
Finite element exterior calculus Douglas N. Arnold School of - PowerPoint PPT Presentation
Finite element exterior calculus Douglas N. Arnold School of Mathematics, University of Minnesota NSF/CBMS Conference, ICERM, June 1115, 2012 collaborators: R. Falk, R. Winther, G. Awanou, F. Bonizzoni, D. Boffi, J. Gopalakrishnan, H. Chen
Hilbert complexes Definition A Hilbert complex is a sequence of Hilbert spaces W k and a sequence of closed d.d.linear operators d k from W k to W k + 1 such that R ( d k ) ⊂ N ( d k + 1 ) . V k = D ( d k ) H-space with graph norm: � v � 2 V k = � v � 2 W k + � d k v � 2 W k + 1 The domain complex → V n → 0 d d d 0 → V 0 → V 1 − → · · · − − is a bounded Hilbert complex (with less information). It is a cochain complex, so it has (co)cycles, boundaries, and homology. An H-complex is closed if B k is closed in W k (or V k ). An H-complex is Fredholm if dim H k < ∞ . Fredholm = ⇒ closed 24 / 94
The dual complex k ⊂ W k → W k − 1 as the adjoint of d k − 1 : V k ⊂ W k − 1 → W k . Define d ∗ k : V ∗ It is closed d.d.and, since R ( d k − 1 ) ⊂ N ( d k ) , k + 1 ) = N ( d k ) ⊥ ⊂ R ( d k − 1 ) ⊥ = N ( d k R ( d ∗ k + 1 ) ⊂ R ( d ∗ ∗ ) , so we get a Hilbert chain complex with domain complex d ∗ d ∗ d ∗ → V n − 1 → V ∗ 0 → V n n − 1 − n − − → · · · − 1 0 → 0 . If ( W , d ) is closed, then ( W , d ∗ ) is as well, by the Closed Range Theorem. From now on we mainly deal with closed H-complexes. . . 25 / 94
Harmonic forms The Hilbert structure of a closed H-complex allows us to identify the homology space H k = Z k / B k with a subspace H k of W k : H k := Z k ∩ B k ⊥ = Z k ∩ Z ∗ k = { u ∈ V k ∩ V ∗ k | du = 0 , d ∗ u = 0 } . An H -complex has the compactness property if V k ∩ V ∗ k is dense and compact in W k . This implies dim H k < ∞ . compactness property = ⇒ Fredholm = ⇒ closed 26 / 94
Two key properties of closed H-complexes Theorem (Hodge decomposition) For any closed Hilbert complex: W k = B k ✟ H k ✟ B ∗ � �� � k ���� Z k Z k ⊥ � �� � V k = B k ✟ H k ✟ Z k ⊥ V Theorem (Poincar´ e inequality) For any closed Hilbert complex, ∃ a constant c P s.t. z ∈ Z k ⊥ V . � z � V ≤ c P � dz � , 27 / 94
L 2 de Rham complex on Ω ⊂ R 3 W k d k V k d ∗ V ∗ dim H k k k k L 2 (Ω) H 1 L 2 β 0 0 grad 0 ˚ L 2 (Ω; R 3 ) H ( curl ) − div H ( div ) β 1 1 curl ˚ L 2 (Ω; R 3 ) H ( div ) H ( curl ) β 2 2 div curl ˚ L 2 (Ω) L 2 H 1 − grad 3 0 0 L 2 → 0 grad curl div 0 → H 1 − − → H ( curl ) − − → H ( div ) − → − div − grad H 1 ← 0 curl − ˚ − ˚ − ˚ 0 ← L 2 ← − − H ( div ) ← − H ( curl ) ← − − − 28 / 94
The abstract Hodge Laplacian d d L W k − 1 d ∗ W k + 1 L := d ∗ d + dd ∗ d ∗ W k W k − → W k ⇄ ⇄ D ( L k ) = { u ∈ V k ∩ V ∗ k + 1 , d ∗ u ∈ V k − 1 } k | du ∈ V ∗ H k ⊥ R ( L k ) N ( L k ) = H k , Strong formulation: Find u ∈ D ( L k ) s.t. Lu = f − P H f , u ⊥ H . Primal weak formulation: Find u ∈ V k ∩ V ∗ k ∩ H k ⊥ s.t. � du , dv � + � d ∗ u , d ∗ v � = � f − P H f , v � , v ∈ V k ∩ V ∗ k ∩ H k ⊥ . Mixed weak formulation. Find σ ∈ V k − 1 , u ∈ V k , and p ∈ H k s.t. τ ∈ V k − 1 , � σ, τ � − � u , d τ � = 0 , v ∈ V k , � d σ, v � + � du , dv � + � p , v � = � f , v � , q ∈ H k . � u , q � = 0 , 29 / 94
Equivalence and well-posedness Theorem Let f ∈ W k . Then u ∈ W k solves the strong formulation ⇐ ⇒ it solves the primal weak formulation. Moreover, in this case, if we set σ = d ∗ u and p = P H u, then the triple ( σ, u , p ) solves the mixed weak formulation. Finally, if some ( σ, u , p ) solves the mixed weak formulation, then σ = d ∗ u, p = P H u, and u solves the strong and primal formulations of the problem. Theorem For each f ∈ W k there exists a unique solution. Moreover � u � + � du � + � d ∗ u � + � dd ∗ u � + � d ∗ du � ≤ c � f − P H f � . e inequality constant c P . The constant depends only on the Poincar´ 30 / 94
Proof of well-posedness We used the mixed formulation. Set B ( σ, u , p ; τ, v , q ) = � σ, τ �−� u , d τ �−� d σ, v �−� du , dv �−� p , v �−� u , q � We must prove the inf-sup condition: ∀ ( σ, u , p ) ∃ ( τ, v , q ) s.t. B ( σ, u , p ; τ, v , q ) ≥ γ ( � σ � V + � u � V + � p � )( � τ � V + � v � V + � q � ) , with γ = γ ( c P ) > 0. Via the Hodge decomposition, u = u B + u H + u B ∗ = d ρ + u H + u B ∗ with ρ ∈ Z ⊥ V . Then take 1 τ = σ − ( c P ) 2 ρ, v = − u − d σ − p , q = p − u H . 31 / 94
Hodge Laplacian and Hodge decomposition f = dd ∗ u + P H f + d ∗ du is the Hodge decomposition of f Define K : W k → D ( L k ) by Kf = u (bdd lin op). P B = dd ∗ K , P B ∗ = d ∗ dK If f ∈ V , then Kdf = dKf . If f ∈ B , then dKf = 0. Since Kf ⊥ H , Kf ∈ B . B problem: If f ∈ B , then u = Kf solves dd ∗ u = f , du = 0 , u ⊥ H . B ∗ problem: If f ∈ B ∗ , then u = Kf solves d ∗ du = f , d ∗ u = 0 , u ⊥ H . 32 / 94
