Feedback Control Theory Introduction - A Tutorial from Computer - PDF document
Xiaorui Wang Outline CSE 520S Feedback Control Theory Introduction - A Tutorial from Computer Systems Perspective What is feedback control? Why feedback control? Control design methodology System modeling Performance
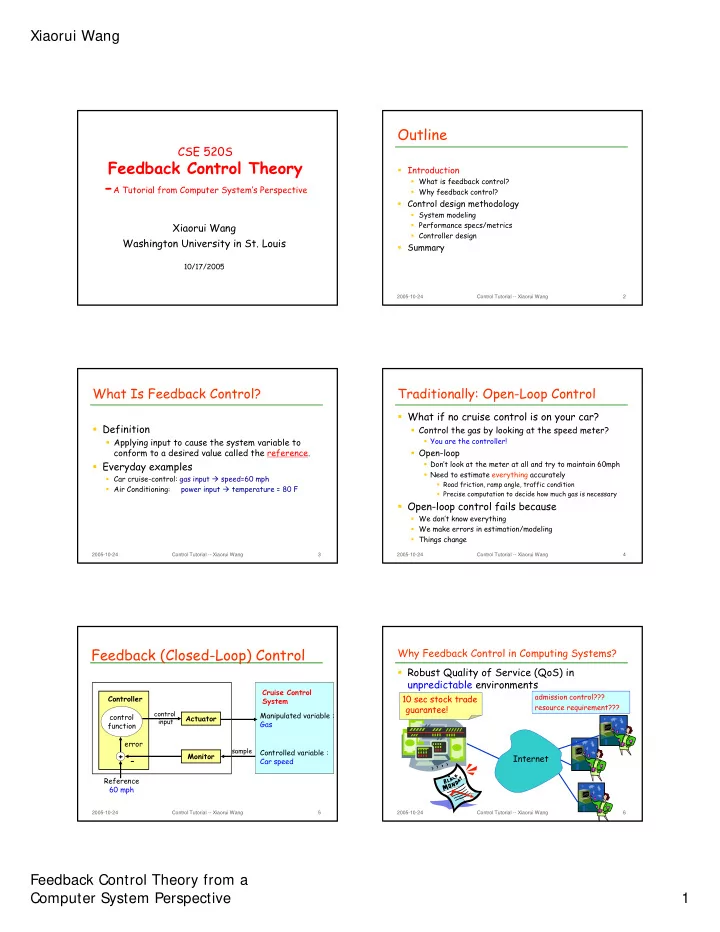
Xiaorui Wang Outline CSE 520S Feedback Control Theory � Introduction - A Tutorial from Computer System’s Perspective � What is feedback control? � Why feedback control? � Control design methodology � System modeling � Performance specs/metrics Xiaorui Wang � Controller design Washington University in St. Louis � Summary 10/17/2005 2005-10-24 Control Tutorial -- Xiaorui Wang 2 What Is Feedback Control? Traditionally: Open-Loop Control � What if no cruise control is on your car? � Definition � Control the gas by looking at the speed meter? � Applying input to cause the system variable to � You are the controller! conform to a desired value called the reference. � Open-loop � Don’t look at the meter at all and try to maintain 60mph � Everyday examples � Need to estimate everything accurately � Car cruise-control: gas input � speed=60 mph � Road friction, ramp angle, traffic condition � Air Conditioning: power input � temperature = 80 F � Precise computation to decide how much gas is necessary � Open-loop control fails because � We don’t know everything � We make errors in estimation/modeling � Things change 2005-10-24 Control Tutorial -- Xiaorui Wang 3 2005-10-24 Control Tutorial -- Xiaorui Wang 4 Feedback (Closed-Loop) Control Why Feedback Control in Computing Systems? � Robust Quality of Service (QoS) in unpredictable environments Cruise Control admission control??? 10 sec stock trade Controller System resource requirement??? guarantee! control Manipulated variable : control Actuator input Gas function error sample Controlled variable : + - Monitor Internet Car speed Reference 60 mph 2005-10-24 Control Tutorial -- Xiaorui Wang 5 2005-10-24 Control Tutorial -- Xiaorui Wang 6 Feedback Control Theory from a Computer System Perspective 1
Xiaorui Wang Heuristics Based Control??? CPU Utilization Control in Real-Time Systems � Why CPU utilization control? � Laborious design/tuning/testing iterations CPU utilization in a � Overload protection real-time server � How much do you change the task periods? � Real-time priorities > system 100% � Too little � slow convergence; Too large � system oscillation priority � Utilization ≈ 100% � Operating � How often do we see this kind of papers? Ref: system freezes 70% � Not enough confidence in face of untested workload Task 1 (30%) � Meet deadlines for periodical real-time tasks � CPU utilization < schedulable Task 2 (20%) threshold � meet all deadlines on this processor Task 3 (30%) � Control method � Reference: CPU utilization = 70% CPU utilization of each task � Handling unpredicted execution execution time time variations = Parameter K = 2000 Parameter K = 100000 Best parameter K = 8000 task period � Actuation: Task period What about 7000, 9000…? 