Bifurcations and chaos in high-speed milling an 2 and S. John Hogan 3 obert Szalai 1 , G´ R´ abor St´ ep´ 1 szalai@mm.bme.hu, 2 stepan@mm.bme.hu, 3 s.j.hogan@bristol.ac.uk MIT, Budapest University of Technology and Economics, University of Bristol – p.1
Contents Introduction Discrete-time model Local bifurcations Chaos Delay-differential equation model – p.2
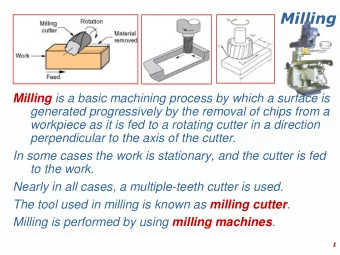
High-speed milling (standard model) Calculation of the cutting force: F t c = K t wh 3 / 4 ( t ) and F n c = K n wh 3 / 4 ( t ) , [Tlusty, 2000], [Burns and Davies, 2002]. – p.3
History Mostly stability results and simulation. Averaging and harmonic balance techniques [Minis, Y. Altintas] Semi-discretization [T. Insperger and G. Stepan] Time finite element analysis [B. Mann and P . Bayly] Heuristic assumptions for period-doubling boundaries [W. Corpus and W. Endres] Discrete time model [Davies and T. Burns] Analytical stability chart [R. Szalai and G. Stepan] – p.4
Mechanical model c k x m F x x ( t − τ ) h ( t ) k 1 ∆ x ∆ x x ( t ) τ 1 τ 2 τ h h 0 Equation of motion: m ( h 0 + x ( t − τ ) − x ( t )) 3 / 4 , n x ( t ) = g ( t ) K w x ( t ) + ω 2 x ( t ) + 2 ζω n ˙ ¨ where � 0 , kτ ≤ t < kτ + τ 1 if g ( t ) = kτ + τ 1 ≤ t < ( k + 1) τ, k ∈ Z . 1 , if – p.5
Discrete-time model c k m F x x (˜ t − ˜ τ ) h (˜ t ) k 1 ∆ x ∆ x x (˜ t ) ˜ τ 2 ˜ τ h h 0 x (˜ x (˜ t ) + s x (˜ ˜ t ∈ [˜ t 0 , ˜ m ¨ t ) + k ˙ t ) = 0 , t 0 + ˜ τ 1 ] � � x (˜ x (˜ τ 2 F c ( h (˜ t ∈ [˜ ˜ τ 1 , ˜ m ˙ t ) − ˙ t − ˜ τ 2 ) = ˜ t )) , t 0 + ˜ t 0 + ˜ τ ] , where h (˜ t ) = h 0 + x (˜ τ ) − x (˜ t − ˜ t ) , h 0 = v 0 ˜ τ , and F c ( h ( t )) = Kw h 3 / 4 ( t ) is the cutting force. – p.6
Mathematical model � Natural eigenfrequency: ω n = s/m Relative damping: ζ = k/ (2 √ s m ) Dimensionless time: t = ω n ˜ t � 1 − ζ 2 . Dimensionless eigenfrequency: ˆ ω d = State transition between t j = t 0 + jτ and t j +1 is described by x j +1 x j 0 = A + . n ( h 0 + (1 − A 11 ) x j − A 12 v j ) 3 / 4 Kwτ 2 v j +1 v j mω 2 where x j = x ( t j ) , v j = ˙ x ( t j ) and 0 1 τ 1 A = exp − 1 ζ – p.7
Stability The linearized equation around the fixed point x j +1 A 11 A 12 x j = . v j +1 A 21 + ˆ w (1 − A 11 ) A 22 − ˆ w A 12 v j � �� � B Stability boundaries: cr = det A + tr A + 1 cos(ˆ ω d τ ) + cosh( ζτ ) w f ˆ = ˆ ω d 2 A 12 sin(ˆ ω d τ ) cr = det A − 1 sinh( ζτ ) w ns = − 2ˆ ˆ ω d ω d τ ) , A 12 sin(ˆ where 3 Kτ 2 w = ˆ w 4 h 1 / 4 mω 2 n 0 – p.8
Stability chart – p.9
