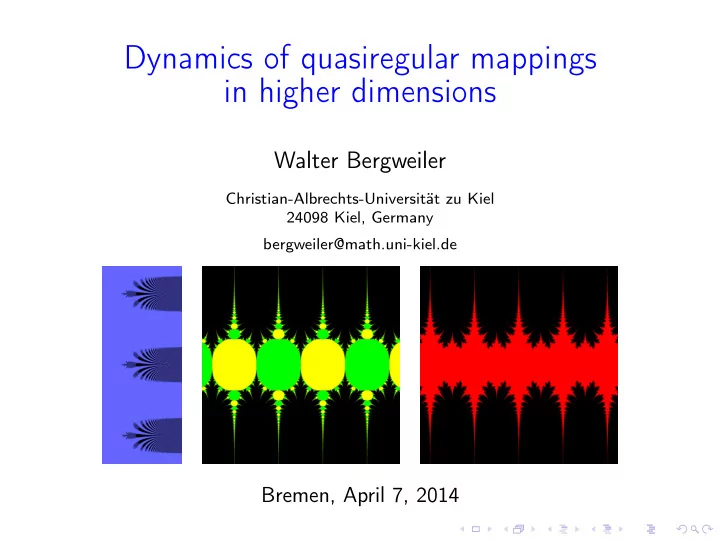
Trigonometric functions T λ,µ ( z ) = sin ( λ z + µ ) 5 Devaney-Tangerman 1984: 0 < λ < 1 , µ = 0 ⇒ J ( T λ,µ ) is an uncountable union of pairwise disjoint hairs. McMullen 1987: λ � = 0 ⇒ area J ( T λ,µ ) > 0. 0 < λ < 1 , µ = 0 , X = set of endpoints of the hairs
Trigonometric functions T λ,µ ( z ) = sin ( λ z + µ ) 5 Devaney-Tangerman 1984: 0 < λ < 1 , µ = 0 ⇒ J ( T λ,µ ) is an uncountable union of pairwise disjoint hairs. McMullen 1987: λ � = 0 ⇒ area J ( T λ,µ ) > 0. 0 < λ < 1 , µ = 0 , X = set of endpoints of the hairs Karpińska 1999: area X > 0 (and dim ( J ( T λ,µ ) \ X ) = 1 ) .
Trigonometric functions T λ,µ ( z ) = sin ( λ z + µ ) 5 Devaney-Tangerman 1984: 0 < λ < 1 , µ = 0 ⇒ J ( T λ,µ ) is an uncountable union of pairwise disjoint hairs. McMullen 1987: λ � = 0 ⇒ area J ( T λ,µ ) > 0. 0 < λ < 1 , µ = 0 , X = set of endpoints of the hairs Karpińska 1999: area X > 0 (and dim ( J ( T λ,µ ) \ X ) = 1 ) . Fact: If λ, µ are such that the critical values of T λ,µ are preperiodic, then J ( T λ,µ ) = C .
Trigonometric functions T λ,µ ( z ) = sin ( λ z + µ ) 5 Devaney-Tangerman 1984: 0 < λ < 1 , µ = 0 ⇒ J ( T λ,µ ) is an uncountable union of pairwise disjoint hairs. McMullen 1987: λ � = 0 ⇒ area J ( T λ,µ ) > 0. 0 < λ < 1 , µ = 0 , X = set of endpoints of the hairs Karpińska 1999: area X > 0 (and dim ( J ( T λ,µ ) \ X ) = 1 ) . Fact: If λ, µ are such that the critical values of T λ,µ are preperiodic, then J ( T λ,µ ) = C . For example f ( z ) = sin π z .
Trigonometric functions T λ,µ ( z ) = sin ( λ z + µ ) 5 Devaney-Tangerman 1984: 0 < λ < 1 , µ = 0 ⇒ J ( T λ,µ ) is an uncountable union of pairwise disjoint hairs. McMullen 1987: λ � = 0 ⇒ area J ( T λ,µ ) > 0. 0 < λ < 1 , µ = 0 , X = set of endpoints of the hairs Karpińska 1999: area X > 0 (and dim ( J ( T λ,µ ) \ X ) = 1 ) . Fact: If λ, µ are such that the critical values of T λ,µ are preperiodic, then J ( T λ,µ ) = C . For example f ( z ) = sin π z . Schleicher 2007: For such λ, µ the Julia set C is still union of hairs. The hairs may intersect only in their endpoints. Moreover, dim ( C \ X ) = 1. In particular, area ( C \ X ) = 0.
