
Exploiting symmetry in observer design for flying robots Jochen - PowerPoint PPT Presentation
Observer theory Kinematic systems with symmetry Motivating examples from robotics and computer vision Observer design for kinematic systems with symmetry Exploiting symmetry in observer design for flying robots Jochen Trumpf ANU July 2018
Observer theory Kinematic systems with symmetry Motivating examples from robotics and computer vision Observer design for kinematic systems with symmetry Exploiting symmetry in observer design for flying robots Jochen Trumpf ANU July 2018 J. Trumpf Exploiting symmetry
Observer theory Kinematic systems with symmetry Motivating examples from robotics and computer vision Observer design for kinematic systems with symmetry Outline Observer theory 1 Kinematic systems with symmetry 2 Motivating examples from robotics and computer vision 3 Observer design for kinematic systems with symmetry 4 J. Trumpf Exploiting symmetry
Observer theory Kinematic systems with symmetry Motivating examples from robotics and computer vision Observer design for kinematic systems with symmetry The observation problem Given a set of variables (signals) whose interaction is described by a known dynamical system and given measurements of some of the variables, can you provide good estimates of (other) variables in the system? How? w 2 =? System w 1 J. Trumpf Exploiting symmetry
Observer theory Kinematic systems with symmetry Motivating examples from robotics and computer vision Observer design for kinematic systems with symmetry The observation problem Given a set of variables (signals) whose interaction is described by a known dynamical system and given measurements of some of the variables, can you provide good estimates of (other) variables in the system? How? w 2 =? System w 1 w 2 ˆ Can you do it with an observer ? Observer Observer = system interconnected with the observed system Estimate = value of variable in the observer J. Trumpf Exploiting symmetry
Observer theory Kinematic systems with symmetry Motivating examples from robotics and computer vision Observer design for kinematic systems with symmetry Ingredients for a theory of observers - Model class for the observed system (incl. measurement model) - What makes an estimate a good estimate? - Is the problem solvable ( observability )? - Model class for candidate observers - Is the problem still solvable ( existence )? - How do you recognize a solution ( characterization )? - How do you build an observer ( construction/design )? - Describe the set of all solutions ( parametrization ). - Find a “perfect” estimator ( optimization for secondary criterion) J. Trumpf Exploiting symmetry
Observer theory Kinematic systems with symmetry Motivating examples from robotics and computer vision Observer design for kinematic systems with symmetry Symmetry 0 ◦ J. Trumpf Exploiting symmetry
Observer theory Kinematic systems with symmetry Motivating examples from robotics and computer vision Observer design for kinematic systems with symmetry Symmetry 90 ◦ J. Trumpf Exploiting symmetry
Observer theory Kinematic systems with symmetry Motivating examples from robotics and computer vision Observer design for kinematic systems with symmetry Symmetry 270 ◦ 90 ◦ + 180 ◦ − 90 ◦ complete symmetry Z 4 J. Trumpf Exploiting symmetry
Observer theory Kinematic systems with symmetry Motivating examples from robotics and computer vision Observer design for kinematic systems with symmetry Symmetry G id 0 ◦ X x complete symmetry Z 4 J. Trumpf Exploiting symmetry
Observer theory Kinematic systems with symmetry Motivating examples from robotics and computer vision Observer design for kinematic systems with symmetry Symmetry G g 90 ◦ X α ( g, x ) x complete symmetry Z 4 J. Trumpf Exploiting symmetry
Observer theory Kinematic systems with symmetry Motivating examples from robotics and computer vision Observer design for kinematic systems with symmetry Symmetry G g 270 ◦ 90 ◦ + 180 ◦ − 90 ◦ X α ( g, x ) x partial symmetry S 1 complete symmetry Z 4 complete symmetry SO (3) J. Trumpf Exploiting symmetry
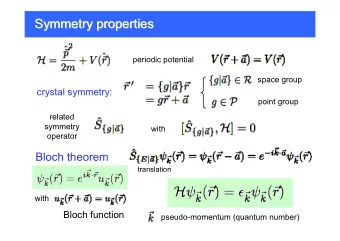
Observer theory Kinematic systems with symmetry Motivating examples from robotics and computer vision Observer design for kinematic systems with symmetry Symmetry Lie group G differentiable manifold X right action α : G × X → X , x �→ α ( g , x ) α ( id , x ) = x and α ( g , α ( h , x )) = α ( hg , x ) α transitive ⇔ X is a G -homogeneous space ⇔ G is a complete symmetry for X J. Trumpf Exploiting symmetry
