Conceiving a Fast and Practical Multispectral Stereo System Raju - PowerPoint PPT Presentation
Conceiving a Fast and Practical Multispectral Stereo System Raju Shrestha Supervisors: Jon Yngve Hardeberg, GUC Alamin Mansouri, University of Burgundy Two I maging Technologies A Multispectral system captures image data at specific
Conceiving a Fast and Practical Multispectral Stereo System Raju Shrestha Supervisors: Jon Yngve Hardeberg, GUC Alamin Mansouri, University of Burgundy
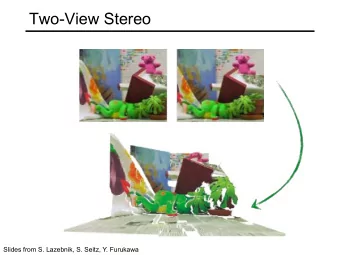
Two I maging Technologies � A Multispectral system captures image data at specific wavelengths across electromagnetic spectrum � A Stereo system records 3D visual information from two different views (like our HVS)
Multispectral I mage Acquisition � Existing state-of-the art multispectral imaging systems are slow, complex and costly
Goal � Fast and Practical Multispectral System � Using Two Digital Cameras � At the same time, capable of acquiring 3D stereo images
Main I dea � Use a pair of digital cameras or a stereo camera; in stereoscopic configurations � Best pair of filters among a number readily available filters � Resulting a Six Channel Multispectral- Stereo System
Six-Channel Multispectral system
Multispectral Camera Model � Camera sensitivities: (s 1 , s 2 ), Illumination: l, Filter transmittances: (t 1 , t 2 ), and Surface reflectance: r � Model:
Estimating Spectral Reflectance � Problem of estimating Nx1 vector R from Kx1 vector of camera response, C [N>K] => Infinite possible solutions. � Linear Model: R’ = QC From training data: Q = R train C + [ regularize ] Based on spectral (RMSE) &colorimetric Experimental ( ∆ E* ab ) evaluation metrics Simulation � Investigated with popular methods: Maloney and Wandell, Imai and Berns, Least Square Wiener, Polynomial and NN � MCC240 - Training; MCC24 - Test targets
Measurements � SPD of the light source & spectral reflectance of color charts - Spectro-radiometer � Fujifilm3D camera has been characterized using Benthem TMc300 monochromator
Simulation Approach � Carried out with several real and imaginary cameras � Nikon D70, Canon 20D, Fujifilm 3D � 265 filters from Omega � Simulated random Gaussian noise (n shot ), and quantization noise (n quant ), - realistic � Selection of Filters: Exhaustive Search that gives minimum estimation error (RMSE, ∆ E* ab ) • Additional constraints: omit <40% max. transm. and <10%of max. in a channel
A paper has been accepted in EUSIPCO2010, Denmark
Experimental Approach � Fujifilm FinePix REAL 3D W1 camera � A multiband filter: Schott BG-36 � Macbeth color charts (MCC240,MCC24) � Camera Settings :
I mage Capture and Corrections � Capture 10 images of each color charts � Linearize with Gamma values computed from central gray patches of MCC240 (C=Y γ ) :1/(1.35,1.37,1.38) � Perform DC and Non-uniformity corrections (10 images)
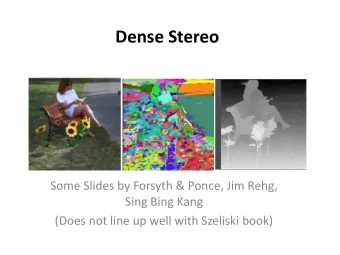
Stereo Analysis � Qualitative: Observation of 3D images � Quantitative: From Disparity Maps Observations show clear 3D Images with slightly reduced brightness
Stereo Camera Model A scene view is formed by projecting 3D points into the image plane using a perspective transformation: ' = [ | ] sp A R t P bf = Z − x x r l (X,Y,Z) – A 3D point in world coordinates (u,v) – projection point A – Camera matrix (fx, fy) – focal lengths (cx,cy) – principal point [R|t] – Matrix of extrinsic parameters k1, k2, k3 – Radial distortion coeffs. p1, p2 – Tangential ,, ,,
Camera & Stereo Calibration � Using 20 chess board images taken in different orientations � Camera calibration outputs intrinsic parameters (A & dist. coeffs.) � Stereo calibration computes extrinsic parameters ([R|t])
Disparity Maps � Compute rectification transforms – to undistort and simplify correspondence problem (epipolar geometry=>one line search) � Most commonly used Block Matching (BM) algorithm used � Compare disparity maps from our multispectral system with pure stereo
Conclusion and Future Perspectives � Both simulation and experiments show promising results => Proposed system well function as a fast and practical multispectral-stereo system � Choice of filters is important for accuracy � Slight reduction in the brightness of the 3D images and disparity info, However, quality 3D images are still viewable � Relating 3D info with the physical property would be an interesting further work
Thank You!
Comments and Suggestions? Questions,
Recommend











More recommend
Explore More Topics
Stay informed with curated content and fresh updates.