Closed-loop controls for fluids Jeff Borggaard w/ Serkan Gugercin - PowerPoint PPT Presentation
Closed-loop controls for fluids Jeff Borggaard w/ Serkan Gugercin and Lizette Zietsman 19 February 2020 Virginia Tech Outline 1. Flow Control Problem 2. Nonlinear Feedback Control 3. Quadratic-Quadratic Regulator 4. Burgers 5. van der Pol
Closed-loop controls for fluids Jeff Borggaard w/ Serkan Gugercin and Lizette Zietsman 19 February 2020 Virginia Tech
Outline 1. Flow Control Problem 2. Nonlinear Feedback Control 3. Quadratic-Quadratic Regulator 4. Burgers 5. van der Pol oscillators 1
Acknowledgments • The National Science Foundation (DMS-1819110) 2
Flow Control Problem
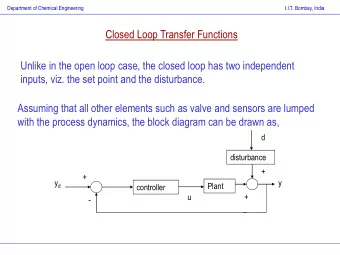
Objective Feedback Flow Control Current Strategy: • Compute the (unstable) steady-state solution ( v ss , p ss ) • Write v = v ss + v ′ and p = p ss + p ′ • Linearize the system about this steady-state (Oseen equations) − v ss · ∇ v ′ − v ′ · ∇ v ss + ∇ · τ ( v ′ ) − ∇ p ′ + B u v ′ ˙ = 0 = ∇ · v ′ • Use model reduction to find a smaller surrogate system • Design the (linear) feedback control law • Test the performance in the full nonlinear flow equations 3
Model Reduction for this study (w/ Serkan) • Discretize the Oseen equations and controlled outputs (FEM) • G ( s ) = C ( s E − A ) − 1 B • Use model reduction by tangential interpolation: Stykel 04; Mehrmann & Stykel 05; Benner & Sokolov 05; . . . ; Gugercin, Stykel & Wyatt 13. � � � � � � σ i E 11 − A 11 − A T v i B 1 b i 21 = , − A 21 0 z 0 • Apply projection matrices E r = W T EV , A r = W T AV , B r = W T B , and C r = CV • G r ( s ) = C r ( s E r − A r ) − 1 B r • Flow simulations not req’d; Input independent; Computational cost is equivalent to several implicit time-steps. 4
Model Reduction for this study (w/ Serkan) • The full-order model had n 1 = 111 , 814 and n 2 = 14 , 336. • The reduced model used r = 142. • The relative error in the H ∞ norm was 1 . 5154 × 10 − 5 . • The reduced model was used to design the control. • The projection matrices are used to implement the control on the full-order quadratic model. 5
Twin Cylinder Example At Re = 60: Linear feedback control of the cylinder angular velocities = ⇒ 6
Twin Cylinder Example At Re = 67: Linear feedback control of the cylinder angular velocities = ⇒ 7
Recommend






More recommend
Explore More Topics
Stay informed with curated content and fresh updates.