The Hodge Laplacian on a domain in 3D L 2 → 0 grad curl div 0 → H 1 − − → H ( curl ) − − → H ( div ) − → − div − grad H 1 ← 0 curl − ˚ − ˚ − ˚ 0 ← L 2 ← − − H ( div ) ← − H ( curl ) ← − − − L k = d ∗ d + dd ∗ V k − 1 × V k k BCs imposed on. . . − ∆ H 1 ∂ u /∂ n 0 H 1 × H ( curl ) curl curl − grad div u · n curl u × n 1 − grad div + curl curl u × n H ( curl ) × H ( div ) 2 div u H ( div ) × L 2 − ∆ 3 u essential BC for primal form. natural BC for primal form. 33 / 94
Approximation of Hilbert complexes
Why mixed methods? Naively, we might try to discretize the primal formulation with finite elements. This works in some circumstances, but we have seen two ways in which it can fail. It is not easy to construct a dense family of subspaces of the primal energy space V k ∩ V ∗ k ∩ H k . We therefore consider finite element discretizations of the mixed formulation: Given f ∈ W k , find σ ∈ V k − 1 , u ∈ V k , and p ∈ H k s.t. τ ∈ V k − 1 , � σ, τ � − � u , d τ � = 0 , v ∈ V k , � d σ, v � + � du , dv � + � p , v � = � f , v � , q ∈ H k . � u , q � = 0 , 34 / 94
Galerkin method Choose f.d. subspaces V j h ⊂ V j h = { dv | v ∈ V j − 1 Z j h = { v ∈ V j B j h | dv = 0 } ⊂ Z j } ⊂ B j h H j h = { v ∈ Z j h | v ⊥ B j h } Given f ∈ W k , find σ h ∈ V k − 1 , u h ∈ V k h , and p h ∈ H k h s.t. h τ ∈ V k − 1 � σ h , τ � − � u h , d τ � = 0 , , h v ∈ V k � d σ h , v � + � du h , dv � + � p h , v � = � f , v � , h , q ∈ H k � u h , q � = 0 , h . h � H k this is a nonconforming method . If H k For any choice of the V j h there exists a unique solution. However, the consistency, stability, and accuracy of the discrete solution depends vitally on the choice of subspaces. 35 / 94
Key assumptions h ⊂ V j (at least for j = k − 1 , k , k + 1) to We need the spaces V j satisfy three properties: 1. Approximation property: Of course V j h must afford good approximation of elements of V j . This can be formalized with respect to a family of subspaces parametrized by h by requiring w ∈ V j � w − v � V = 0 , h → 0 inf lim v ∈ V j h (or = O ( h r ) for w in some dense subspace, or . . . ) 2. Subcomplex property: dV k − 1 h ⊂ V k + 1 ⊂ V k h and dV k , so h h d d · · · → V k − 1 → V k + 1 → V k − − → · · · h h h is a subcomplex. 36 / 94
Bounded cochain projection 3. Bounded cochain projection: Most important, we assume that there exists a cochain map from the H-complex to the subcomplex which is a projection and is bounded . d d V k − 1 → V k + 1 − → V k − π k − 1 � π k � π k + 1 � h h h d d V k − 1 → V k + 1 → V k − − h h h For now, boundedness is in V -norm: � π h v � V ≤ c � v � V . But later we will need W -boundedness, which is a stronger requirement. A bounded projection is quasioptimal : v ∈ V j � v − π h v � V ≤ c inf � v − w � V , w ∈ V j h 37 / 94
First consequences from the assumptions From the subcomplex property d d · · · → V k − 1 → V k → V k + 1 − − · · · → h h h is itself a closed H-complex. (We take W k h = V k h but with the W -norm.) Therefore there is a discrete adjoint operator d ∗ h (its domain is all of W k h ), a discrete Hodge decomposition h ✟ B ∗ V k h = B k h ✟ H k kh . and a discrete Poincar´ e inequality z ∈ Z k ⊥ V � z � V ≤ c P h � dz � , . h 38 / 94
Preservation of cohomology Theorem Given: a closed H-complex, and a choice of f.d. subspaces satisfying the subcomplex property and admitting a V-bdd cochain projection π h . Assume also the (very weak) approximation property 0 � = q ∈ H k . � q − π h q � < � q � , Then π h induces an isomorphism from H k onto H k h . Moreover, � � H , H h ≤ sup � q − π h q � V . gap q ∈ H � q � = 1 � � v ∈ H h � u − v � V , sup u ∈ H � u − v � V gap ( H , H h ) := max . sup inf inf u ∈ H v ∈ H h � u � = 1 � v � = 1 39 / 94
Uniform Poincar´ e inequality and stability Theorem Given: a closed H-complex, and a choice of f.d. subspaces satisfying the subcomplex property and admitting a V-bdd cochain projection π h . Then v ∈ Z k ⊥ � v � V ≤ c P � π h �� dv � V , ∩ V k h . h Corollary (Stability and quasioptimality of the mixed method) The mixed method is stable (uniform inf-sup condition) and satisfies � σ − σ h � V + � u − u h � V + � p − p h � ≤ C ( � σ − τ � V + inf � u − v � V + inf � p − q � V inf τ ∈ V k − 1 v ∈ V k q ∈ V k h h h + µ inf � P B u − v � V ) , v ∈ V k h where µ = µ h = � ( I − π h ) r � . sup r ∈ H k , � r � = 1 40 / 94
Improved error estimates In addition to µ = � ( I − π h ) P H � , define δ, η = o ( 1 ) by η = � ( I − π h ) d [ ∗ ] K � Lin ( W , W ) . δ = � ( I − π h ) K � Lin ( W , W ) , � O ( h 2 ) , r > 0 , µ = O ( h r + 1 ) , When V k h ⊃ P r , η = O ( h ) , δ = O ( h ) , r = 0 , Theorem Given: an H-complex satisfying the compactness property, and a choice of f.d. subspaces satisfying the subcomplex property and admitting a W-bdd cochain projection π h . Then � d ( σ − σ h ) � ≤ cE ( d σ ) , � σ − σ h � ≤ c [ E ( σ ) + η E ( d σ )] , � d ( u − u h ) � ≤ c { E ( du ) + η [ E ( d σ ) + E ( p )] } , � u − u h � ≤ c { E ( u ) + η [ E ( du ) + E ( σ )] +( η 2 + δ )[ E ( d σ ) + E ( p )] + µ E ( P B u ) } . 41 / 94