Trigonometric functions T λ,µ ( z ) = sin ( λ z + µ ) 5 Devaney-Tangerman 1984: 0 < λ < 1 , µ = 0 ⇒ J ( T λ,µ ) is an uncountable union of pairwise disjoint hairs. McMullen 1987: λ � = 0 ⇒ area J ( T λ,µ ) > 0. 0 < λ < 1 , µ = 0 , X = set of endpoints of the hairs Karpińska 1999: area X > 0 (and dim ( J ( T λ,µ ) \ X ) = 1 ) . Fact: If λ, µ are such that the critical values of T λ,µ are preperiodic, then J ( T λ,µ ) = C . For example f ( z ) = sin π z . Schleicher 2007: For such λ, µ the Julia set C is still union of hairs. The hairs may intersect only in their endpoints. Moreover, dim ( C \ X ) = 1. In particular, area ( C \ X ) = 0. Forget complex dynamics.
Trigonometric functions T λ,µ ( z ) = sin ( λ z + µ ) 5 Devaney-Tangerman 1984: 0 < λ < 1 , µ = 0 ⇒ J ( T λ,µ ) is an uncountable union of pairwise disjoint hairs. McMullen 1987: λ � = 0 ⇒ area J ( T λ,µ ) > 0. 0 < λ < 1 , µ = 0 , X = set of endpoints of the hairs Karpińska 1999: area X > 0 (and dim ( J ( T λ,µ ) \ X ) = 1 ) . Fact: If λ, µ are such that the critical values of T λ,µ are preperiodic, then J ( T λ,µ ) = C . For example f ( z ) = sin π z . Schleicher 2007: For such λ, µ the Julia set C is still union of hairs. The hairs may intersect only in their endpoints. Moreover, dim ( C \ X ) = 1. In particular, area ( C \ X ) = 0. Forget complex dynamics. Schleicher’s result says:
Trigonometric functions T λ,µ ( z ) = sin ( λ z + µ ) 5 Devaney-Tangerman 1984: 0 < λ < 1 , µ = 0 ⇒ J ( T λ,µ ) is an uncountable union of pairwise disjoint hairs. McMullen 1987: λ � = 0 ⇒ area J ( T λ,µ ) > 0. 0 < λ < 1 , µ = 0 , X = set of endpoints of the hairs Karpińska 1999: area X > 0 (and dim ( J ( T λ,µ ) \ X ) = 1 ) . Fact: If λ, µ are such that the critical values of T λ,µ are preperiodic, then J ( T λ,µ ) = C . For example f ( z ) = sin π z . Schleicher 2007: For such λ, µ the Julia set C is still union of hairs. The hairs may intersect only in their endpoints. Moreover, dim ( C \ X ) = 1. In particular, area ( C \ X ) = 0. Forget complex dynamics. Schleicher’s result says: There exists a partition of the plane in sets X and Y , with Y of measure zero, such that Y consists of disjoint, open injective curves connecting a point in X with ∞ , and every point of X is the endpoint of at least one curve in Y .
Exponential and trigonometric functions in R 3 6
Exponential and trigonometric functions in R 3 6 A way to define the complex exponential function (if the real exponential function is known):
Exponential and trigonometric functions in R 3 6 A way to define the complex exponential function (if the real exponential function is known): − π 2 i , π � � Start with map ϕ from segment 2 i to half circle { z ∈ C : | z | = 1 , Re z ≥ 0 } . (Take ϕ ( t ) = cos t + i sin t .) Put S = { z ∈ C : | Im z | ≤ π 2 } and define E : S → { z : Re z > 0 } by E ( x + iy ) = e x ϕ ( y ) .
Exponential and trigonometric functions in R 3 6 A way to define the complex exponential function (if the real exponential function is known): − π 2 i , π � � Start with map ϕ from segment 2 i to half circle { z ∈ C : | z | = 1 , Re z ≥ 0 } . (Take ϕ ( t ) = cos t + i sin t .) Put S = { z ∈ C : | Im z | ≤ π 2 } and define E : S → { z : Re z > 0 } by E ( x + iy ) = e x ϕ ( y ) .
Exponential and trigonometric functions in R 3 6 A way to define the complex exponential function (if the real exponential function is known): − π 2 i , π � � Start with map ϕ from segment 2 i to half circle { z ∈ C : | z | = 1 , Re z ≥ 0 } . (Take ϕ ( t ) = cos t + i sin t .) Put S = { z ∈ C : | Im z | ≤ π 2 } and H = { z : Re z > 0 } . Define E : S → H by E ( x + iy ) = e x ϕ ( y ) .
Exponential and trigonometric functions in R 3 6 A way to define the complex exponential function (if the real exponential function is known): − π 2 i , π � � Start with map ϕ from segment 2 i to half circle { z ∈ C : | z | = 1 , Re z ≥ 0 } . (Take ϕ ( t ) = cos t + i sin t .) Put S = { z ∈ C : | Im z | ≤ π 2 } and H = { z : Re z > 0 } . Define E : S → H by E ( x + iy ) = e x ϕ ( y ) .
