Deciding contractibility of curves on the boundary of a 3-manifold - PowerPoint PPT Presentation
Deciding contractibility of curves on the boundary of a 3-manifold Eric Colin de Verdi` ere Salman Parsa CNRS, Universit e Paris-Est Marne-la-Vall ee Sharif University of Technology France Iran The problem Given solid obstacles
Deciding contractibility of curves on the boundary of a 3-manifold ´ Eric Colin de Verdi` ere Salman Parsa CNRS, Universit´ e Paris-Est Marne-la-Vall´ ee Sharif University of Technology France Iran
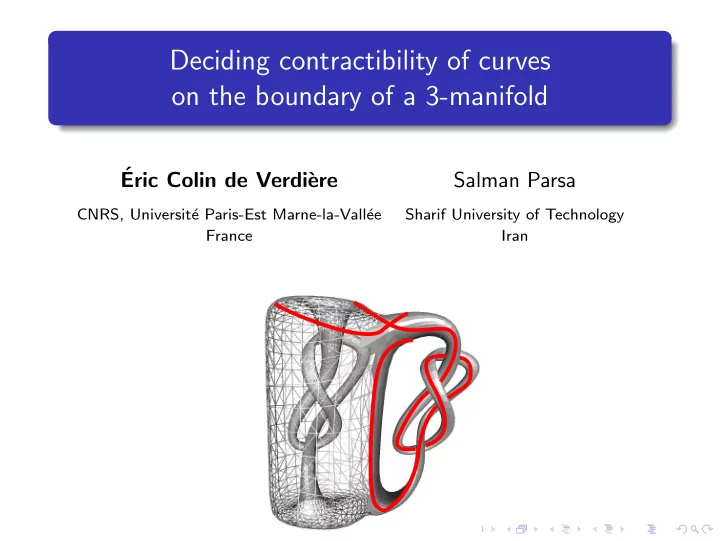
The problem Given solid obstacles in R 3 , and a closed curve c on the boundary of one obstacle, decide whether c can be shrunk continuously into a point in the complement M of the obstacles. ( = is contractible in M = is homotopic to a point in M ) More generally, M is a triangulated 3-manifold with boundary.
The problem Given solid obstacles in R 3 , and a closed curve c on the boundary of one obstacle, decide whether c can be shrunk continuously into a point in the complement M of the obstacles. ( = is contractible in M = is homotopic to a point in M ) More generally, M is a triangulated 3-manifold with boundary.
The problem Given solid obstacles in R 3 , and a closed curve c on the boundary of one obstacle, decide whether c can be shrunk continuously into a point in the complement M of the obstacles. ( = is contractible in M = is homotopic to a point in M ) More generally, M is a triangulated 3-manifold with boundary.
The problem Given solid obstacles in R 3 , and a closed curve c on the boundary of one obstacle, decide whether c can be shrunk continuously into a point in the complement M of the obstacles. ( = is contractible in M = is homotopic to a point in M ) More generally, M is a triangulated 3-manifold with boundary.
The problem Given solid obstacles in R 3 , and a closed curve c on the boundary of one obstacle, decide whether c can be shrunk continuously into a point in the complement M of the obstacles. ( = is contractible in M = is homotopic to a point in M ) More generally, M is a triangulated 3-manifold with boundary.
The problem Given solid obstacles in R 3 , and a closed curve c on the boundary of one obstacle, decide whether c can be shrunk continuously into a point in the complement M of the obstacles. ( = is contractible in M = is homotopic to a point in M ) More generally, M is a triangulated 3-manifold with boundary.
The problem Image by Tamal Dey and students Given solid obstacles in R 3 , and a closed curve c on the boundary of one obstacle, decide whether c can be shrunk continuously into a point in the complement M of the obstacles. ( = is contractible in M = is homotopic to a point in M ) More generally, M is a triangulated 3-manifold with boundary.
The problem Image by Tamal Dey and students Given solid obstacles in R 3 , and a closed curve c on the boundary of one obstacle, decide whether c can be shrunk continuously into a point in the complement M of the obstacles. ( = is contractible in M = is homotopic to a point in M ) More generally, M is a triangulated 3-manifold with boundary.
The problem Image by Tamal Dey and students Given solid obstacles in R 3 , and a closed curve c on the boundary of one obstacle, decide whether c can be shrunk continuously into a point in the complement M of the obstacles. ( = is contractible in M = is homotopic to a point in M ) More generally, M is a triangulated 3-manifold with boundary.
Testing contractibility in manifolds: known results Manifolds M is an arbitrary compact, triangulated d -manifold with boundary (each point of M has a neighborhood homeomorphic to the d -dimensional open ball or unit half-ball). Known results for testing contractibility of curves in M 2-manifolds (=surfaces): solvable in linear time [Dey and Guha, 1999] ; [Lazarus and Rivaud, 2012] ; [Erickson and Whittlesey, 2013] ; 3-manifolds: decidable via automatic group theory [Epstein, 1992] . . . but no explicit complexity bound, and best known algorithm is at least triply exponential; 4-manifolds: undecidable [Novikov, 1955] .
