Blending Control for Fuel Production Yann Creff IFP Lyon - PDF document
Blending Control for Fuel Production Yann Creff IFP Lyon CEA-EDF-INRIA School Optimal Control: Algorithms and Applications May 30 - June 1 st 2007 - INRIA Rocquencourt, France Fuels are not directly extracted as parts of crude oils, but are
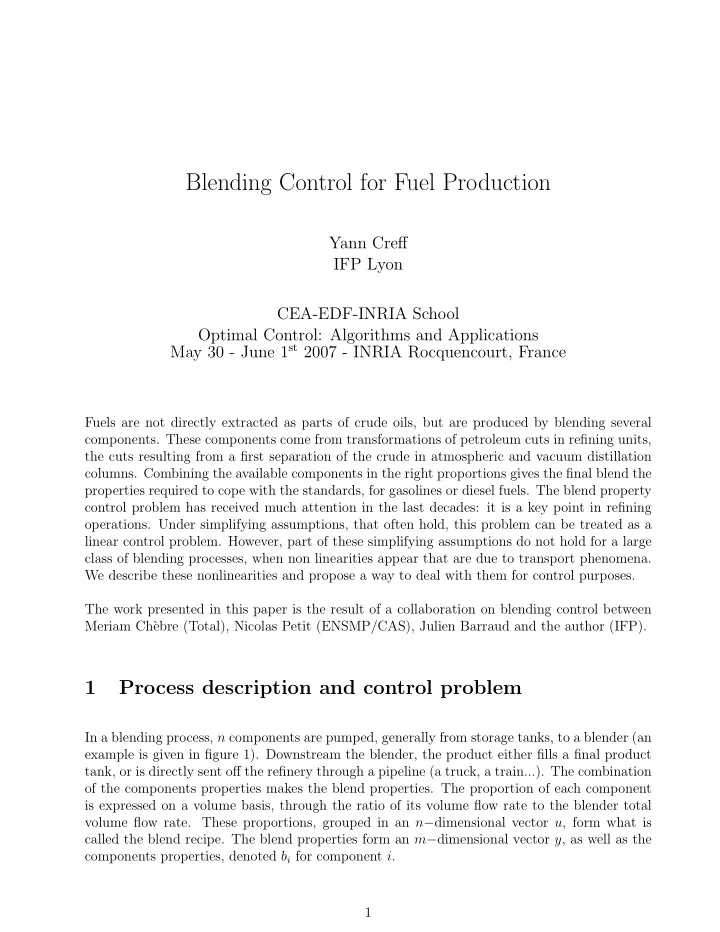
Blending Control for Fuel Production Yann Creff IFP Lyon CEA-EDF-INRIA School Optimal Control: Algorithms and Applications May 30 - June 1 st 2007 - INRIA Rocquencourt, France Fuels are not directly extracted as parts of crude oils, but are produced by blending several components. These components come from transformations of petroleum cuts in refining units, the cuts resulting from a first separation of the crude in atmospheric and vacuum distillation columns. Combining the available components in the right proportions gives the final blend the properties required to cope with the standards, for gasolines or diesel fuels. The blend property control problem has received much attention in the last decades: it is a key point in refining operations. Under simplifying assumptions, that often hold, this problem can be treated as a linear control problem. However, part of these simplifying assumptions do not hold for a large class of blending processes, when non linearities appear that are due to transport phenomena. We describe these nonlinearities and propose a way to deal with them for control purposes. The work presented in this paper is the result of a collaboration on blending control between Meriam Ch` ebre (Total), Nicolas Petit (ENSMP/CAS), Julien Barraud and the author (IFP). 1 Process description and control problem In a blending process, n components are pumped, generally from storage tanks, to a blender (an example is given in figure 1). Downstream the blender, the product either fills a final product tank, or is directly sent off the refinery through a pipeline (a truck, a train...). The combination of the components properties makes the blend properties. The proportion of each component is expressed on a volume basis, through the ratio of its volume flow rate to the blender total volume flow rate. These proportions, grouped in an n − dimensional vector u , form what is called the blend recipe. The blend properties form an m − dimensional vector y , as well as the components properties, denoted b i for component i . 1
y and ¯ From a stationary standpoint, the recipe ¯ u , the blend and component properties ¯ b i are linked by an algebraic relation. For most of the physical properties (flash point, cloud point, octane number...), this relation is nonlinear. However, it is (almost) always assumed that for each property, a transformation can be found that linearizes the blending rule. From now on, using such blending indices in place of the physical properties, we consider linear blending rules. Denoting ¯ B the ( m × n ) matrix obtained by the concatenation of the n column vectors ¯ b i , we y = ¯ then have ¯ B ¯ u . Knowing the component properties, the available quantity of each component, and the required blend properties, the scheduling department of the refinery defines a recipe. The simplest control law (still used when no on-line continuous measurements of the blend properties are available), only consists in applying recipes, that is to say ensuring a proper regulation of each component ratio. This ratio control is a simple combination of flow controllers. The computed recipe includes margins: the corresponding product properties are set to better values than those required by the standards. So, the blend remains acceptable in case of inaccuracy on the blending rules and on the components properties. Some measurements are achieved during the blend, to modify the recipe whenever necessary, and compensate for drifts or sudden changes in the components properties. As the standards were hardened, to cope with new environmental regulations, it became clear