Exponential and trigonometric functions in R 3 6 A way to define the complex exponential function (if the real exponential function is known): − π 2 i , π � � Start with map ϕ from segment 2 i to half circle { z ∈ C : | z | = 1 , Re z ≥ 0 } . (Take ϕ ( t ) = cos t + i sin t .) Put S = { z ∈ C : | Im z | ≤ π 2 } and H = { z : Re z > 0 } . Define E : S → H by E ( x + iy ) = e x ϕ ( y ) .
Exponential and trigonometric functions in R 3 6 A way to define the complex exponential function (if the real exponential function is known): − π 2 i , π � � Start with map ϕ from segment 2 i to half circle { z ∈ C : | z | = 1 , Re z ≥ 0 } . (Take ϕ ( t ) = cos t + i sin t .) Put S = { z ∈ C : | Im z | ≤ π 2 } and H = { z : Re z > 0 } . Define E : S → H by E ( x + iy ) = e x ϕ ( y ) .
Exponential and trigonometric functions in R 3 6 A way to define the complex exponential function (if the real exponential function is known): − π 2 i , π � � Start with map ϕ from segment 2 i to half circle { z ∈ C : | z | = 1 , Re z ≥ 0 } . (Take ϕ ( t ) = cos t + i sin t .) Put S = { z ∈ C : | Im z | ≤ π 2 } and H = { z : Re z > 0 } . Define E : S → H by E ( x + iy ) = e x ϕ ( y ) . Extend E : S → H to a map from E : C → C by reflection.
Exponential and trigonometric functions in R 3 7
Exponential and trigonometric functions in R 3 7 Analogue in dimension 3 (Zorich 1969; also Iwaniec/Martin 2001):
Exponential and trigonometric functions in R 3 7 Analogue in dimension 3 (Zorich 1969; also Iwaniec/Martin 2001): Map square Q = { ( x , y ) ∈ R 2 : | x | ≤ 1 , | y | ≤ 1 } to hemisphere { ( x , y , z ) ∈ R 3 : x 2 + y 2 + z 2 = 1 , z ≥ 0 } by (bilipschitz) map ϕ .
Exponential and trigonometric functions in R 3 7 Analogue in dimension 3 (Zorich 1969; also Iwaniec/Martin 2001): Map square Q = { ( x , y ) ∈ R 2 : | x | ≤ 1 , | y | ≤ 1 } to hemisphere { ( x , y , z ) ∈ R 3 : x 2 + y 2 + z 2 = 1 , z ≥ 0 } by (bilipschitz) map ϕ .
Exponential and trigonometric functions in R 3 7 Analogue in dimension 3 (Zorich 1969; also Iwaniec/Martin 2001): Map square Q = { ( x , y ) ∈ R 2 : | x | ≤ 1 , | y | ≤ 1 } to hemisphere { ( x , y , z ) ∈ R 3 : x 2 + y 2 + z 2 = 1 , z ≥ 0 } by (bilipschitz) map ϕ . Define F : Q × R → R 3 by F ( x , y , z ) = e z ϕ ( x , y ) . Then F maps a “square beam” to a half-space.
Exponential and trigonometric functions in R 3 7 Analogue in dimension 3 (Zorich 1969; also Iwaniec/Martin 2001): Map square Q = { ( x , y ) ∈ R 2 : | x | ≤ 1 , | y | ≤ 1 } to hemisphere { ( x , y , z ) ∈ R 3 : x 2 + y 2 + z 2 = 1 , z ≥ 0 } by (bilipschitz) map ϕ . Define F : Q × R → R 3 by F ( x , y , z ) = e z ϕ ( x , y ) . Then F maps a “square beam” to a half-space.
Exponential and trigonometric functions in R 3 7 Analogue in dimension 3 (Zorich 1969; also Iwaniec/Martin 2001): Map square Q = { ( x , y ) ∈ R 2 : | x | ≤ 1 , | y | ≤ 1 } to hemisphere { ( x , y , z ) ∈ R 3 : x 2 + y 2 + z 2 = 1 , z ≥ 0 } by (bilipschitz) map ϕ . Define F : Q × R → R 3 by F ( x , y , z ) = e z ϕ ( x , y ) . Then F maps a “square beam” to a half-space.
Exponential and trigonometric functions in R 3 7 Analogue in dimension 3 (Zorich 1969; also Iwaniec/Martin 2001): Map square Q = { ( x , y ) ∈ R 2 : | x | ≤ 1 , | y | ≤ 1 } to hemisphere { ( x , y , z ) ∈ R 3 : x 2 + y 2 + z 2 = 1 , z ≥ 0 } by (bilipschitz) map ϕ . Define F : Q × R → R 3 by F ( x , y , z ) = e z ϕ ( x , y ) . Then F maps a “square beam” to a half-space.
