EDA421/DIT171 - Parallel and Distributed Real-Time Systems, - PDF document
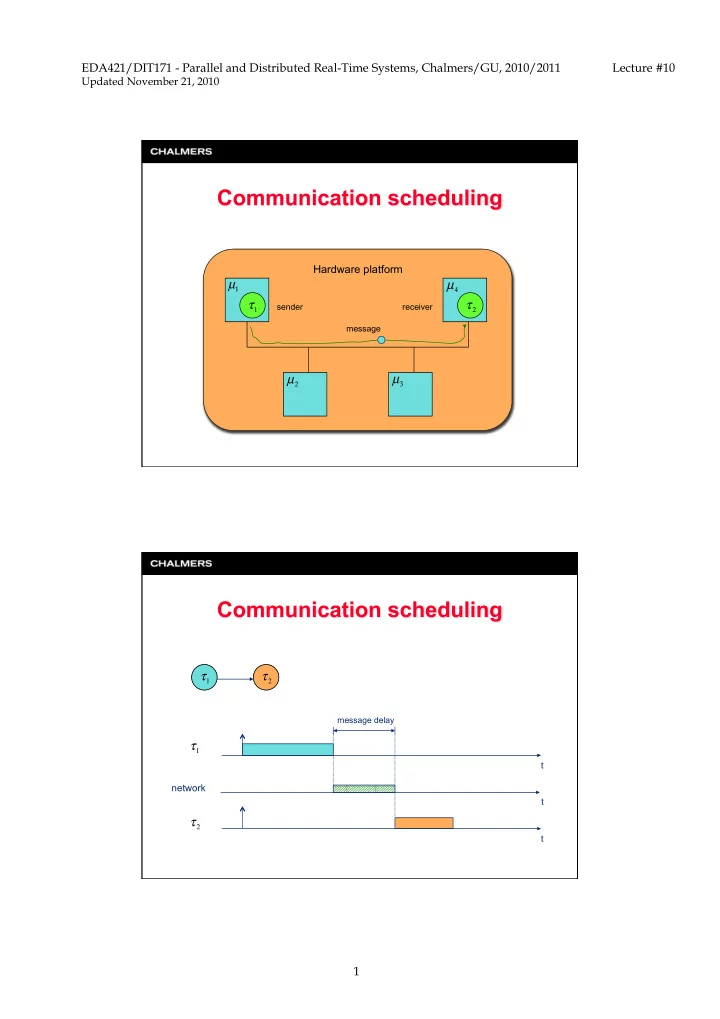
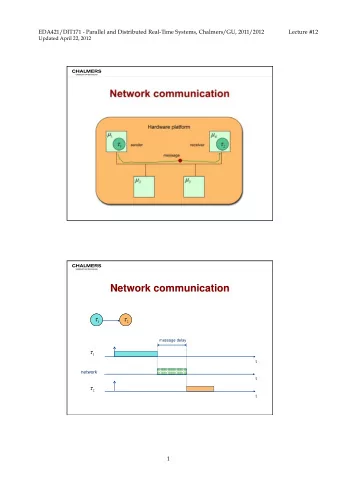
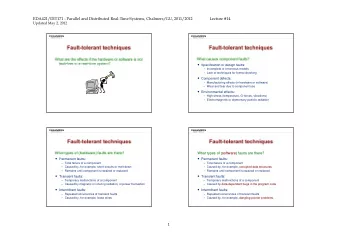
EDA421/DIT171 - Parallel and Distributed Real-Time Systems, Chalmers/GU, 2010/2011 Lecture #10 Updated November 21, 2010 Hardware platform sender receiver message T 1 T 2 message delay t network t t 1 EDA421/DIT171 -
EDA421/DIT171 - Parallel and Distributed Real-Time Systems, Chalmers/GU, 2010/2011 Lecture #10 Updated November 21, 2010 Hardware platform sender receiver message T 1 T 2 message delay t network t t 1
EDA421/DIT171 - Parallel and Distributed Real-Time Systems, Chalmers/GU, 2010/2011 Lecture #10 Updated November 21, 2010 2
EDA421/DIT171 - Parallel and Distributed Real-Time Systems, Chalmers/GU, 2010/2011 Lecture #10 Updated November 21, 2010 – Message length (bits) – Data rate (bits/s) and – Communication distance (m) – Signal propagation velocity (m/s) 3
EDA421/DIT171 - Parallel and Distributed Real-Time Systems, Chalmers/GU, 2010/2011 Lecture #10 Updated November 21, 2010 4
EDA421/DIT171 - Parallel and Distributed Real-Time Systems, Chalmers/GU, 2010/2011 Lecture #10 Updated November 21, 2010 5
EDA421/DIT171 - Parallel and Distributed Real-Time Systems, Chalmers/GU, 2010/2011 Lecture #10 Updated November 21, 2010 queuing delay transmission delay T 1 T 2 notification delay t network t t release jitter 6
EDA421/DIT171 - Parallel and Distributed Real-Time Systems, Chalmers/GU, 2010/2011 Lecture #10 Updated November 21, 2010 T 1 T 2 dedicated time slot t network t t 7
EDA421/DIT171 - Parallel and Distributed Real-Time Systems, Chalmers/GU, 2010/2011 Lecture #10 Updated November 21, 2010 8
EDA421/DIT171 - Parallel and Distributed Real-Time Systems, Chalmers/GU, 2010/2011 Lecture #10 Updated November 21, 2010 – Based on the CAN protocol Node A – Bus topology – Media: twisted pair CPU/ – 1Mbit/s mem/CC S S S Node 3 Node 1 Node 6 Node 7 A second controller is required to implement the Node 5 redundant bus Node 4 Node 2 ”Exclusive” – guaranteed service ”Arbitration” – guaranteed service (high ID), best effort (low ID) ”Reserved” – for future expansion... Transmission Columns Basic cycle 0 Basic cycle 1 Basic cycle 2 Basic cycle 3 t Time is global and measured in network time units (NTU’s) 9
EDA421/DIT171 - Parallel and Distributed Real-Time Systems, Chalmers/GU, 2010/2011 Lecture #10 Updated November 21, 2010 – Double channels (one redundant). Bus topology or ”star” (optical) – Media: twisted pair, fibre – 10 Mbit/s for each channel Node Node 3 Node Node 1 A 6 CPU/ mem/CC Node Node Node 5 4 2 S S S Node Node 1 4 A Node Node 2 5 B A network is built on either Node Node 3 twin buses or twin stars. 6 All communication is statically scheduled Guaranteed service ”TDMA-round” ”message slots” t Non-periodic messages have to be fitted into static slots by the application 10