Numerical tests − grad div u + curl rot u = f in Ω (unit square) , u · n = rot u = 0 on ∂ Ω (magnetic BC) → L 2 → 0 grad rot 0 → H 1 − − → H ( rot ) − σ h ∈ V 0 h ⊂ H 1 , u h ∈ V 1 h ⊂ H ( rot ) τ ∈ V k − 1 � σ h , τ � − � u h , grad τ � = 0 , , h v ∈ V k � grad σ h , v � + � rot u h , rot v � + � p h , v � = � f , v � , h , q ∈ H k � u h , q � = 0 , h . V 0 V 1 V 2 h Lagrange R-T h DG h All hypotheses are met. . . 42 / 94
Numerical solution of vector Laplacian, magnetic BC � σ − σ h � �∇ ( σ − σ h ) � � u − u h � rate � rot ( u − u h ) � rate rate rate 2.16e-04 3.03 2.63e-02 1.98 2.14e-03 1.99 1.17e-02 1.99 2.70e-05 3.00 6.60e-03 1.99 5.37e-04 1.99 2.93e-03 2.00 3.37e-06 3.00 1.65e-03 2.00 1.34e-04 2.00 7.33e-04 2.00 4.16e-07 3.02 4.14e-04 2.00 3.36e-05 2.00 1.83e-04 2.00 3 2 2 2 43 / 94
Numerical solution of vector Laplacian, Dirichlet BC For Dirichlet boundary conditions, σ = − div u is sought in H 1 , u is sought in ˚ H ( rot ) (the BC u · t = 0 is essential, u · n = 0 is natural). There is no complex, so our theory does not apply. � σ − σ h � rate �∇ ( σ − σ h ) � rate � u − u h � rate � rot ( u − u h ) � rate 1.90e-02 1.62 2.53e+00 0.63 1.22e-03 2.01 1.55e-02 1.58 6.36e-03 1.58 1.68e+00 0.60 3.05e-04 2.00 5.33e-03 1.54 2.18e-03 1.54 1.14e+00 0.56 7.63e-05 2.00 1.85e-03 1.52 7.58e-04 1.52 7.89e-01 0.53 1.91e-05 2.00 6.49e-04 1.51 1.5 0.5 2 1.5 DNA-Falk-Gopalakrishnan M3AS 2011 44 / 94
Eigenvalue problems Find λ ∈ R , 0 � = u ∈ D ( L ) s.t. Lu = λ u , u ⊥ H λ � u � 2 = � du � 2 + � d ∗ u � 2 > 0 λ > 0 and Ku = λ − 1 u . so By the compactness property, K : W k → W k is compact and self-adjoint, so 0 < λ 1 ≤ λ 2 ≤ · · · → ∞ . Denote by v i corresponding orthonormal eigenvalues, E i = R v i . Mixed discretization: 0 � = ( σ h , u h , p h ) ∈ V k − 1 λ h ∈ R , × V k h × H k Find s.t. h h τ ∈ V k − 1 � σ h , τ � − � u h , d τ � = 0 , , h v ∈ V k � d σ h , v � + � du h , dv � + � p h , v � = λ h � u h , v � , h , q ∈ H k � u h , q � = 0 , h . 0 < λ 1 h ≤ λ 2 h ≤ . . . ≤ λ N h h , E ih = R v ih v ih orthonormal, 45 / 94
Convergence of eigenvalue problems Let � m ( j ) i = 1 E i be the span of the eigenspaces of the first j distinct eigenvalues. The method converges if ∀ j , ǫ > 0, ∃ h 0 > 0 s.t. � m ( j ) � m ( j ) � � 1 ≤ i ≤ m ( j ) | λ i − λ ih | ≤ ǫ E i , ≤ ǫ if h ≤ h 0 . max and gap E i , h i = 1 i = 1 A sufficient (and necessary) condition for eigenvalue convergence is operator norm convergence of the discrete solution operator K h P h to K (Kato, Babuska–Osborn, Boffi–Brezzi–Gastaldi): W → W h orthog. The mixed discretization of the eigenvalue problem converges if h → 0 � K h P h − K � L ( W , W ) = 0 . lim 46 / 94
Eigenvalue convergence follows from improved estimates � u − u h � ≤ c { E ( u )+ η [ E ( du )+ E ( σ )]+( η 2 + δ )[ E ( d σ )+ E ( p )]+ µ E ( P B u ) } E ( d σ ) + E ( p ) + E ( P B u ) ≤ � d σ � + � p � + � u � ≤ � f � E ( u ) ≤ δ � f � , E ( du ) + E ( σ ) ≤ η � f � Therefore � ( K − K h P h ) f � ≤ δ + η 2 + µ → 0 Rates of convergence also follow, included doubled convergence rates for eigenvalues. . . 47 / 94
Exterior calculus
The de Rham complex for a domain in R n d / dx 0 → C ∞ (Ω) → C ∞ (Ω) → 0 − − − 1-D: grad rot 0 → C ∞ (Ω) → C ∞ (Ω , R 2 ) → C ∞ (Ω) → 0 − − − 2-D: grad curl div 0 → C ∞ (Ω) → C ∞ (Ω , R 3 ) → C ∞ (Ω , R 3 ) → C ∞ (Ω) → 0 − − − − − 3-D: d d d d 0 → Λ 0 (Ω) → Λ 1 (Ω) → Λ 2 (Ω) → Λ n (Ω) → 0 − − − → · · · − n -D: The space Λ k (Ω) = C ∞ (Ω , R n ×···× n ) , the space of smooth skw differential k-forms on Ω . d k : Λ k (Ω) → Λ k + 1 (Ω) Exterior derivative: � f v ∈ R Integral of a k-form over an oriented k-simplex: � � u ∈ Λ k , c ∈ C k c du = Stokes theorem: ∂ c u , All this works on any smooth manifold 48 / 94
Exterior algebra Multilinear forms on an n -dimensional vector space V k times � �� � Lin k V : Lin 0 V := R k -linear maps ω : V × · · · × V → R Lin 1 V = V ∗ covectors, 1-forms ( ω ⊗ µ )( v 1 , . . . , v j + k ) = ω ( v 1 , . . . , v j ) µ ( v j + 1 , . . . , v j + k ) tensor product: dim Lin k V = n k dual basis for Lin 1 R n : dx 1 ,. . . , dx n with dx i ( e j ) = δ ij basis for Lin k R n : dx σ 1 ⊗ · · · ⊗ dx σ k , 1 ≤ σ 1 , . . . , σ k ≤ n Alternating multilinear forms (algebraic k -forms) ω ∈ Alt k V if ω ( . . . , v i , . . . , v j , . . . ) = − ω ( . . . , v j , . . . , v i , . . . ) � n � dim Alt k V = k � 1 ( skw ω )( v 1 , . . . , v k ) = σ ∈ Σ k sign ( σ ) ω ( v σ 1 , . . . , v σ k ) skew part: k ! � j + k � ω ∧ µ = skw ( ω ⊗ µ ) exterior product: j dx σ 1 ∧ · · · ∧ dx σ k , basis for Alt k R n : 1 ≤ σ 1 < . . . < σ k ≤ n 49 / 94