Exponential and trigonometric functions in R 3 7 Analogue in dimension 3 (Zorich 1969; also Iwaniec/Martin 2001): Map square Q = { ( x , y ) ∈ R 2 : | x | ≤ 1 , | y | ≤ 1 } to hemisphere { ( x , y , z ) ∈ R 3 : x 2 + y 2 + z 2 = 1 , z ≥ 0 } by (bilipschitz) map ϕ . Define F : Q × R → R 3 by F ( x , y , z ) = e z ϕ ( x , y ) . Then F maps a “square beam” to a half-space.
Exponential and trigonometric functions in R 3 7 Analogue in dimension 3 (Zorich 1969; also Iwaniec/Martin 2001): Map square Q = { ( x , y ) ∈ R 2 : | x | ≤ 1 , | y | ≤ 1 } to hemisphere { ( x , y , z ) ∈ R 3 : x 2 + y 2 + z 2 = 1 , z ≥ 0 } by (bilipschitz) map ϕ . Define F : Q × R → R 3 by F ( x , y , z ) = e z ϕ ( x , y ) . Then F maps a “square beam” to a half-space.
Exponential and trigonometric functions in R 3 7 Analogue in dimension 3 (Zorich 1969; also Iwaniec/Martin 2001): Map square Q = { ( x , y ) ∈ R 2 : | x | ≤ 1 , | y | ≤ 1 } to hemisphere { ( x , y , z ) ∈ R 3 : x 2 + y 2 + z 2 = 1 , z ≥ 0 } by (bilipschitz) map ϕ . Define F : Q × R → R 3 by F ( x , y , z ) = e z ϕ ( x , y ) . Then F maps a “square beam” to a half-space. Extend F to a map from R 3 to R 3 by reflection.
Exponential and trigonometric functions in R 3 7 Analogue in dimension 3 (Zorich 1969; also Iwaniec/Martin 2001): Map square Q = { ( x , y ) ∈ R 2 : | x | ≤ 1 , | y | ≤ 1 } to hemisphere { ( x , y , z ) ∈ R 3 : x 2 + y 2 + z 2 = 1 , z ≥ 0 } by (bilipschitz) map ϕ . Define F : Q × R → R 3 by F ( x , y , z ) = e z ϕ ( x , y ) . Then F maps a “square beam” to a half-space. Extend F to a map from R 3 to R 3 by reflection. The map F is called Zorich map .
Exponential and trigonometric functions in R 3 7 Analogue in dimension 3 (Zorich 1969; also Iwaniec/Martin 2001): Map square Q = { ( x , y ) ∈ R 2 : | x | ≤ 1 , | y | ≤ 1 } to hemisphere { ( x , y , z ) ∈ R 3 : x 2 + y 2 + z 2 = 1 , z ≥ 0 } by (bilipschitz) map ϕ . Define F : Q × R → R 3 by F ( x , y , z ) = e z ϕ ( x , y ) . Then F maps a “square beam” to a half-space. Extend F to a map from R 3 to R 3 by reflection. The map F is called Zorich map . Similarly: analogues T : R 3 → R 3 of sine and cosine:
Exponential and trigonometric functions in R 3 7 Analogue in dimension 3 (Zorich 1969; also Iwaniec/Martin 2001): Map square Q = { ( x , y ) ∈ R 2 : | x | ≤ 1 , | y | ≤ 1 } to hemisphere { ( x , y , z ) ∈ R 3 : x 2 + y 2 + z 2 = 1 , z ≥ 0 } by (bilipschitz) map ϕ . Define F : Q × R → R 3 by F ( x , y , z ) = e z ϕ ( x , y ) . Then F maps a “square beam” to a half-space. Extend F to a map from R 3 to R 3 by reflection. The map F is called Zorich map . Similarly: analogues T : R 3 → R 3 of sine and cosine: Replace beam Q × R by half-beam Q × { x ∈ R : x ≥ 0 } .
Exponential and trigonometric functions in R 3 7 Analogue in dimension 3 (Zorich 1969; also Iwaniec/Martin 2001): Map square Q = { ( x , y ) ∈ R 2 : | x | ≤ 1 , | y | ≤ 1 } to hemisphere { ( x , y , z ) ∈ R 3 : x 2 + y 2 + z 2 = 1 , z ≥ 0 } by (bilipschitz) map ϕ . Define F : Q × R → R 3 by F ( x , y , z ) = e z ϕ ( x , y ) . Then F maps a “square beam” to a half-space. Extend F to a map from R 3 to R 3 by reflection. The map F is called Zorich map . Similarly: analogues T : R 3 → R 3 of sine and cosine: Replace beam Q × R by half-beam Q × { x ∈ R : x ≥ 0 } . Construct map T from half-beam to half-space.
