
Explicit vs Implicit CommunicaGon in Control Anant Sahai - PowerPoint PPT Presentation
Explicit vs Implicit CommunicaGon in Control Anant Sahai UC Berkeley Joint with Se Yong Park and Pulkit Grover Thanks to NSF for funding this
Explicit ¡vs ¡Implicit ¡ CommunicaGon ¡in ¡Control ¡ Anant ¡Sahai ¡ UC ¡Berkeley ¡ ¡ Joint ¡with ¡ Se ¡Yong ¡Park ¡ and ¡Pulkit ¡Grover ¡ Thanks ¡to ¡NSF ¡for ¡funding ¡this ¡ (and ¡a ¡Samsung ¡Scholarship) ¡ UC ¡Berkeley ¡
Two ¡Basic ¡Problems ¡ Plant ¡ Plant ¡ Actuator ¡ Observer ¡ Controller ¡ Controller ¡ CommunicaGon ¡ Channel ¡ Controller ¡ Controller ¡ UC ¡Berkeley ¡
Two ¡Basic ¡Problems ¡ Plant ¡ Plant ¡ InformaGon ¡ Flows? ¡ Actuator ¡ Observer ¡ InformaGon ¡ Controller ¡ Controller ¡ Flow ¡ CommunicaGon ¡ Channel ¡ Controller ¡ Controller ¡ -‑ Explicit ¡InformaGon ¡Flow ¡ -‑ Implicit ¡InformaGon ¡Flow ¡ -‑ Plant ¡as ¡Source ¡ -‑ Plant ¡as ¡Channel??? ¡ UC ¡Berkeley ¡
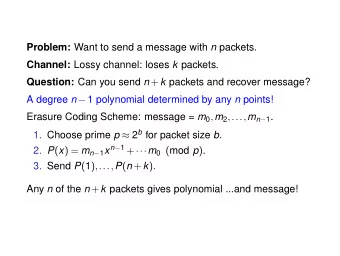
Outline: ¡three ¡short ¡vigneQes ¡ ¡ • Control ¡over ¡explicit ¡channels: ¡ – Real ¡Erasure ¡Channel ¡(packet ¡drops) ¡ • Implicit ¡Comm ¡in ¡Decentralized ¡control: ¡ – LTI ¡(linear ¡Gme-‑invariant) ¡controllers ¡ – Nonlinear ¡controllers ¡ UC ¡Berkeley ¡
DeterminisGc ¡perspecGve ¡on ¡the ¡data ¡rate ¡theorem ¡ • At ¡each ¡Gme ¡step, ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡bits ¡ ¡ ¡ UC ¡Berkeley ¡
Control ¡over ¡noisy ¡channels ¡ Observer ¡ Noisy ¡Channel ¡ Actuator ¡ Feedback ¡ Theorem ¡[S. ¡and ¡MiQer, ¡2006] ¡ \ ¡ • Delay ¡error ¡exponent ¡is ¡important ¡ UC ¡Berkeley ¡
Restrict ¡to ¡linear: ¡observaGon ¡over ¡erasure ¡channels ¡ Observer ¡ Actuator ¡ PLANT ¡ SENSOR ¡ EsGmator ¡ UC ¡Berkeley ¡
IntermiQent ¡Kalman ¡Filtering ¡ Theorem ¡[Sinopoli ¡ et ¡al. , ¡2004] ¡ \ ¡ • Q: ¡How ¡can ¡we ¡characterize ¡ ¡ ¡ ¡ ¡ ¡ ¡? ¡ – For ¡scalar ¡system, ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡by ¡the ¡noisy ¡channel ¡result ¡ ¡ UC ¡Berkeley ¡ ¡
IntermiQent ¡Kalman ¡Filtering: ¡Vector ¡Systems ¡ ¡[Mo ¡and ¡Sinopoli, ¡2008] ¡ InformaGon ¡is ¡a ¡two-‑dimensional ¡vector ¡space. ¡ We ¡need ¡both ¡even ¡and ¡odd ¡Gme ¡observaGons ¡to ¡decode ¡ Delay ¡Gll ¡we ¡get ¡both ¡ kinds ¡of ¡observaGons ¡becomes ¡larger ¡ CriGcal ¡Erasure ¡Probability ¡decreases ¡to ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡from ¡ ¡ UC ¡Berkeley ¡