Exterior algebra continued If ω ∈ Alt k V , v ∈ V , the interior product ω � v ∈ Alt k − 1 V is ω � v ( v 1 , . . . , v k − 1 ) = ω ( v , v 1 , . . . , v k − 1 ) ( ω ∧ η ) � v = ( ω � v ) ∧ η ± ω ∧ ( η � v ) If V has an inner product , pick any orthonormal basis v 1 , . . . , v n and define � ω, η � = � ω, η ∈ Alt k V σ ω ( v σ ( 1 ) , . . . , v σ ( k ) ) η ( v σ ( 1 ) , . . . , v σ ( k ) ) , (sum over σ : { 1 , . . . , k } → { 1 , . . . , n } increasing). dim Alt n V = 1. Fix the volume form by vol ( v 1 , . . . , v n ) = ± 1. An orientation for V fixes the sign. ∼ = ⋆ : Alt k V → Alt n − k V defined by − Hodge star: ω ∈ Alt k V , µ ∈ Alt n − k V ω ∧ µ = � ⋆ω, µ � vol , ⋆ ⋆ ω = ± ω On R n , vol = dx 1 ∧ · · · ∧ dx n = det, ⋆ dx σ 1 ∧ · · · ∧ dx σ k = ± dx σ ∗ 1 ∧ · · · ∧ dx σ ∗ n − k If L : V → W linear, L ∗ : Alt k W → Alt k V is defined Pullback: L ∗ ω ( w 1 , . . . , w k ) = ω ( Lw 1 , . . . , Lw n ) 50 / 94
Exterior algebra in R 3 Alt 0 R 3 = R c ↔ c ∼ = Alt 1 R 3 → R 3 − u 1 dx 1 + u 2 dx 2 + u 3 dx 3 ↔ u ∼ vector proxy = Alt 2 R 3 → R 3 − u 1 dx 2 ∧ dx 3 − u 2 dx 1 ∧ dx 3 + u 3 dx 1 ∧ dx 2 ↔ u ∼ = Alt 3 R 3 → R − c ↔ c dx 1 ∧ dx 2 ∧ dx 3 ∧ : Alt 1 R 3 × Alt 1 R 3 → Alt 2 R 3 × : R 3 × R 3 → R 3 exterior prod. ∧ : Alt 1 R 3 × Alt 2 R 3 → Alt 3 R 3 · : R 3 × R 3 → R L ∗ : Alt 0 R 3 → Alt 0 R 3 id : R → R L ∗ : Alt 1 R 3 → Alt 1 R 3 L T : R 3 → R 3 pullback L ∗ : Alt 2 R 3 → Alt 2 R 3 adj L : R 3 → R 3 L ∗ : Alt 3 R 3 → Alt 3 R 3 ( det L ) : R → R ( c �→ c det L ) � v : Alt 1 R 3 → Alt 0 R 3 v · : R 3 → R � v : Alt 2 R 3 → Alt 1 R 3 v × : R 3 → R 3 interior prod. � v : Alt 3 R 3 → Alt 2 R 3 v : R → R 3 ( c �→ cv ) inner product on Alt k R 3 dot product on R and R 3 inner prod. ⋆ : Alt 0 R 3 → Alt 3 R 3 id : R → R Hodge star ⋆ : Alt 1 R 3 → Alt 2 R 3 id : R 3 → R 3 51 / 94
Exterior calculus A differential k-form on a manifold M is a map x ∈ M �→ ω x ∈ Alt k T x M . ω takes a point x ∈ M and k -tangent vectors and returns a number. 0-forms are functions, 1-forms are covector fields. We write ω ∈ Λ k ( M ) or C Λ k ( M ) if its continuous, C ∞ Λ k ( M ) if its smooth, etc. ω : Ω → Alt k R n . If M = Ω ⊂ R n , The general element of Λ k (Ω) is ω = � σ a σ dx σ 1 ∧ · · · ∧ dx σ k with a σ : Ω → R . x : T x M → T x M ′ and so A smooth map φ : M → M ′ , induces a linear maps φ ′ a pullback φ ∗ : Λ k ( M ′ ) → Λ k ( M ) on differential forms: � � ∗ ω φ ( x ) ( φ ∗ ω ) x = φ ′ ( φ ∗ ω ) x ( v 1 , . . . , v k ) = ω φ ( x ) φ ′ x v 1 , . . . , φ ′ or x v k x φ ∗ ( ω ∧ µ ) = ( φ ∗ ω ) ∧ ( φ ∗ µ ) pullback of inclusion defines trace For ω = a dx σ 1 ∧ · · · ∧ dx σ k ∈ Λ k (Ω) , the exterior derivative � � n ∂ a σ ∂ x k dx k ∧ dx σ 1 ∧ · · · ∧ dx σ k ∈ Λ k + 1 (Ω) . d ω = It satisfies σ k = 1 d ◦ d = 0, d ( ω ∧ µ ) = ( d ω ) ∧ µ ± ω ∧ d µ , φ ∗ ( d ω ) = d ( φ ∗ ω ) We may use any coordinate chart to define d : Λ k ( M ) → Λ k + 1 ( M ) . 52 / 94
Exterior calculus continued A differential n -form on an oriented n -dim’l manifold M may be integrated � ω ∈ R , ω ∈ Λ n ( M ) very geometrically (w/o requiring a metric or measure): M � � M φ ∗ ω = M ′ ω , ω ∈ Λ n ( M ′ ) if φ preserves orientation. For ω = f ( x ) vol on Ω ⊂ R n we get what notation suggests. � � ω ∈ Λ k − 1 (Ω) d ω = tr ω, Stokes theorem: Ω ∂ Ω Combining with Leibniz, we get the integration by parts formula � � � ω ∈ Λ k (Ω) , η ∈ Λ n − k − 1 (Ω) d ω ∧ η = ± ω ∧ d η + tr ω ∧ tr η, Ω Ω ∂ Ω For M an oriented Riemannian manifold we have inner prod and ⋆ on � � Alt k T x M and can define: � ω, η � L 2 Λ k = � ω x , η x � vol = ω ∧ ⋆ η Ω This allows us to rewrite the integration by parts formula � ω ∈ Λ k − 1 , µ ∈ Λ k , � d ω, µ � = � ω, δµ � + tr ω ∧ tr ⋆µ, ∂ Ω where δµ := ± ⋆ d ⋆ µ is the coderivative operator. 53 / 94
Vector proxies in R n n − 1 k 0 1 n Λ k (Ω) functions vector fields vector fields functions Λ k ( ∂ Ω) functions tang vctr flds functions 0 tr : Λ k (Ω) → Λ k ( ∂ Ω) u | ∂ Ω π t u | ∂ Ω u | ∂ Ω · n 0 d : Λ k (Ω) → Λ k + 1 (Ω) grad curl div 0 δ : Λ k (Ω) → Λ k − 1 (Ω) − div − grad 0 curl � � � � f : Λ k (Ω) → R u ( f ) f u · t d H 1 f u · n d H n − 1 f u d H n φ ∗ : Λ k (Ω ′ ) → Λ k (Ω) ( φ ′ ( adj φ ′ ( det φ ′ u ◦ φ x ) T ( u ◦ φ ) x )( u ◦ φ ) x )( u ◦ φ ) dim f = k Piola transform φ : Ω → Ω ′ 54 / 94
L 2 differential forms on a domain in R n Ω ⊂ R n Lipschitz boundary H Λ k := { u ∈ L 2 Λ k | du ∈ L 2 Λ k + 1 } H ∗ Λ k = { u ∈ L 2 Λ k | δ u ∈ L 2 Λ k − 1 } = ⋆ H Λ n − k ⇒ tr u ∈ H − 1 / 2 Λ k ( ∂ Ω) u ∈ H Λ k (Ω) = u ∈ H ∗ Λ k (Ω) = ⇒ tr ⋆ u ∈ H − 1 / 2 Λ n − k ( ∂ Ω) H Λ k = { u ∈ H Λ k | tr u = 0 } , H ∗ Λ k = { u ∈ H ∗ Λ k | tr ⋆ u = 0 } ˚ ˚ Theorem If we view d as an unbdd operator L 2 Λ k → L 2 Λ k + 1 with domain H Λ k , then d ∗ = δ with domain ˚ H ∗ Λ k . Consequently H k = { ω ∈ L 2 Λ k | d ω = 0 , δω = 0 , tr ⋆ω = 0 } . 55 / 94