Iteration in R 3 8
Iteration in R 3 8 Consider F a ( x 1 , x 2 , x 3 )= F ( x 1 , x 2 , x 3 ) − ( 0 , 0 , a ) with Zorich map F .
Iteration in R 3 8 Consider F a ( x 1 , x 2 , x 3 )= F ( x 1 , x 2 , x 3 ) − ( 0 , 0 , a ) with Zorich map F . B. 2010: For large a the function F a has an attracting fixed point ξ such that ◮ { x : f n ( x ) �→ ξ } is uncountable union of pairwise disjoint hairs, ◮ the endpoints of the hairs have Hausdorff dimension 3, ◮ the hairs without endpoints have Hausdorff dimension 1.
Iteration in R 3 8 Consider F a ( x 1 , x 2 , x 3 )= F ( x 1 , x 2 , x 3 ) − ( 0 , 0 , a ) with Zorich map F . B. 2010: For large a the function F a has an attracting fixed point ξ such that ◮ { x : f n ( x ) �→ ξ } is uncountable union of pairwise disjoint hairs, ◮ the endpoints of the hairs have Hausdorff dimension 3, ◮ the hairs without endpoints have Hausdorff dimension 1. Let T λ = λ T with T generalized cosine and λ > 0.
Iteration in R 3 8 Consider F a ( x 1 , x 2 , x 3 )= F ( x 1 , x 2 , x 3 ) − ( 0 , 0 , a ) with Zorich map F . B. 2010: For large a the function F a has an attracting fixed point ξ such that ◮ { x : f n ( x ) �→ ξ } is uncountable union of pairwise disjoint hairs, ◮ the endpoints of the hairs have Hausdorff dimension 3, ◮ the hairs without endpoints have Hausdorff dimension 1. Let T λ = λ T with T generalized cosine and λ > 0. Consider natural decomposition of R 3 into “half-beams”.
Iteration in R 3 8 Consider F a ( x 1 , x 2 , x 3 )= F ( x 1 , x 2 , x 3 ) − ( 0 , 0 , a ) with Zorich map F . B. 2010: For large a the function F a has an attracting fixed point ξ such that ◮ { x : f n ( x ) �→ ξ } is uncountable union of pairwise disjoint hairs, ◮ the endpoints of the hairs have Hausdorff dimension 3, ◮ the hairs without endpoints have Hausdorff dimension 1. Let T λ = λ T with T generalized cosine and λ > 0. Consider natural decomposition of R 3 into “half-beams”. x , y equivalent : ⇔ T k λ ( x ) and T k λ ( y ) in same half-beam for all k .
Iteration in R 3 8 Consider F a ( x 1 , x 2 , x 3 )= F ( x 1 , x 2 , x 3 ) − ( 0 , 0 , a ) with Zorich map F . B. 2010: For large a the function F a has an attracting fixed point ξ such that ◮ { x : f n ( x ) �→ ξ } is uncountable union of pairwise disjoint hairs, ◮ the endpoints of the hairs have Hausdorff dimension 3, ◮ the hairs without endpoints have Hausdorff dimension 1. Let T λ = λ T with T generalized cosine and λ > 0. Consider natural decomposition of R 3 into “half-beams”. x , y equivalent : ⇔ T k λ ( x ) and T k λ ( y ) in same half-beam for all k . Eremenko, B. 2011: For large λ , the equivalence classes are hairs. Two hairs can intersect only in their endpoints. The union of hairs without endpoints has Hausdorff dimension 1.
Iteration in R 3 8 Consider F a ( x 1 , x 2 , x 3 )= F ( x 1 , x 2 , x 3 ) − ( 0 , 0 , a ) with Zorich map F . B. 2010: For large a the function F a has an attracting fixed point ξ such that ◮ { x : f n ( x ) �→ ξ } is uncountable union of pairwise disjoint hairs, ◮ the endpoints of the hairs have Hausdorff dimension 3, ◮ the hairs without endpoints have Hausdorff dimension 1. Let T λ = λ T with T generalized cosine and λ > 0. Consider natural decomposition of R 3 into “half-beams”. x , y equivalent : ⇔ T k λ ( x ) and T k λ ( y ) in same half-beam for all k . Eremenko, B. 2011: For large λ , the equivalence classes are hairs. Two hairs can intersect only in their endpoints. The union of hairs without endpoints has Hausdorff dimension 1. Obtain paradoxical situation described before in R 3
Iteration in R 3 8 Consider F a ( x 1 , x 2 , x 3 )= F ( x 1 , x 2 , x 3 ) − ( 0 , 0 , a ) with Zorich map F . B. 2010: For large a the function F a has an attracting fixed point ξ such that ◮ { x : f n ( x ) �→ ξ } is uncountable union of pairwise disjoint hairs, ◮ the endpoints of the hairs have Hausdorff dimension 3, ◮ the hairs without endpoints have Hausdorff dimension 1. Let T λ = λ T with T generalized cosine and λ > 0. Consider natural decomposition of R 3 into “half-beams”. x , y equivalent : ⇔ T k λ ( x ) and T k λ ( y ) in same half-beam for all k . Eremenko, B. 2011: For large λ , the equivalence classes are hairs. Two hairs can intersect only in their endpoints. The union of hairs without endpoints has Hausdorff dimension 1. Obtain paradoxical situation described before in R 3 , in fact in R d .