Flip Bifurcation Consider the following perturbation of the linear system around the fixed point in the basis of the eigenvectors X c ij ξ i n η j 0 1 0 1 0 1 0 1 n @ − 1 + a f ∆ ˆ @ ξ n +1 w 0 @ ξ n i + j =2 , 3 A = A + B C A , B C A X d ij ξ i n η j η n +1 0 λ 2 η n @ n i + j =2 , 3 Using center manifold and normal form reduction we find that there is a period two orbit on the center manifold � wa f − ∆ ˆ ξ 1 , 2 = , δ where 5 cosh( ζτ ) + cos(ˆ ω d τ ) δ = − ω d τ ) < 0 . 12 h 2 cosh( ζτ ) + 2 sinh( ζτ ) + cos(ˆ 0 Hence, the bifurcation is subcritical! – p.10
Simulation – p.11
Neimark-Sacker bifurcation Similarly, the Taylor expansion of the system in the eigenbasis � c ij ξ i n η j � � � � � � n e iϕ ξ n +1 0 ξ n i + j =2 , 3 = (1 + | a h | ∆ ˆ w ) + . � e − iϕ d ij ξ i n η j η n +1 0 η n n i + j =2 , 3 The radius of the invariant circle (in the eigenbasis) s s w + | a h | 2 ∆ ˆ − 2 | a h | ∆ ˆ w 2 − | a h | ∆ ˆ w R = ≈ , 2(1 + | a h | ∆ ˆ w ) δ δ where δ = e − 5 ζτ 1 (4e 4 ζτ 1 − 3e 2 ζτ 1 − 1)(cosh( ζτ 1 ) − cos( ω d τ 1 )) , 32 h 2 0 This is subcritical, too! – p.12
Simulation – p.13
Period-2 motion with ‘fly-overs’ The motion exists if: cos(ˆ ω d τ )+cosh( ζτ ) w > 3ˆ ω d ˆ 2 7 / 4 sin(ˆ ω d τ ) It is stable when cos(2 ω d τ 1 ) + cosh(2 ζτ 1 ) w < 2 1 / 4 ω d ˆ sin(2 ω d τ 1 ) or sinh(2 ζτ 1 ) w < − 2 7 / 4 ω d ˆ sin(2 ω d τ 1 ) . – p.14
Stability chart – p.15
Bifurcation diagram 1 6 (a) 5 4 3 t n i o p 2 - d 2 o i r e p e l b a t s 1 x fixed point 0 -1 -2 -3 -4 0 0.2 0.4 0.6 0.8 1.0 1.2 1.4 1.6 1.8 ^ w – p.16
Bifurcation diagram 2 3 chaos (b) 2.5 2 stable period-2 point 1.5 x 1 fixed point unstable period-2 point 0.5 0 -0.5 0.6 0.8 1.0 1.2 1.4 1.6 1.8 ^ w – p.17
Bifurcation diagram 3 3 (c) chaos 2.5 2 x fixed point 1.5 unstable period-2 orbits 1 0.5 1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8 1.9 ^ w – p.18
Smale horseshoe s W F 3 (a) (b) P c 3 2 s switching�line W 0 P B 2 P 2.8 2 2.5 switching�line H 1 V 1 2.6 P 2 E D u W h 0 u 2 P W V 2 P 0 2.4 1 A P 1 v/h 0 h u 1.5 2.2 H 0 W P u s 2 W W P P 1 C 1 2 horseshoe 1 V 0 1.8 H 1 P 1 0.5 1.6 H 0 s W V P 1 1 1.4 0 0.6 0.8 1 1.2 1.4 1.6 1.8 2 2.2 2.4 0.6 0.8 1 1.2 1.4 1.6 1.8 x/h x/h 0 0 – p.19
Chaos The transition matrix of the symbolic dynamics: � � � � 0 1 1 1 T 2 = ⇒ T irreducible T = , = 1 1 1 2 – p.20
Delay differential equation model – p.21
Mechanical model s k x m F x x ( t − τ ) h ( t ) k 1 ∆ x ∆ x x ( t ) τ 1 τ 2 τ h h 0 – p.22