L 2 de Rham complex on a domain in R n L 2 de Rham complex: → H Λ n → 0 d d d 0 → H Λ 0 → H Λ 1 − − → · · · − Dual complex: H ∗ Λ n ← 0 δ δ δ 0 ← ˚ H ∗ Λ 0 − ˚ H ∗ Λ 1 − ˚ ← ← − · · · ← Theorem (R. Picard ’84) For a domain (or Riemannian manifold) w/ Lipschitz boundary the H Λ k ∩ ˚ H ∗ Λ k is compact in L 2 Λ k . compactness property holds: compactness property = ⇒ Fredholm = ⇒ closed 56 / 94
Finite element spaces of differential forms
Finite element spaces Goal: define finite element spaces Λ k h ⊂ H Λ k (Ω) satisfying the hypotheses of approximation, subcomplexes, and bounded cochain projections. A FE space is constructed by assembling three ingredients: Ciarlet ’78 A triangulation T consisting of polyhedral elements T For each T , a space of shape functions V ( T ) , typically polynomial For each T , a set of DOFs : a set of functionals on V ( T ) , each associated to a face of T . These must be unisolvent , i.e., form a basis for V ( T ) ∗ . The FE space V h is defined as functions piecewise in V ( T ) with DOFs single-valued on faces. The DOFs determine (1) the interelement continuity, and (2) a projection operator into V h . 57 / 94
Example: H Λ 0 = H 1 : the Lagrange finite element family Elements T ∈ T h are simplices in R n . Shape fns: V ( T ) = P r ( T ) , some r ≥ 1. � DOFs: u �→ f ( tr f u ) q , q ∈ P r − d − 1 ( f ) , f ∈ ∆( T ) , d = dim f v ∈ ∆ 0 ( T ) : u �→ u ( v ) � e ∈ ∆ 1 ( T ) : u �→ e ( tr e u ) q , q ∈ P r − 2 ( e ) � f ∈ ∆ 2 ( T ) : u �→ f ( tr f u ) q , q ∈ P r − 3 ( f ) � u �→ T uq , q ∈ P r − 4 ( T ) T : Theorem The number of DOFs = dim P r ( T ) and they are unisolvent. The imposed continuity exactly forces inclusion in H 1 . 58 / 94
Unisolvence for Lagrange elements in n dimensions � Shape fns: V ( T ) = P r ( T ) , DOFs: u �→ f ( tr f u ) q , q ∈ P r − d − 1 ( f ) , d = dim f #∆ d ( T ) dim P r − d − 1 ( f d ) dim P r ( T ) DOF count: � �� � � � � n n + 1 r − 1 r + n = dim P r ( T ) . # DOF = = d + 1 d n d = 0 Unisolvence proved by induction on dimension ( n = 1 is obvious). Suppose u ∈ P r ( T ) and all DOFs vanish. Let f be a facet of T . Note tr f u ∈ P r ( f ) the DOFs associated to f and its subfaces applied to u coincide with the Lagrange DOFs in P r ( f ) applied to tr f u Therefore tr f u vanishes by the inductive hypothesis. Thus u = ( � n p ∈ P r − n − 1 ( T ) . Choose q = p in the interior i = 0 λ i ) p , DOFs to see that p = 0. 59 / 94
Polynomial differential forms � P r Λ k (Ω) σ a σ dx σ 1 ∧ · · · ∧ dx σ k , a σ ∈P r (Ω) Polynomial diff. forms: H r Λ k (Ω) Homogeneous polynomial diff. forms: � �� � � �� � r + n r + n r + k n dim P r Λ k = = r + k r k k � �� � � �� � r + n − 1 r + n r + k n n dim H r Λ k = = n + r r + k r k k (Homogeneous) polynomial de Rham subcomplex: → P r − n Λ n − d d d →P r Λ 0 → P r − 1 Λ 1 0 − − − → · · · − → 0 → H r − n Λ n − d d d →H r Λ 0 → H r − 1 Λ 1 0 − − − → · · · − → 0 60 / 94
The Koszul complex For x ∈ Ω ⊂ R n , T x Ω may be identified with R n , so the identity map can be viewed as a vector field. The Koszul differential κ : Λ k → Λ k − 1 is the contraction with the κω = ω � id. identity: Applied to polynomials it increases degree. κ ◦ κ = 0 giving the Koszul complex: κ → · · · P r + n Λ 0 − κ → P r + 1 Λ n − 1 →P r Λ n 0 − − − → 0 κ dx i = x i , κ ( ω ∧ µ ) = ( κω ) ∧ µ ± ω ∧ ( κµ ) κ ( f dx σ 1 ∧ · · · ∧ dx σ k ) = f � k i = 1 ( − ) i dx σ 1 ∧ · · · � dx σ i · · · ∧ dx σ k 3D Koszul complex: × x → P r + 3 Λ 0 − x · x →P r Λ 3 → P r + 1 Λ 2 → P r + 2 Λ 1 0 − − − − − → 0 Theorem (Homotopy formula) ω ∈ H r Λ k . ( d κ + κ d ) ω = ( r + k ) ω, 61 / 94
Proof of the homotopy formula ω ∈ H r Λ k , ω ∈ H r Λ k ( d κ + κ d ) ω = ( r + k ) ω, Proof by induction on k . k = 0 is Euler’s identity. Assume true for ω ∈ H r Λ k − 1 , and verify it for ω ∧ dx i . d κ ( ω ∧ dx i ) = d ( κω ∧ dx i + ( − 1 ) k − 1 ω ∧ x i ) = d ( κω ) ∧ dx i + ( − 1 ) k − 1 ( d ω ) ∧ x i + ω ∧ dx i . κ d ( ω ∧ dx i ) = κ ( d ω ∧ dx i ) = κ ( d ω ) ∧ dx i + ( − 1 ) k d ω ∧ x i . ( d κ + κ d )( ω ∧ dx i ) = [( d κ + κ d ) ω ] ∧ dx i + ω ∧ dx i = ( r + k )( ω ∧ dx i ) . 62 / 94
Consequences of the homotopy formula The polynomial de Rham complex is exact (except for constant 0-forms in the kernel). The Koszul complex is exact (except for constant 0-forms in the coimage). κ d ω = 0 = ⇒ d ω = 0, d κω = 0 = ⇒ κω = 0 H r Λ k = κ H r − 1 Λ k + 1 ⊕ d H r + 1 Λ k − 1 r Λ k = P r − 1 Λ k + κ H r − 1 Λ k + 1 Define P − else P r − 1 Λ k � P − r Λ k � P r Λ k r Λ 0 = P r Λ 0 , r Λ n = P r − 1 Λ n , P − P − � �� � r + k − 1 r + n r r Λ k = dim P − r + k dim P r Λ k = r + k k R ( d |P − r Λ k ) = R ( d |P r Λ k ) , N ( d |P − r Λ k ) = N ( d |P r − 1 Λ k ) The complex (with constant r ) r Λ n → 0 d d d 0 → P − → P − → P − r Λ 0 r Λ 1 − − → · · · − is exact (except for constant 0-forms). 63 / 94