Iteration in R 3 8 Consider F a ( x 1 , x 2 , x 3 )= F ( x 1 , x 2 , x 3 ) − ( 0 , 0 , a ) with Zorich map F . B. 2010: For large a the function F a has an attracting fixed point ξ such that ◮ { x : f n ( x ) �→ ξ } is uncountable union of pairwise disjoint hairs, ◮ the endpoints of the hairs have Hausdorff dimension 3, ◮ the hairs without endpoints have Hausdorff dimension 1. Let T λ = λ T with T generalized cosine and λ > 0. Consider natural decomposition of R 3 into “half-beams”. x , y equivalent : ⇔ T k λ ( x ) and T k λ ( y ) in same half-beam for all k . Eremenko, B. 2011: For large λ , the equivalence classes are hairs. Two hairs can intersect only in their endpoints. The union of hairs without endpoints has Hausdorff dimension 1. Obtain paradoxical situation described before in R 3 , in fact in R d . Even more paradox:
Iteration in R 3 8 Consider F a ( x 1 , x 2 , x 3 )= F ( x 1 , x 2 , x 3 ) − ( 0 , 0 , a ) with Zorich map F . B. 2010: For large a the function F a has an attracting fixed point ξ such that ◮ { x : f n ( x ) �→ ξ } is uncountable union of pairwise disjoint hairs, ◮ the endpoints of the hairs have Hausdorff dimension 3, ◮ the hairs without endpoints have Hausdorff dimension 1. Let T λ = λ T with T generalized cosine and λ > 0. Consider natural decomposition of R 3 into “half-beams”. x , y equivalent : ⇔ T k λ ( x ) and T k λ ( y ) in same half-beam for all k . Eremenko, B. 2011: For large λ , the equivalence classes are hairs. Two hairs can intersect only in their endpoints. The union of hairs without endpoints has Hausdorff dimension 1. Obtain paradoxical situation described before in R 3 , in fact in R d . Even more paradox: proof is easier than in C .
Quasiregular maps 9
Quasiregular maps 9 Zorich’s map and the analogues of the trigonometric functions are quasiregular maps from R 3 to R 3 .
Quasiregular maps 9 Zorich’s map and the analogues of the trigonometric functions are quasiregular maps from R 3 to R 3 . Let Ω ⊂ R d open, f : Ω → R d continuous.
Quasiregular maps 9 Zorich’s map and the analogues of the trigonometric functions are quasiregular maps from R 3 to R 3 . Let Ω ⊂ R d open, f : Ω → R d continuous. Then f is called quasiregular if
Quasiregular maps 9 Zorich’s map and the analogues of the trigonometric functions are quasiregular maps from R 3 to R 3 . Let Ω ⊂ R d open, f : Ω → R d continuous. Then f is called quasiregular if 1. f ∈ W 1 , d loc (Ω)
Quasiregular maps 9 Zorich’s map and the analogues of the trigonometric functions are quasiregular maps from R 3 to R 3 . Let Ω ⊂ R d open, f : Ω → R d continuous. Then f is called quasiregular if 1. f ∈ W 1 , d loc (Ω) (equivalently: f is absolutely continuous on almost all lines parallel to the coordinate axes, with first partial derivatives locally in L d ),
Quasiregular maps 9 Zorich’s map and the analogues of the trigonometric functions are quasiregular maps from R 3 to R 3 . Let Ω ⊂ R d open, f : Ω → R d continuous. Then f is called quasiregular if 1. f ∈ W 1 , d loc (Ω) (equivalently: f is absolutely continuous on almost all lines parallel to the coordinate axes, with first partial derivatives locally in L d ), 2. there exists K ≥ 1 such that | Df ( x ) | d ≤ KJ f ( x ) almost everywhere.
Quasiregular maps 9 Zorich’s map and the analogues of the trigonometric functions are quasiregular maps from R 3 to R 3 . Let Ω ⊂ R d open, f : Ω → R d continuous. Then f is called quasiregular if 1. f ∈ W 1 , d loc (Ω) (equivalently: f is absolutely continuous on almost all lines parallel to the coordinate axes, with first partial derivatives locally in L d ), 2. there exists K ≥ 1 such that | Df ( x ) | d ≤ KJ f ( x ) almost everywhere. Here Df is the derivative and J f the Jacobian determinant.
