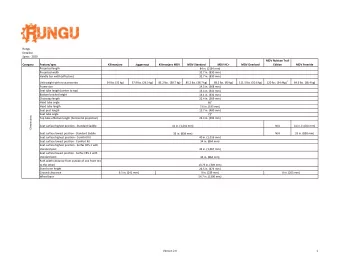
• Nerf Rival Khaos (Balls) • Nerf HyperFire Elite (Darts) • Rounds: 25 Darts • • Dimensions: 4.2 x 14.8 x 28.5 • Dimensions: 4 x 24 x 12 inches inches • Electrically powered • Electrically powered • Range up to 90 ft • Range up to 90 ft
ELP 2.0MP Varifocal Lens Camera • The ELP camera was chosen as the main tracking sensor due to its bigger sensor and compatibility. • The ELP cameras have a 1/2.7” sensor as compared to others which have a smaller 1/4” sensor. • Max performance 1080p running at 30fps • This camera also has the feature to change its focal length.
LeddarOne Distance Sensor • The LeddarOne was chosen as the second sensor subsystem due to its range and price. • it is an infrared sensor that measures intensity of the reflected beam. • It will back up the camera by giving the range and confirming targets. • It has a max range of 130 feet and no minimum distance.
SBC – Single board computer Nvidia Jetson TK1: • Responsible for handling all computer vision algorithms, sensor feedback, and wireless communication to the display. • SoC includes CPU + GPU. • Offers desktop-level GPU performance with embedded-level power consumption. • Relevant specs: • Nvidia Kepler GPU with 192 CUDA Cores • Nvidia 4-Plus-1 Quad-Core ARM Cortex-A15 CPU clocked at 2.32 GHz • 2GB of DDR3L RAM
SBC – Comparison CPU GPU RAM Name/Model SoC Architecture Cores Frequency Architecture Frequency Cores Size Type 192 Nvidia Jetson ARM Cortex- Nvidia Kepler Tegra K1 64-bit 4 2.32 GHz 950 MHz Cuda 2 GB DDR3L TK1 A15 GK20a Cores Raspberry Pi 3 ARM Cortex- not BCM2837 64-bit 4 1.2 GHz VideoCore IV 400 MHz 1 GB LPDDR2 Model B A53 specified
MCU – Microcontroller Unit ATmega328p • Will handle pan & tilt servos and fire controls. • Open-source hardware; can be easily modified for specific uses. • Huge online support (for extra expandability, shields, and parts) • Easy-to-use and intuitive (runs on C++ based environment). • Low power consumption and price. • Relevant specifications: ▪ 8-bit architecture ▪ 32KB of Flash memory ▪ 2KB of RAM
MCU PCB Schematic
Drivetrain MCU • • • •
• • • • •
• • • • • •
• Detection Type Duration FPS Face Detection (Haar 96.3 ms 10.3 FPS Cascades) Medic Detection (Haar 264 ms 3.8 FPS Cascades) Robot Detection 91 ms 10.9 FPS (Background Subtraction)
P ROTOTYPE R OBOT C OST : Electronics Prototype Item Cost/Unit E LECTRICAL C OST (I NITIAL ESTIMATE : Unit Qty. $600~) Nvidia Jetson TK1 (student discount) 1 $130.00 LeddarOne Rangefinder Sensor 1 $115.00 $545 ELP Varifocal Camera 1 $54.00 M ECHANICAL COST : Arduino Mega Clone 1 $11.99 $440 Pololu Dual VNH5019 Motor Driver 1 $49.23 T OTAL A S -D EMONSTRATED COST : Arduino USB-Serial (FTDI chip) 1 $15.00 $985 PCB components & Misc. parts {wire, switches etc} 1 $30.00 PCB Manufacturing 2 $33.00 R ESEARCH F UNDS : Bluetooth HC-06 module 1 $8.99 $935 USB 7-port hub 1 $39.99 T OTAL C OST : Lead Acid Battery (12Ah) 1 $25.00 $1920 Prototype Electronics Cost $545.20
Category Primary Secondary System-level design Tarek Josh Image Processing/CV Hardware Design Tarek Josh Turret system MCU + Fire control Tarek Seif Power analysis & design Seif Tarek Power management PCB Seif Tarek Sensors and feedback control Josh Tarek Drivetrain control (MCU + Motor Driver) Tarek Josh Drive motors Yarub Tarek Gun selection Yarub Seif Turret assembly (mounting hardware) Josh Yarub Wireless Communication Tarek Josh Presentation Master Josh Hidden 5th member Toan Nguyen
• • • • • • • • • • • • • •
• • •
Recommend
More recommend
Unleash a World of Digital Possibilities—Browse, Share, and Explore Content Without Boundaries