Complexes mixing P r and P − r On an n -D domain there are 2 n − 1 complexes beginning with P r Λ 0 (or ending with P r Λ n ). At each step we have two choices: P − P − r Λ k r Λ k P r Λ k − 1 or P − r Λ k − 1 P r − 1 Λ k P r − 1 Λ k In 3-D: → P r − 1 Λ 3 → 0 . d d d → P − → P − 0 → P r Λ 0 r Λ 1 r Λ 2 − − − → P r − 2 Λ 3 → 0 , d d d → P − 0 → P r Λ 0 r Λ 1 → P r − 1 Λ 2 − − − → P r − 2 Λ 3 → 0 , d d d → P − 0 → P r Λ 0 → P r − 1 Λ 1 r − 1 Λ 2 − − − → P r − 3 Λ 3 → 0 , d d d 0 → P r Λ 0 → P r − 1 Λ 1 → P r − 2 Λ 2 − − − 64 / 94
r Λ k family of simplicial FE differential forms The P − Given: a mesh T h of simplices T , r ≥ 1, 0 ≤ k ≤ n , we define P − r Λ k ( T h ) via: P − r Λ k ( T ) Shape fns: DOFs: � q ∈ P r + k − d − 1 Λ d − k ( f ) , f ∈ ∆( T ) , u �→ ( tr f u ) ∧ q , d = dim f ≥ k f Theorem The number of DOFs = dim P − r Λ k ( T ) and they are unisolvent. The imposed continuity exactly enforces inclusion in H Λ k . 65 / 94
Dimension count � #∆ d ( T ) dim P r + k − d − 1 Λ k ( R d ) #DOFs = d ≥ k � �� �� � � n + 1 r + k − 1 d = d + 1 d k d ≥ k � �� �� � � r + k − 1 n + 1 j + k = j + k + 1 j + k j j ≥ 0 Simplify using the identities � �� � � �� � � �� � � � � a − c a + c a b a a c = = a − b b + j a − b b c c j j ≥ 0 to get � �� � r + n r + k − 1 = dim P − r Λ k #DOFs = r + k k 66 / 94
Proof of unisolvence for P − r Λ k Lemma � If u ∈ ˚ P r − 1 Λ k ( T ) and − 1 Λ n − k ( T ) , then u = 0 . T u ∧ q = 0 ∀ q ∈ P r + k − n Proof: This can be proved by an explicit choice of test function. Proof of unisolvence: Suppose u ∈ P − r Λ k ( T ) and all the DOFS � q ∈ P r + k − d − 1 Λ d − k ( f ) , f ∈ ∆( T ) . f ( tr f u ) ∧ q = 0 , vanish: Then tr f u ∈ P − r Λ k ( f ) and all its DOFs vanish. By induction on dimension, tr u vanishes on the boundary. So we need to show: � u ∈ ˚ P − r Λ k ( T ) , 1 Λ n − k ( T ) = T u ∧ q = 0 ∀ q ∈ P r + ⇒ u = 0 k − n − In view of lemma, we just need to show u ∈ P r − 1 Λ k ( T ) . By the homotopy formula, u ∈ P − r Λ k , du = 0 = ⇒ u ∈ P r − 1 Λ k . So it remains to show that du = 0. du ∈ ˚ P r − 1 Λ k + 1 ( T ) , � � T u ∧ dp = 0 ∀ p ∈ P r + k − n Λ n − k − 1 ( T ) . T du ∧ p = ± Therefore du = 0 by the lemma (with k → k + 1). 67 / 94
The P r Λ k family of simplicial FE differential forms Given: a mesh T h of simplices T , r ≥ 1, 0 ≤ k ≤ n , we define P r Λ k ( T h ) via: P r Λ k ( T ) Shape fns: DOFs: � q ∈ P − r + k − d Λ d − k ( f ) , f ∈ ∆( T ) , u �→ ( tr f u ) ∧ q , d = dim f ≥ k f Theorem The number of DOFs = dim P r Λ k ( T ) and they are unisolvent. The imposed continuity exactly enforces inclusion in H Λ k . 68 / 94
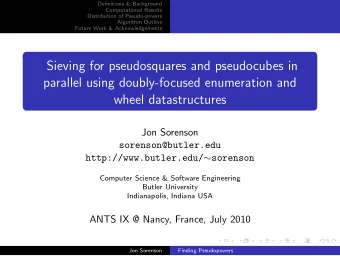
The P − r family in 2D P − P − P − r Λ 0 r Λ 1 r Λ 2 Lagrange Raviart-Thomas ’76 DG r = 1 r = 2 r = 3 69 / 94
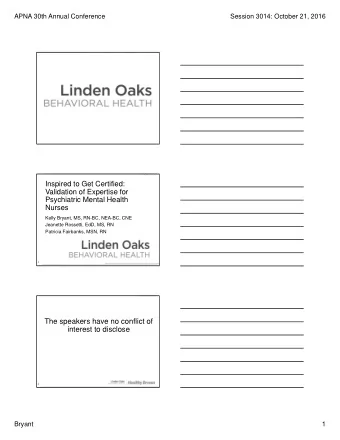
r Λ k family in 3D The P − P − P − P − P − r Λ 0 r Λ 1 r Λ 2 r Λ 3 Lagrange N´ ed´ elec ’80 N´ ed´ elec ’80 DG r = 1 r = 2 r = 3 70 / 94
The P r Λ k family in 2D P r Λ 0 P r Λ 1 P r Λ 2 Lagrange Brezzi-Douglas-Marini ’85 DG r = 1 r = 2 r = 3 71 / 94
The P r Λ k family in 3D P r Λ 0 P r Λ 1 P r Λ 2 P r Λ 3 Lagrange N´ ed´ elec ’86 N´ ed´ elec ’86 DG r = 1 r = 2 r = 3 72 / 94
Application of the P r and P − r families to the Hodge Laplacian The shape function spaces P r Λ k ( T ) and P − r Λ k ( T ) combine into de Rham subcomplexes. The DOFs connect these spaces across elements to create subspaces of H Λ k (Ω) . Therefore the assembled finite element spaces P r Λ k ( T h ) and r Λ k ( T h ) combine into de Rham subcomplexes (in 2 n − 1 ways). P − The DOFs of freedom determine projections from Λ k (Ω) into the finite element spaces. From Stokes thm, these commute with d . Suitably modified, we obtain bounded cochain projections. Thus the abstract theory applies. We may use any two adjacent spaces in any of the complexes. P r Λ k − 1 ( T ) P − r Λ k ( T ) d − → or or P − r Λ k − 1 ( T ) P r − 1 Λ k ( T ) 73 / 94
Rates of convergence Rates of convergence are determined by the improved error estimates from the abstract theory. They depend on The smoothness of the data f . The amount of elliptic regularity. The degree of of complete polynomials contained in the finite element spaces. The theory delivers the best possible results: with sufficiently smooth data and elliptic regularity, the rate of convergence for each of the quantities u , du , σ , d σ , and p in the L 2 norm is the best possible given the degree of polynomials used for that quantity. Eigenvalues converge as O ( h 2 r ) . 74 / 94