Quasiregular maps 9 Zorich’s map and the analogues of the trigonometric functions are quasiregular maps from R 3 to R 3 . Let Ω ⊂ R d open, f : Ω → R d continuous. Then f is called quasiregular if 1. f ∈ W 1 , d loc (Ω) (equivalently: f is absolutely continuous on almost all lines parallel to the coordinate axes, with first partial derivatives locally in L d ), 2. there exists K ≥ 1 such that | Df ( x ) | d ≤ KJ f ( x ) almost everywhere. Here Df is the derivative and J f the Jacobian determinant. Idea: infinitesimal balls are mapped to infinitesimal ellipsoids, with ratios of semiaxes of these ellipsoids bounded (almost everywhere).
Quasiregular maps 9 Zorich’s map and the analogues of the trigonometric functions are quasiregular maps from R 3 to R 3 . Let Ω ⊂ R d open, f : Ω → R d continuous. Then f is called quasiregular if 1. f ∈ W 1 , d loc (Ω) (equivalently: f is absolutely continuous on almost all lines parallel to the coordinate axes, with first partial derivatives locally in L d ), 2. there exists K ≥ 1 such that | Df ( x ) | d ≤ KJ f ( x ) almost everywhere. Here Df is the derivative and J f the Jacobian determinant. Idea: infinitesimal balls are mapped to infinitesimal ellipsoids, with ratios of semiaxes of these ellipsoids bounded (almost everywhere). The map f is called K -quasiregular.
Quasiregular maps 10
Quasiregular maps 10 Quasiregular maps are a natural generalization of holomorphic maps to higher dimension.
Quasiregular maps 10 Quasiregular maps are a natural generalization of holomorphic maps to higher dimension. Rickman 1980: There exists q = q ( d , K ) such that every K -quasiregular map f : R d → R d omitting q points is constant.
Quasiregular maps 10 Quasiregular maps are a natural generalization of holomorphic maps to higher dimension. Rickman 1980: There exists q = q ( d , K ) such that every K -quasiregular map f : R d → R d omitting q points is constant. Compare with Picard: q ( 2 , 1 ) = 2.
Quasiregular maps 10 Quasiregular maps are a natural generalization of holomorphic maps to higher dimension. Rickman 1980: There exists q = q ( d , K ) such that every K -quasiregular map f : R d → R d omitting q points is constant. Compare with Picard: q ( 2 , 1 ) = 2. Miniowitz 1982: Normal family analogue of Rickman’s Theorem.
Quasiregular maps 10 Quasiregular maps are a natural generalization of holomorphic maps to higher dimension. Rickman 1980: There exists q = q ( d , K ) such that every K -quasiregular map f : R d → R d omitting q points is constant. Compare with Picard: q ( 2 , 1 ) = 2. Miniowitz 1982: Normal family analogue of Rickman’s Theorem. Thus have analogue of Montel’s theorem.
Quasiregular maps 10 Quasiregular maps are a natural generalization of holomorphic maps to higher dimension. Rickman 1980: There exists q = q ( d , K ) such that every K -quasiregular map f : R d → R d omitting q points is constant. Compare with Picard: q ( 2 , 1 ) = 2. Miniowitz 1982: Normal family analogue of Rickman’s Theorem. Thus have analogue of Montel’s theorem. Hinkkanen, Martin, Mayer, and others: Fatou-Julia theory for uniformly quasiregular maps from R d to R d ; i.e., all iterates are K -quasiregular with the same K .
Quasiregular maps 10 Quasiregular maps are a natural generalization of holomorphic maps to higher dimension. Rickman 1980: There exists q = q ( d , K ) such that every K -quasiregular map f : R d → R d omitting q points is constant. Compare with Picard: q ( 2 , 1 ) = 2. Miniowitz 1982: Normal family analogue of Rickman’s Theorem. Thus have analogue of Montel’s theorem. Hinkkanen, Martin, Mayer, and others: Fatou-Julia theory for uniformly quasiregular maps from R d to R d ; i.e., all iterates are K -quasiregular with the same K . Zorich’s map and the analogues of the trigonometric functions are not uniformly quasiregular.
Quasiregular maps 10 Quasiregular maps are a natural generalization of holomorphic maps to higher dimension. Rickman 1980: There exists q = q ( d , K ) such that every K -quasiregular map f : R d → R d omitting q points is constant. Compare with Picard: q ( 2 , 1 ) = 2. Miniowitz 1982: Normal family analogue of Rickman’s Theorem. Thus have analogue of Montel’s theorem. Hinkkanen, Martin, Mayer, and others: Fatou-Julia theory for uniformly quasiregular maps from R d to R d ; i.e., all iterates are K -quasiregular with the same K . Zorich’s map and the analogues of the trigonometric functions are not uniformly quasiregular. Sun Dao Chun, Yang Lo 1999/2001: Iteration of non- uniformly K -quasiregular maps f : C → C with deg f > K .