EDA421/DIT171 - Parallel and Distributed Real-Time Systems, Chalmers/GU, 2010/2011 Lecture #10 Updated November 21, 2010 – Double channels, bus or star (even mixed). – Media: twisted pair, fibre Node – 10 Mbit/s for each channel A CPU/ mem/CC Node 3 S S Node 1 Node 6 Node 7 S B A Node 5 Node Redundant channel can be 4 Node 2 used for an alternative schedule ”Static segment” (compare w/ TTCAN ”Exclusive”) – guaranteed service ”Dynamic segment” (compare w/ TTCAN ”Arbitration”) – guaranteed service (high ID), ”best effort” (low ID) 63 62 Network Idle Time Symbol window Guaranteed periodical Guaranteed ”Best-effort” periodical/ aperiodical aperiodical 3 2 1 0 Static segment Dynamic segment (m slots) (n mini-slots) Max 64 nodes on a Flexray network. 11
EDA421/DIT171 - Parallel and Distributed Real-Time Systems, Chalmers/GU, 2010/2011 Lecture #10 Updated November 21, 2010 12
EDA421/DIT171 - Parallel and Distributed Real-Time Systems, Chalmers/GU, 2010/2011 Lecture #10 Updated November 21, 2010 A necessary feasibility test: A sufficient feasibility test: constantly rotating token 13
EDA421/DIT171 - Parallel and Distributed Real-Time Systems, Chalmers/GU, 2010/2011 Lecture #10 Updated November 21, 2010 PPP: priority field P P P P P P T M R R R R R R RRR: reservation field SD AC AC ED Token format SD AC AC ED addresses packet data error control ED FS Message frame format 1. Each node examines RRR of a busy token as it passes and inserts the priority of its pending message only if it is greater than the priority currently in RRR. 2. A node does not grab a “free” token unless the priority of its pending message is at least as high as the priority in PPP. Then the token status is changed to “busy”. 3. A transmitting node appends its pending message after the “busy” token and sets RRR appropriately. 4. A transmitting node waits until it receives back the “busy” token before releasing the next “free” token with PPP set to the (possibly) updated RRR. 14
EDA421/DIT171 - Parallel and Distributed Real-Time Systems, Chalmers/GU, 2010/2011 Lecture #10 Updated November 21, 2010 A sufficient and necessary feasibility test: – Capture token when node has highest-priority message pending – Transmit message – Transmit subsequent free token 15
EDA421/DIT171 - Parallel and Distributed Real-Time Systems, Chalmers/GU, 2010/2011 Lecture #10 Updated November 21, 2010 collision-detect broadcast bus 16
EDA421/DIT171 - Parallel and Distributed Real-Time Systems, Chalmers/GU, 2010/2011 Lecture #10 Updated November 21, 2010 SOF 11-bit identifier control 0 - 8 bytes of message data error control Ack EOF 17
EDA421/DIT171 - Parallel and Distributed Real-Time Systems, Chalmers/GU, 2010/2011 Lecture #10 Updated November 21, 2010 1. Each node with a pending message waits until bus is idle. 2. The node begins transmitting the highest-priority message pending on the node. Identifier is transmitted first, in the order of most-significant bit to least-significant bit. 3. If a node transmits a recessive bit (’1’) but sees a dominant bit (’0’) on the bus, then it stops transmitting since it is not transmitting the highest-priority message in the system. 4. The node that transmits the last bit of its identifier without detecting a bus inconsistency has the highest priority and can start transmitting the body of the message. 18
Recommend












More recommend
Explore More Topics
Stay informed with curated content and fresh updates.