Historical notes The P − 1 Λ k complex is in Whitney ’57 (Bossavit ’88). In ’76, Dodziuk and Patodi defined a finite difference approximation based on the Whitney forms to compute the eigenvalues of the Hodge Laplacian, and proved convergence. In retrospect, that method can be better viewed as a mixed finite element method. This was a step on the way to proving the Ray-Singer conjecture, completed in ’78 by W. Miller. The P r Λ k complex is in Sullivan ’78. r Λ k spaces in ’99. Hiptmair gave a uniform treatment of the P − The unified treatment and use of the Koszul complex is in DNA-Falk-Winther ’06. 75 / 94
Bounded cochain projections The DOFs defining P r Λ k ( T h ) and P − r Λ k ( T h ) determine canonical projection operators Π h from piecewise smooth forms in H Λ k onto Λ k h . However, Π h is not bounded on H Λ k (much less uniformly bounded wrt h ). Π h is bounded on C Λ k . If we have a smoothing operator R ǫ, h ∈ Lin ( L 2 Λ k , C Λ k ) such that R ǫ, h commutes with d , we can define Q ǫ, h = Π h R ǫ, h and obtain a bounded operator L 2 Λ k → Λ k h which commutes with d (as suggested by Christiansen). However Q h will not be a projection. We correct this by using Sch¨ oberl’s trick: if the finite dimensional operator h : Λ k h → Λ k Q ǫ, h | Λ k h is invertible, then h ) − 1 Q ǫ, h , π h := ( Q ǫ, h | Λ k is a bounded commuting projection. It remains to get uniform bds on π h . 76 / 94
The two key estimates For this we need two key estimates for Q ǫ, h := Π h R ǫ, h : For fixed ǫ , Q ǫ, h is uniformly bounded: ∀ ǫ > 0 suff. small ∃ c ( ǫ ) > 0 s.t. � Q ǫ, h � Lin ( L 2 , L 2 ) ≤ c ( ǫ ) sup h ǫ → 0 � I − Q ǫ, h � Lin ( L 2 , L 2 ) = 0 lim uniformly in h Theorem Suppose that these two estimates hold and define h ) − 1 Q ǫ, h , where Λ k h is either P r Λ k ( T h ) or P − r + 1 Λ k ( T h ) . π h := ( Q ǫ, h | Λ k Then, for h sufficiently small, π h is a cochain projection onto Λ k h and � ω − π h ω � ≤ ch s � ω � H s Λ k , ω ∈ H s Λ k , 0 ≤ s ≤ r + 1 . 77 / 94
The smoothing operator The simplest definition is to take R ǫ, h u to be an average over y ∈ B 1 of ( F y ǫ, h ) ∗ u where F y ǫ, h ( x ) = x + ǫ hy : � ρ ( y )[( F y eh ) ∗ u ]( x ) dy R ǫ, h u ( x ) = B 1 Needs modification near the boundary and for non-quasiuniform meshes. The key estimates can be proven using macroelements and scaling. 78 / 94
Bases for the spaces
Bases Since the DOFs determine a basis for the dual space of a FE space, there is a corresponding basis for the FE space. An alternative is to use the Bernstein basis fns which are given explicitly in terms of the barycentric coordinates λ i : 1 1 0 0 1 2 0 1 2 1 0 1 3 3 3 3 0 λ j Bernstein basis functions λ i Basis of P 3 dual to the nodal DOFs. 1 . r Λ k and P r Λ k families in n -dimensions, there is of course For the P − again the basis determined by the DOFs. In addition, there is an explicit basis analogous to the Bernstein basis (DNA-Falk-Winter 2009). 79 / 94
Some computations with barycentric coordinates The barycentric coordinates λ 0 , . . . , λ n form the dual basis for P 1 ( T ) = P − 1 Λ 0 ( T ) d λ 1 ∧ · · · ∧ d λ n = c vol ∈ Alt n T with c = ( d λ 1 ∧ · · · ∧ d λ n )( x 1 − x 0 , . . . , x n − x 0 ) 1 = vol ( x 1 − x 0 , . . . , x n − x 0 ) n ! | T | d λ i ∧ . . . ∧ d λ n = ( − 1 ) i d λ 0 ∧ . . . ∧ � More generally, n ! | T | vol. κ d λ i = λ i − λ i ( 0 ) , so � k ( − 1 ) i λ σ i d λ σ 0 ∧ . . . ∧ � κ ( d λ σ 0 ∧ · · · ∧ d λ σ k ) = d λ σ i ∧ . . . ∧ d λ σ k + ψ, i = 0 ψ ∈ P 0 Λ k . 80 / 94
The Whitney forms Define the Whitney form associated to the k -face f with vertices x σ 0 , . . . , x σ k by � k ( − 1 ) i λ σ i d λ σ 0 ∧ . . . ∧ � d λ σ i ∧ . . . ∧ d λ σ k ∈ P − 1 Λ k φ f = i = 0 vertices: λ i λ i d λ j − λ j d λ i edges: λ i d λ j ∧ d λ k − λ j d λ i ∧ d λ k + λ k d λ i ∧ d λ j triangles: etc. � � 0 , g � = f , If f , g ∈ ∆ k ( T ) then tr g φ f = 1 / k ! , g = f g ∴ after normalization, the Whitney forms are a basis for P − 1 Λ k dual to the DOFs. 81 / 94
Explicit geometric bases The Bernstein basis is an explicit alternative to the Lagrange basis for the Lagrange finite elts. P r = span { λ α := λ α 0 0 · · · λ α n n | | α | = r } P r ( T , f ) := span { λ α | supp α = { σ 0 , . . . , σ k } , | α | = r } � P r ( T ) = P r ( T , f ) f ∼ = ˚ P r ( f ) ∼ P r ( T , f ) − → = P r − dim f − 1 ( f ) � �� � tr � �� � There are similar geometric bases for all k : � ∼ = P r Λ k ( f ) ∼ ˚ P r Λ k ( T ) = P r Λ k ( T , f ) , P r Λ k ( T , f ) = P − r + k − dim f Λ dim f − k ( f ) − → tr dim f ≥ k � ∼ = ˚ r Λ k ( f ) ∼ P − P − r Λ k ( T , f ) , P − P − = P r + k − dim f − 1 Λ dim f − k ( f ) r Λ k ( T ) = r Λ k ( T , f ) − → tr dim f ≥ k 82 / 94