Testing contractibility in manifolds: known results Manifolds M is an arbitrary compact, triangulated d -manifold with boundary (each point of M has a neighborhood homeomorphic to the d -dimensional open ball or unit half-ball). Known results for testing contractibility of curves in M 2-manifolds (=surfaces): solvable in linear time [Dey and Guha, 1999] ; [Lazarus and Rivaud, 2012] ; [Erickson and Whittlesey, 2013] ; 3-manifolds: decidable via automatic group theory [Epstein, 1992] . . . but no explicit complexity bound, and best known algorithm is at least triply exponential; 4-manifolds: undecidable [Novikov, 1955] .
Testing contractibility in manifolds: known results Manifolds M is an arbitrary compact, triangulated d -manifold with boundary (each point of M has a neighborhood homeomorphic to the d -dimensional open ball or unit half-ball). Known results for testing contractibility of curves in M 2-manifolds (=surfaces): solvable in linear time [Dey and Guha, 1999] ; [Lazarus and Rivaud, 2012] ; [Erickson and Whittlesey, 2013] ; 3-manifolds: decidable via automatic group theory [Epstein, 1992] . . . but no explicit complexity bound, and best known algorithm is at least triply exponential; 4-manifolds: undecidable [Novikov, 1955] .
Testing contractibility in manifolds: known results Manifolds M is an arbitrary compact, triangulated d -manifold with boundary (each point of M has a neighborhood homeomorphic to the d -dimensional open ball or unit half-ball). Known results for testing contractibility of curves in M 2-manifolds (=surfaces): solvable in linear time [Dey and Guha, 1999] ; [Lazarus and Rivaud, 2012] ; [Erickson and Whittlesey, 2013] ; 3-manifolds: decidable via automatic group theory [Epstein, 1992] . . . but no explicit complexity bound, and best known algorithm is at least triply exponential; 4-manifolds: undecidable [Novikov, 1955] .
Our result Theorem There is an algorithm that takes as input: a triangulated 3-manifold with boundary M , with t tetrahedra, a polygonal curve c on @ M with n edges and m self-crossings, and decides whether c is contractible in M in time 2 O (( t + n + m ) 2 ) . c may be non-simple (=may have self-crossings). We assume that c is in general position on @ M .
Roadmap of the talk 1 The case where c is simple: Strong relation to the Unknot problem. (Digression:) An algorithm for this case. 2 An algorithm under a simplifying assumption. 3 The algorithm.
The Unknot problem, and the case of simple curves
The Unknot problem The Unknot problem Given a polygonal closed curve K in R 3 that is simple, determine whether K is unknotted. Theorem [Hass, Lagarias, Pippenger, 1999] The Unknot problem is in NP (thus solvable in exponential time). Remark: also in co-NP [Lackenby, 2016] , but not known to be in P! Sketch of proof Let M be obtained from R 3 by removing a neighborhood of K , and let c be a certain simple curve on @ M “parallel” to K . K unknotted ⇔ K bounds a disk in R 3 ⇔ c bounds a disk in M . Goal: Polynomial-size certificate that c bounds a disk in M .
The Unknot problem The Unknot problem Given a polygonal closed curve K in R 3 that is simple, determine whether K is unknotted. Theorem [Hass, Lagarias, Pippenger, 1999] The Unknot problem is in NP (thus solvable in exponential time). Remark: also in co-NP [Lackenby, 2016] , but not known to be in P! Sketch of proof Let M be obtained from R 3 by removing a neighborhood of K , and let c be a certain simple curve on @ M “parallel” to K . K unknotted ⇔ K bounds a disk in R 3 ⇔ c bounds a disk in M . Goal: Polynomial-size certificate that c bounds a disk in M .
The Unknot problem The Unknot problem Given a polygonal closed curve K in R 3 that is simple, determine whether K is unknotted. Theorem [Hass, Lagarias, Pippenger, 1999] The Unknot problem is in NP (thus solvable in exponential time). Remark: also in co-NP [Lackenby, 2016] , but not known to be in P! Sketch of proof Let M be obtained from R 3 by removing a neighborhood of K , and let c be a certain simple curve on @ M “parallel” to K . K unknotted ⇔ K bounds a disk in R 3 ⇔ c bounds a disk in M . Goal: Polynomial-size certificate that c bounds a disk in M .
The Unknot problem The Unknot problem Given a polygonal closed curve K in R 3 that is simple, determine whether K is unknotted. Theorem [Hass, Lagarias, Pippenger, 1999] The Unknot problem is in NP (thus solvable in exponential time). Remark: also in co-NP [Lackenby, 2016] , but not known to be in P! Sketch of proof Let M be obtained from R 3 by removing a neighborhood of K , and let c be a certain simple curve on @ M “parallel” to K . K unknotted ⇔ K bounds a disk in R 3 ⇔ c bounds a disk in M . Goal: Polynomial-size certificate that c bounds a disk in M .
The Unknot problem The Unknot problem Given a polygonal closed curve K in R 3 that is simple, determine whether K is unknotted. Theorem [Hass, Lagarias, Pippenger, 1999] The Unknot problem is in NP (thus solvable in exponential time). Remark: also in co-NP [Lackenby, 2016] , but not known to be in P! Sketch of proof Let M be obtained from R 3 by removing a neighborhood of K , and let c be a certain simple curve on @ M “parallel” to K . K unknotted ⇔ K bounds a disk in R 3 ⇔ c bounds a disk in M . Goal: Polynomial-size certificate that c bounds a disk in M .
Recommend












More recommend
Explore More Topics
Stay informed with curated content and fresh updates.