Observer theory Kinematic systems with symmetry Motivating examples from robotics and computer vision Observer design for kinematic systems with symmetry Kinematic systems Kinematic systems are of the form x = f ( x , v ) , ˙ y i = h i ( x ) , i = 1 , . . . , p where x ( t ) ∈ X , a differentiable state manifold, v ( t ) ∈ V , an input vector space, and f ( x , . ): V → T x X linear . Also, each y i ( t ) ∈ Y i , a differentiable output manifold. One way to think about kinematic systems is that they are defined by a linearly parametrized family { f ( ., v ) } v ∈ V of vector fields on X . J. Trumpf Exploiting symmetry
Observer theory Kinematic systems with symmetry Motivating examples from robotics and computer vision Observer design for kinematic systems with symmetry Kinematic systems with complete symmetry x = f ( x , v ) , ˙ y i = h i ( x ) , i = 1 , . . . , p with right Lie group actions V X φ : G × X → X , ψ : G × V → V , ψ g φ g ρ i : G × Y i → Y i such that d φ g ( x )[ f ( x , v )] = f ( φ ( g , x ) , ψ ( g , v )) , ρ i ( g , h i ( x )) = h i ( φ ( g , x )) J. Trumpf Exploiting symmetry
Observer theory Kinematic systems with symmetry Motivating examples from robotics and computer vision Observer design for kinematic systems with symmetry A toy example y = x X = S 2 , V = R 3 , Y = S 2 , G = SO (3) φ ( R , x ) = R ⊤ x ψ ( R , Ω) = R ⊤ Ω ρ ( R , y ) = R ⊤ y J. Trumpf Exploiting symmetry
Observer theory Kinematic systems with symmetry Motivating examples from robotics and computer vision Observer design for kinematic systems with symmetry Homographies Transformation of an image of a planar scene η ⊤ H = R + ξ ˆ d p i ≃ H − 1 ˚ p i J. Trumpf Exploiting symmetry
Observer theory Kinematic systems with symmetry Motivating examples from robotics and computer vision Observer design for kinematic systems with symmetry Application of homographies to image stabilization ˙ H = H (Ω × + Γ) H − 1 ˚ p i p i = � H − 1 ˚ p i � Ω is the angular velocity, Γ can be estimated concurrently with H , p i can be obtained feature point correspondences in video frames X = SL (3), V = sl (3), Y i = S 2 , G = SL (3) φ ( Q , H ) = HQ ψ ( Q , u ) = Q − 1 uQ Q − 1 p i ρ i ( Q , p i ) = � Q − 1 p i � J. Trumpf Exploiting symmetry
Observer theory Kinematic systems with symmetry Motivating examples from robotics and computer vision Observer design for kinematic systems with symmetry Robotics problems with symmetry An incomplete list of robotics problems with complete symmetry: - Attitude estimation SO (3) - Pose estimation SE (3) - Second order kinematics TS ?(3) - Homography estimation SL (3) - Simultaneous Localization and Mapping (SLAM) - Unicycle SE (2) - Nonholonomic car with trailers These generic problems come in several versions depending on the types of available measurements. J. Trumpf Exploiting symmetry
Observer theory Kinematic systems with symmetry Motivating examples from robotics and computer vision Observer design for kinematic systems with symmetry General approach - Lift the system kinematics to the symmetry group - Design an observer for the resulting invariant system - Project the observer state to obtain a system state estimate Why? - Observer design for invariant systems on Lie groups is very well studied (Bonnabel/Martin/Rouchon TAC 2009, Lageman/T./Mahony TAC 2010) - It is often possible to obtain autonomous error dynamics in (global) gradient flow form - The system theory of invariant systems on Lie groups is as close to LTI system theory as one can get in the nonlinear regime J. Trumpf Exploiting symmetry
Observer theory Kinematic systems with symmetry Motivating examples from robotics and computer vision Observer design for kinematic systems with symmetry Lifted kinematics Fix a reference point ˚ x ∈ X and choose a velocity lift x : V → g such that F ˚ x ( id )[ F ˚ x ( v )] = f (˚ x , v ) d φ ˚ Define lifted kinematics x ( ψ ( g − 1 , v ))] , g = F ( g , v ) := d R g ( id )[ F ˚ ˙ y i = ρ i ( g , ˚ y i ) , where ˚ y i = h i (˚ x ), then d φ ˚ x ( X )[ F ( g , v )] = f ( x , v ) , where x = φ ( g , ˚ x ) The lifted kinematics on G project to the system kinematics on X ! J. Trumpf Exploiting symmetry
Observer theory Kinematic systems with symmetry Motivating examples from robotics and computer vision Observer design for kinematic systems with symmetry Lifted kinematics G g id Symmetry R , ψ , ρ i g x ( ψ ( g − 1 , v )) F ˚ F ˚ V X φ ˚ x x ψ g φ g v x Symmetry φ , ψ , ρ i x ˚ J. Trumpf Exploiting symmetry
Observer theory Kinematic systems with symmetry Motivating examples from robotics and computer vision Observer design for kinematic systems with symmetry Lifted kinematics Toy example � � − Ω 3 0 Ω 2 F e 3 (Ω) = = Ω × Ω 3 0 − Ω 1 − Ω 2 Ω 1 0 F ( R , Ω) = ( R Ω) × R = ( R Ω × R ⊤ ) R = R Ω × ˙ ˙ R = R Ω × rigid body! H = Hu homography! J. Trumpf Exploiting symmetry
Recommend







![SO(3) family symmetry and axions Mario Reig Phys. Rev. D 98, 095008; [arXiv: 1805.08048] MR ,](https://c.sambuz.com/1007179/so-3-family-symmetry-and-axions-s.webp)
More recommend
Explore More Topics
Stay informed with curated content and fresh updates.