Basis for P − r Λ k r Λ k (the easier case), we consider all products To create a basis for P − � α i = r − 1 λ α 0 0 · · · λ α n n φ f , f ∈ ∆ k ( T ) , This form is associated the the face whose vertices are in f or for which α i > 0. E.g., λ 2 3 φ [ 1 , 2 ] is associated with the face [ 1 , 2 , 3 ] . These span P − r Λ k . However they are not linearly independent since � k ( − 1 ) i λ σ i φ [ σ 0 ··· � σ i ··· σ k ] = 0 . i = 0 To get a linearly independent spanning set, we impose the extra condition that if α i � = 0 then i ≥ σ 0 (the least vertex index of f ). E.g., 3 Λ 2 but 3 φ [ 1 , 2 ] are included in the basis for P − λ 1 λ 2 φ [ 1 , 2 ] and λ 2 λ 0 λ 3 φ [ 1 , 2 ] is not. 83 / 94
r Λ 1 and P − r Λ 2 on a tet Example: explicit bases for P − P − r Λ 1 ( T 3 ) Edge [ x i , x j ] Face [ x i , x j , x k ] Tet [ x i , x j , x k , x l ] r 1 φ ij 2 λ i φ ij , λ j φ ij λ k φ ij , λ j φ ik { λ 2 i , λ 2 j , λ i λ j } φ ij { λ i , λ j , λ k } λ k φ ij , { λ i , λ j , λ k } λ j φ ik λ k λ l φ ij , λ j λ l φ ik , λ j λ k φ il 3 P − r Λ 2 ( T 3 ) r Edge [ x i , x j ] Face [ x i , x j , x k ] Tet [ x i , x j , x k , x l ] φ ijk 1 2 λ i φ ijk , λ j φ ijk , λ k φ ijk λ l φ ijk , λ k φ ijl , λ j φ ikl { λ 2 i , λ 2 j , λ 2 k } φ ijk { λ i , λ j , λ k , λ l } λ l φ ijk 3 { λ i λ j , λ i λ k , λ j λ k } φ ijk { λ i , λ j , λ k , λ l } λ k φ ijl { λ i , λ j , λ k , λ l } λ j φ ikl 84 / 94
Finite element differential forms on cubical meshes
The tensor product construction Again there are two families (only?). One results from a tensor product construction. (DNA–Boffi–Bonizzoni) Suppose we have a finite element de Rham subcomplex V on an element S ⊂ R m : → V k + 1 → · · · V k ⊂ Λ k ( S ) d · · · → V k − and another, W , on another element T ⊂ R n : → W k + 1 → · · · d · · · → W k − The tensor-product construction produces a new complex V ∧ W , a subcomplex of the de Rham complex on S × T . 85 / 94
The tensor product construction Again there are two families (only?). One results from a tensor product construction. (DNA–Boffi–Bonizzoni) Suppose we have a finite element de Rham subcomplex V on an element S ⊂ R m : → V k + 1 → · · · V k ⊂ Λ k ( S ) d · · · → V k − and another, W , on another element T ⊂ R n : → W k + 1 → · · · d · · · → W k − The tensor-product construction produces a new complex V ∧ W , a subcomplex of the de Rham complex on S × T . � ( V ∧ W ) k = S V i ∧ π ∗ π ∗ T W j ( π S : S × T → S ) Shape fns: i + j = k ( η ∧ ρ )( π ∗ S v ∧ π ∗ T w ) := η ( v ) ρ ( w ) DOFs: 85 / 94
r Λ k family Finite element differential forms on cubes: the Q − Start with the simple 1-D degree r finite element de Rham complex, V r : d → P r Λ 0 ( I ) → P r − 1 Λ 1 ( I ) − 0 − − → 0 → u ′ ( x ) dx u ( x ) − Q − r Λ k ( I n ) := ( V r ∧ · · · ∧ V r ) k Take tensor product n times: Q r = P r ⊗ P r , P r − 1 ⊗ P r dx 1 + P r ⊗ P r − 1 dx 2 , P r − 1 ⊗ P r − 1 dx 1 ∧ dx 2 Q − 1 Λ 0 Q − 1 Λ 1 Q − 1 Λ 2 → → Raviart-Thomas ’76 → → → Nedelec ’80 86 / 94
The 2nd family of finite element differential forms on cubes The S r Λ k ( I n ) family of FEDFs: (DNA–Awanou ’12) Shape fns: For a form monomial m = x α i 1 · · · x α n dx σ 1 ∧ · · · ∧ dx σ k , define deg m = � α i , ldeg m = # { i | α i = 1 , α i � = { σ 1 , . . . , σ k } } . n Ex: If m = x 1 x 2 x 5 3 dx 1 , deg m = 7, ldeg m = 1. H r ,ℓ Λ k ( I n ) = span of monomials with deg = r , ldeg ≥ ℓ , � κ H r + ℓ − 1 ,ℓ Λ k + 1 ( I n ) , J r Λ k ( I n ) = ℓ ≥ 1 S r Λ k ( I n ) = P r Λ k ( I n ) ⊕ J r Λ k ( I n ) ⊕ d J r + 1 Λ k − 1 ( I n ) . � q ∈ P r − 2 d Λ d − k ( f ) , f ∈ ∆( I n ) u �→ DOFs: f u ∧ q , 87 / 94
Key properties For any n ≥ 1, r ≥ 1, 0 ≤ k ≤ n : Degree property: P r Λ k ( I n ) ⊂ S r Λ k ( I n ) ⊂ P r + n − k Λ k ( I n ) Inclusion property: S r Λ k ( I n ) ⊂ S r + 1 Λ k ( I n ) Trace property: For each face f of I n , tr f S r Λ k ( I n ) = S r Λ k ( f ) . Subcomplex property: d S r Λ k ( I n ) ⊂ S r − 1 Λ k + 1 ( I n ) Unisolvence: The indicated DOFs are correct in number and are unisolvent. Commuting projections: The DOFs determine commuting projections from the de Rham complex to the subcomplex d d d S r Λ 0 ( I n ) → S r − 1 Λ 1 ( I n ) → S r − n Λ n ( I n ) . − − → · · · − 88 / 94
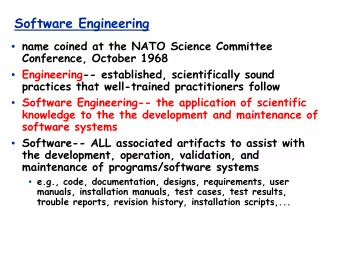
The case of 0-forms ( H 1 elements) Define sdeg m of a monomial m to be the degree ignoring variables that enter linearly: sdeg x 3 yz 2 = 5. For a polynomial p , sdeg p is the maximum over its monomials. S r ( I n ) = { p ∈ P ( I n ) | sdeg p ≤ r } DNA-Awanou ’10 2D: S r ( I 2 ) = P r ( I 2 ) + span [ x r y , xy r ] 1D: S r ( I ) = P r ( I ) , serendipity S 1 ( I 2 ) S 2 ( I 2 ) S 3 ( I 2 ) S 4 ( I 2 ) S 5 ( I 2 ) 89 / 94
Serendipity 0-forms in more dimensions Dimensions P r ( I n ) S r ( I n ) Q r ( I n ) n 1 2 3 4 5 1 2 3 4 5 1 2 3 4 5 1 2 3 4 5 6 2 3 4 5 6 2 3 4 5 6 2 3 6 10 15 21 4 8 12 17 23 4 9 16 25 36 3 4 10 20 35 56 8 20 32 50 74 8 27 64 125 216 4 5 15 35 70 126 16 48 80 136 216 16 81 256 625 1296 90 / 94
Recommend












More recommend
Explore More Topics
Stay informed with curated content and fresh updates.