IntermiQent ¡Kalman ¡Filtering: ¡need ¡enough ¡rank ¡ IntermiQent ¡Kalman ¡Filtering ¡ P e =1 ¡ P e =0 ¡ Stability ¡ Observability ¡ Sinopoli ¡ et ¡al. ¡[2004] ¡ Park ¡and ¡S. ¡[2011] ¡ Lyapunov ¡Stability ¡: ¡ IntermiQent ¡Observability ¡: ¡ Bound ¡on ¡ ¡ Exact ¡CharacterizaGon ¡of ¡ Theorem ¡[Park ¡and ¡S., ¡2011] ¡ \ ¡ where ¡… ¡ UC ¡Berkeley ¡
Nonuniform ¡sampling ¡= ¡each ¡observaGon ¡adds ¡rank ¡ Uniform ¡ Nonuniform ¡ Sampling ¡ Sampling ¡ UC ¡Berkeley ¡ Gming ¡jiQer ¡
Summary ¡so ¡far ¡ • Noiseless ¡Channels ¡ – Source ¡(and ¡desGnaGon??) ¡ of ¡informaGon ¡are ¡states. ¡ Plant ¡ • Noisy ¡Channels ¡ Actuator ¡ Observer ¡ – Delay ¡is ¡also ¡important. ¡ InformaGon ¡ • Real ¡Erasure ¡Channels ¡ Flow ¡ CommunicaGon ¡ – With ¡linear ¡controllers, ¡ Channel ¡ informaGon ¡should ¡be ¡ measured ¡in ¡dimensions. ¡ UC ¡Berkeley ¡
Outline: ¡three ¡short ¡vigneQes ¡ ¡ • Control ¡over ¡explicit ¡channels: ¡ – Real ¡Erasure ¡Channel ¡(packet ¡drops) ¡ • Implicit ¡Comm ¡in ¡Decentralized ¡control: ¡ – LTI ¡(linear ¡Gme-‑invariant) ¡controllers ¡ – Nonlinear ¡controllers ¡ UC ¡Berkeley ¡
Signaling ¡by ¡acGons ¡= ¡Implicit ¡CommunicaGon ¡ Plant ¡ Informa/on ¡ Flows?? ¡ Controller ¡ Controller ¡ Controller ¡ Controller ¡ UC ¡Berkeley ¡
The ¡moral ¡of ¡linear ¡network ¡coding ¡ a, ¡b ¡ Two-‑dimensional ¡Source ¡ S ¡ a ¡ b ¡ R 1 ¡ R 2 ¡ a ¡ b ¡ R 3 ¡ a ¡ b ¡ a+b ¡ R 4 ¡ a+b ¡ a+b ¡ D 1 ¡ D 2 ¡ Two-‑dimensional ¡ a, ¡a+b ¡ a+b, ¡b ¡ Received ¡ a, ¡b ¡ a, ¡b ¡ Decoded ¡ • InformaGon ¡ should ¡be ¡measured ¡in ¡dimensions. ¡ UC ¡Berkeley ¡
Network ¡coding ¡and ¡decentralized ¡linear ¡systems? ¡ S ¡ a ¡ b ¡ R 1 ¡ R 2 ¡ a ¡ b ¡ ? ¡ R 3 ¡ a ¡ b ¡ a+b ¡ R 4 ¡ a+b ¡ a+b ¡ D 1 ¡ D 2 ¡ a, ¡b ¡ a, ¡b ¡ UC ¡Berkeley ¡
LTI ¡Stabilizability ¡of ¡decentralized ¡linear ¡systems ¡ UC ¡Berkeley ¡
Conceptual ¡Example ¡ Plant ¡ Controller ¡1 ¡ Controller ¡2 ¡ K 1 ¡ K 2 ¡ • State-‑space ¡representaGon ¡of ¡Decentralized ¡ Control ¡System ¡ UC ¡Berkeley ¡
Conceptual ¡Example ¡ Plant ¡ Controller ¡1 ¡ Controller ¡2 ¡ K 1 ¡ K 2 ¡ • State-‑space ¡representaGon ¡of ¡Decentralized ¡ Control ¡System ¡ UC ¡Berkeley ¡
Conceptual ¡Example ¡ Plant ¡ Controller ¡1 ¡ Controller ¡2 ¡ K 1 ¡ K 2 ¡ • State-‑space ¡representaGon ¡of ¡Decentralized ¡ Control ¡System ¡ UC ¡Berkeley ¡