that this kind of monitoring was not acceptable anymore. As the number of properties to control increased, providing sufficient margins became difficult: many blends had to be reprocessed. Of course, producing blends with properties beyond the prescribed standards (”give away”) also reduced the benefits. The progressive introduction of on-line analyzers totally modified the picture for blending control. Feedback is now possible, offering a much better operation of the blending process. In the next section, we present the blending control problem classically addressed today. We also briefly show how it is solved. This solution relies upon the fact that each component is directly linked to the blender through a dedicated pipe, which greatly simplifies the dynamics. However, all the blending flowsheets are not that simple. It often occurs that portions of pipes are shared between components. That induces dead volumes effects (called pre-blends). The blending dynamics then present specific delays. They are described in the third section. The fourth section proposes a solution for the control law to take them into account. 2 Solution without pre-blend As all the components simultaneously reach the blender, for a current recipe u ( t ) and com- ponents properties ¯ B , the blend properties y ( t ) are given by y ( t ) = ¯ Bu ( t ). The available knowledge on the components properties being simply denoted B , Bu ( t ) is an estimate of the blend properties. The control objective is either to keep these properties at prescribed references y r , or to enforce bounds, y m ≤ y ≤ y M . 2
The recipe u ( t ) is the control vector. As it is made of proportions, we must have � n j = i u i ( t ) = 1. Moreover, each element u i ( t ) is subject to minimum and maximum bounds u m j and u M j , that summarize • the minimum quantity that must be used for the current blend, to avoid the overflowing of the storage tank, filled by upstream refining units; • the maximum quantity to be used for the current blend, to prevent component shortage for the current and the future blends; • the minimum flow rate through the pipe connecting the storage tank to the blender. This non-zero flow rate corresponds to a started pump; • the maximum flow rate for the pipe, given by the characteristics of the pump and by the geometry of the pipe. • the maximum increments and decrements between two executions of the algorithm. The blend property vector y ( t ) is the output. We can group the blend properties associated to references in y r ( r − dimensional, r ≤ m ). They correspond to an ( r × n ) sub-matrix B r . Similarly, we can group the blend properties associated to minimum bounds in y m (resp. max- imum bound in y M ). They correspond to a sub-matrix B m (resp. B M ). Note that it is a priori possible to associate a reference and bounds to the same blend property. Given an objective function J ( u ), the control problem writes min u J ( u ) 0 < u m ≤ u ≤ u M < 1 � n i =1 u i = 1 (1) B r u = y r B m u ≥ y m B M u ≤ y M The objective function is chosen to promote or avoid the introduction of some components. This can be achieved through linear or quadratic objective functions. For a restricted number of properties and components, the LP formulation for gasolines can be traced back to the early 60’s. Let us assume for the moment that this problem is feasible. If its solution is applied, except the case of perfect blending rules and perfectly known components properties, the measured properties differ from their estimations B r u , B m u and B M u , used to compute the recipe u ( t ). So, feedback from the measurements y ( t ) is required. The most common way to proceed is to add biases to the estimations used in problem (1). These are computed by filtering, at first order, the differences between the measurements and their unbiased estimations. 3
Recommend






More recommend
Explore More Topics
Stay informed with curated content and fresh updates.