Quasiregular maps 11
Quasiregular maps 11 Plan: develop general iteration theory for quasiregular maps f : R d → R d of transcendental type (i.e. with essential singularity at ∞ )
Quasiregular maps 11 Plan: develop general iteration theory for quasiregular maps f : R d → R d of transcendental type (i.e. with essential singularity at ∞ ) Definition: O + ( x ) = { f k ( x ): k ≥ 0 } forward orbit O − ( x ) = � ∞ k = 0 { y : f k ( y ) = x } backward orbit E ( f ) = { x : O − ( x ) is finite } exceptional set
Quasiregular maps 11 Plan: develop general iteration theory for quasiregular maps f : R d → R d of transcendental type (i.e. with essential singularity at ∞ ) Definition: O + ( x ) = { f k ( x ): k ≥ 0 } forward orbit O − ( x ) = � ∞ k = 0 { y : f k ( y ) = x } backward orbit E ( f ) = { x : O − ( x ) is finite } exceptional set Rickman’s theorem ⇒ E ( f ) is finite
Quasiregular maps 11 Plan: develop general iteration theory for quasiregular maps f : R d → R d of transcendental type (i.e. with essential singularity at ∞ ) Definition: O + ( x ) = { f k ( x ): k ≥ 0 } forward orbit O − ( x ) = � ∞ k = 0 { y : f k ( y ) = x } backward orbit E ( f ) = { x : O − ( x ) is finite } exceptional set Rickman’s theorem ⇒ E ( f ) is finite Definition: J ( f ) = { x : O + ( U ) ⊃ R d \ E ( f ) for every neighborhood U of x }
Quasiregular maps 11 Plan: develop general iteration theory for quasiregular maps f : R d → R d of transcendental type (i.e. with essential singularity at ∞ ) Definition: O + ( x ) = { f k ( x ): k ≥ 0 } forward orbit O − ( x ) = � ∞ k = 0 { y : f k ( y ) = x } backward orbit E ( f ) = { x : O − ( x ) is finite } exceptional set Rickman’s theorem ⇒ E ( f ) is finite Definition: J ( f ) = { x : O + ( U ) ⊃ R d \ E ( f ) for every neighborhood U of x } Nicks, B.: If f is bounded on a path to ∞ , then J ( f ) � = ∅ . Moreover, J ( f ) is perfect, J ( f ) = J ( f k ) for every k ∈ N and J ( f ) = O − ( x ) for every x ∈ J ( f ) .
Quasiregular maps 11 Plan: develop general iteration theory for quasiregular maps f : R d → R d of transcendental type (i.e. with essential singularity at ∞ ) Definition: O + ( x ) = { f k ( x ): k ≥ 0 } forward orbit O − ( x ) = � ∞ k = 0 { y : f k ( y ) = x } backward orbit E ( f ) = { x : O − ( x ) is finite } exceptional set Rickman’s theorem ⇒ E ( f ) is finite Definition: J ( f ) = { x : O + ( U ) ⊃ R d \ E ( f ) for every neighborhood U of x } Nicks, B.: If f is bounded on a path to ∞ , then J ( f ) � = ∅ . Moreover, J ( f ) is perfect, J ( f ) = J ( f k ) for every k ∈ N and J ( f ) = O − ( x ) for every x ∈ J ( f ) . Same conclusion also under some other hypothesis; also further properties of Julia sets.
Escaping sets of entire and quasiregular maps 12
Escaping sets of entire and quasiregular maps 12 � x : f k ( x ) → ∞ � Escaping set: I ( f ) =
Escaping sets of entire and quasiregular maps 12 � x : f k ( x ) → ∞ � Escaping set: I ( f ) = Eremenko 1989: f : C → C entire ⇒ I ( f ) � = ∅ and J ( f ) = ∂ I ( f )
Escaping sets of entire and quasiregular maps 12 � x : f k ( x ) → ∞ � Escaping set: I ( f ) = Eremenko 1989: f : C → C entire ⇒ I ( f ) � = ∅ and J ( f ) = ∂ I ( f ) In quasiregular context only J ( f ) ⊂ ∂ I ( f ) .
Escaping sets of entire and quasiregular maps 12 � x : f k ( x ) → ∞ � Escaping set: I ( f ) = Eremenko 1989: f : C → C entire ⇒ I ( f ) � = ∅ and J ( f ) = ∂ I ( f ) In quasiregular context only J ( f ) ⊂ ∂ I ( f ) . M ( r ) = max | x | = r | f ( x ) | maximum modulus;
Recommend
More recommend
Unleash a World of Digital Possibilities—Browse, Share, and Explore Content Without Boundaries