Conceptual ¡Example ¡ Plant ¡ Controller ¡1 ¡ Controller ¡2 ¡ K 1 ¡ K 2 ¡ • State-‑space ¡representaGon ¡of ¡Decentralized ¡ Control ¡System ¡ UC ¡Berkeley ¡
Conceptual ¡Example ¡ Plant ¡ Controller ¡1 ¡ Controller ¡2 ¡ K 1 ¡ K 2 ¡ • LTI ¡Network ¡representaGon ¡of ¡communicaGon ¡ u 1 ¡ y 2 ¡ u 2 ¡ y 1 ¡ x 1 ¡ x 1 ¡ H’ ¡ H’’ ¡ K 1 ¡ K 2 ¡ H x 2 ¡ x 2 ¡ UC ¡Berkeley ¡
Conceptual ¡Example ¡ Plant ¡ u 1 ¡ y 2 ¡ u 2 ¡ y 1 ¡ x 1 ¡ x 1 ¡ H’ ¡ H’’ ¡ K 1 ¡ K 2 ¡ H x 2 ¡ x 2 ¡ Controller ¡ Controller ¡ 1 ¡ 2 ¡ Decentralized ¡Linear ¡Systems ¡ Relay ¡Communica/on ¡Networks ¡ Unstable ¡States ¡associated ¡with ¡eigenvalue ¡2 ¡ Source ¡ Unstable ¡States ¡associated ¡with ¡eigenvalue ¡2 ¡ DesGnaGon ¡ Controllers ¡ Relays ¡ Remaining ¡States ¡and ¡B i , ¡C i ¡ Channels ¡ UC ¡Berkeley ¡
Conceptual ¡Example ¡ Plant ¡ u 1 ¡ y 2 ¡ u 2 ¡ y 1 ¡ x 1 ¡ x 1 ¡ H’ ¡ H’’ ¡ K 1 ¡ K 2 ¡ H x 2 ¡ x 2 ¡ Controller ¡ Controller ¡ 1 ¡ 2 ¡ Decentralized ¡Linear ¡Systems ¡ Relay ¡Communica/on ¡Networks ¡ Unstable ¡States ¡associated ¡with ¡eigenvalue ¡2 ¡ Source ¡ Unstable ¡States ¡associated ¡with ¡eigenvalue ¡2 ¡ DesGnaGon ¡ Controllers ¡ Relays ¡ Remaining ¡States ¡and ¡B i , ¡C i ¡ Channels ¡ Unstable ¡Subspace ¡associated ¡with ¡eigenvalue ¡2 ¡ Message ¡ Dimension ¡of ¡unstable ¡subspace ¡ ¡ Rate ¡of ¡Message ¡ associated ¡with ¡eigenvalue ¡2 ¡ Stabilizability ¡(Enough ¡implicit ¡communicaGon ¡ Capacity ¡ for ¡unstable ¡subspace) ¡ UC ¡Berkeley ¡
Conceptual ¡Example ¡ Plant ¡ u 1 ¡ y 2 ¡ u 2 ¡ y 1 ¡ x 1 ¡ x 1 ¡ H’ ¡ H’’ ¡ K 1 ¡ K 2 ¡ H x 2 ¡ x 2 ¡ Controller ¡ Controller ¡ 1 ¡ 2 ¡ Decentralized ¡Linear ¡Systems ¡ Relay ¡Communica/on ¡Networks ¡ Unstable ¡States ¡associated ¡with ¡eigenvalue ¡2 ¡ Source ¡ Unstable ¡States ¡associated ¡with ¡eigenvalue ¡2 ¡ DesGnaGon ¡ Controllers ¡ Relays ¡ Remaining ¡States ¡and ¡B i , ¡C i ¡ Channels ¡ Stabilizability ¡(Enough ¡implicit ¡communicaGon ¡ Capacity ¡ for ¡unstable ¡subspace) ¡ • LTI-‑Stabilizable ¡since ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡(dimension ¡of ¡x 1 , ¡x 2 ) ¡ ¡≤ ¡ ¡(capacity ¡of ¡network) ¡ ¡ UC ¡Berkeley ¡
Recommend







More recommend
Explore More Topics
Stay informed with curated content and fresh updates.