2005-10-24 Control Tutorial -- Xiaorui Wang 7 2005-10-24 Control Tutorial -- Xiaorui Wang 8 Outline Advantages of Feedback Control Theory � A science with over 100 years of history � Has been successfully applied in all engineering fields � Introduction � Car cruise control, air conditioning and more � What is feedback control? � Why feedback control theory? � Why feedback control? � Best way to design control loops � Control design methodology � Well-established algorithms to choose control parameters � Predictable system response � System modeling � Guaranteed stability � Performance specs/metrics � Quantitative way to analyze the impact of system variation � Controller design on control performance � Summary 2005-10-24 Control Tutorial -- Xiaorui Wang 9 2005-10-24 Control Tutorial -- Xiaorui Wang 10 Control Design Methodology CPU Utilization Modeling CPU utilization in a � CPU utilization is the sum of the real-time server utilizations of all tasks 100% 1 � In the k th time period Modeling 70% Modeling System Model 3 4 u(k) u (k) u (k) u (k) Task 1 = + + T1 T2 T3 = e (k)r (k) + e (k)r (k) + e (k)r (k) Controller Control Controller Control 1 1 2 2 3 3 Task 2 Design Algorithm Design Algorithm � The differential utilization 2 model Task 3 Requirement Requirement Performance u(k) = u(k - 1) + Δ u(k - 1) Analysis Specifications CPU utilization of task i Analysis u(k - 1) e (k - 1) r (k - 1) execution time = + Δ 1 1 = task period + e (k - 1) Δ r (k - 1) + e (k - 1) Δ r (k - 1) 2 2 3 3 = execution time × task rate = e i r i 2005-10-24 Control Tutorial -- Xiaorui Wang 11 2005-10-24 Control Tutorial -- Xiaorui Wang 12 Feedback Control Theory from a Computer System Perspective 2
Xiaorui Wang Possible Variation in Execution Times Z-Transforms and Transfer Function � Real task execution times differ from their � Why Z-transforms? estimations in a ratio G: e (k) = Ge � Easier control analysis i i � Running on a different processor � Stability, steady-state error, settling time � Execution times are influenced by external inputs � Simpler manipulations � Time series (i.e. k, k-1, k-2) -> multiplication u(k) = u(k - 1) + e (k - 1) Δ r (k - 1) + e (k - 1) Δ r (k - 1) + e (k - 1) Δ r (k - 1) � How to transform to Z-domain 1 1 2 2 3 3 Assuming all execution times vary uniformly System model: u(k) = u(k - 1) + Gd(k - 1) u(k) u(k - 1) G(e r (k - 1) e r (k - 1) e r (k - 1)) = + Δ + Δ + Δ Z-transform u(k) → U(z); u(k - 1) → z -1 U(z); d(k - 1) → z -1 D(z) 1 1 2 2 3 3 U(z) z -1 U(z) z -1 GD(z) = + d(k - 1) U(z) = G Transfer Transfer function describes how the input u(k) u(k - 1) Gd(k - 1) System model: = + function: D(z) z - 1 D(z) is transformed into the output U(z) 2005-10-24 Control Tutorial -- Xiaorui Wang 13 2005-10-24 Control Tutorial -- Xiaorui Wang 14 Open Loop Block Diagram Control Design Methodology � A pictorial tool to represent a system based on transfer functions and signal flows 1 Modeling System Model U(z) = G Modeling 3 4 Transfer function: D(z) z - 1 Controller Control Controller Control Design Algorithm Design Algorithm D(z) U(z) G/(z-1) Requirement Requirement Performance Analysis Specifications Analysis input system output 2 2005-10-24 Control Tutorial -- Xiaorui Wang 15 2005-10-24 Control Tutorial -- Xiaorui Wang 16 Design Goals Performance Specs Performance Specifications Steady-State Error Unstable Controlled system: Steady state error of a CPU-utilization control system variable Overshoot U(t) Steady state error ±ε % Reference U s e ss = -20% Transient State Steady State Time Settling time 2005-10-24 Control Tutorial -- Xiaorui Wang 17 2005-10-24 Control Tutorial -- Xiaorui Wang 18 Feedback Control Theory from a Computer System Perspective 3
Xiaorui Wang Example: Control & Response in an Controller Design Requirements Email Server (IBM) � Stability Response � Zero steady state error (queue length) � Short settling time Good Bad � Robust to variations Control (MaxUsers) Slow Useless 2005-10-24 Control Tutorial -- Xiaorui Wang 19 2005-10-24 Control Tutorial -- Xiaorui Wang 20 Close the Loop – Closed Loop Diagram Control Design Methodology � Open loop diagram 1 U(z) = G Transfer D(z) G/(z-1) U(z) D(z) z - 1 function: Modeling System Model Modeling 3 4 input system output � Closed loop diagram Controller Control Controller Control Design Algorithm Design Algorithm 2 U s -U(z) D(z) Requirement Requirement + U(z) U s (z) C(z) G/(z-1) Performance _ Analysis Specifications Analysis 2005-10-24 Control Tutorial -- Xiaorui Wang 21 2005-10-24 Control Tutorial -- Xiaorui Wang 22 Closed-Loop Transfer Function Controller Design - P ID Control Standard equation � Proportional-Integral-Derivative (PID) Control � U(z) C(z)S(z) G = ; where S(z) = U (z) 1 C(z)S(z) z 1 + − • Proportional Control = − = ⇔ = s d ( k ) K ( U u ( k )) Ke ( k ) C ( z ) K s (Look at now) Deriving from the block diagram � Kz • Integral control = − + ⇔ = d ( k ) d ( k 1 ) Ke ( k ) C ( z ) G Closed-loop − (U (z) - U(z))C(z) = U(z) z 1 (Look at the past) s z - 1 − transfer function: K ( z 1 ) • Derivative control = − − ⇔ = d ( k ) K ( e ( k ) e ( k 1 )) C ( z ) z (Look at the future; predict) U(z) GC(z) GC(z)U s (z) = (z - 1)U(z) + GC(z)U(z) = U (z) z - (1 - GC(z)) s • Combination of P, I, D controller: PI, PD, PID controllers U s -U(z) D(z) U s -U(z) D(z) U s (z) + U(z) C(z) G/(z-1) U s (z) + U(z) C(z) G/(z-1) _ _ 2005-10-24 Control Tutorial -- Xiaorui Wang 23 2005-10-24 Control Tutorial -- Xiaorui Wang 24 Feedback Control Theory from a Computer System Perspective 4
Recommend









More recommend
Explore More Topics
Stay informed with curated content and fresh updates.