Mechanical model s k x m F x x ( t − τ ) h ( t ) k 1 ∆ x ∆ x x ( t ) τ 1 τ 2 τ h h 0 Equation of motion: m ( h 0 + x ( t − τ ) − x ( t )) 3 / 4 , n x ( t ) = g ( t ) K w x ( t ) + ω 2 x ( t ) + 2 ζω n ˙ ¨ where � 0 , kτ ≤ t < kτ + τ 1 if g ( t ) = kτ + τ 1 ≤ t < ( k + 1) τ, k ∈ Z . 1 , if – p.22
Variational system Linearized equation with dimensionless time (ˆ t = ω n t ) : � � x (ˆ x (ˆ t ) + x (ˆ t ) = g (ˆ x (ˆ τ ) − x (ˆ t − ˆ ¨ t ) + 2 ζ ˙ t ) ˆ w t ) , w = 3 Kw/ (4 h 1 / 4 0 mω 2 where ˆ n ) is the dimenzionless chip width. – p.23
Variational system Linearized equation with dimensionless time (ˆ t = ω n t ) : � � x (ˆ x (ˆ t ) + x (ˆ t ) = g (ˆ x (ˆ τ ) − x (ˆ t − ˆ ¨ t ) + 2 ζ ˙ t ) ˆ w t ) , w = 3 Kw/ (4 h 1 / 4 0 mω 2 where ˆ n ) is the dimenzionless chip width. Rewritten into 1 st order form ( x (ˆ t )) T ): t ) = ( x (ˆ x (ˆ t ) , ˙ τ ) = A (ˆ t ) x (ˆ t ) + B (ˆ t ) x (ˆ ˙ t − ˆ x (ˆ τ ) , where � � � � 0 1 0 0 A ( t ) = , B ( t ) = . − 1 − g ( t ) ˆ − 2 ζ w g ( t ) ˆ w 0 – p.23
Stability analysis τ characteristic multiplier e λ ˆ � x ( t ) = e λt v ( t ) satisfies the equation such that v ( t ) = v ( t + ˆ τ ) – p.24
Stability analysis τ characteristic multiplier e λ ˆ � x ( t ) = e λt v ( t ) satisfies the equation such that v ( t ) = v ( t + ˆ τ ) The periodic solution is assimptotically stable if for each characteristic multiplier | e λ ˆ τ | < 1 . – p.24
Stability analysis τ characteristic multiplier e λ ˆ � x ( t ) = e λt v ( t ) satisfies the equation such that v ( t ) = v ( t + ˆ τ ) The periodic solution is assimptotically stable if for each characteristic multiplier | e λ ˆ τ | < 1 . Exploiting the first condition we are left with the BVP � � A ( t ) + e − λ ˆ τ B ( t ) − λ I v ( t ) = ˙ v ( t ) v (0) = v (ˆ τ ) . – p.24
Stability analysis The BVP is solvable iff τ ) − I ) , 0 = f ( µ ) := det ( Φ (ˆ where τ ) = µ e ( A 2 + µ B 2 )ˆ τ 2 e ( A 1 + µ B 1 )ˆ τ 1 , Φ (ˆ µ = e − λ ˆ τ , � � � � 0 1 0 0 A 1 = , B 1 = , − 1 − 2 ζ 0 0 � � � � 0 1 0 0 A 2 = , B 2 = . − 1 − ˆ − 2 ζ w w ˆ 0 – p.25
Argument principle τ ) − 1 f | µ | < 1 cause instability. They can Roots for which µ = (e λ ˆ be easily counted � � f ′ ( z ) 1 f ( z ) d z = 1 N = d arg f 2 πi 2 π γ γ n f (exp( j 2 π n i )) = 1 � arg f (exp(( j − 1) 2 π 2 π n i ) j =1 – p.26
Stability chart – p.27
Machining with ‘fly-over’ effect x ( t ) + 2 ζ ˙ ¨ x ( t ) + x ( t ) = g ( ϕ ) ˆ w (cos ϕ + 0 . 3 sin ϕ ) × × [ H (( h 0 + x ( t − 2 τ ) − x ( t − τ ))) F c (( h 0 + x ( t − τ ) − x ( t )) sin ϕ ) + H (( h 0 + x ( t − τ ) − x ( t − 2 τ ))) F c ((2 h 0 + x ( t − 2 τ ) − x ( t )) sin ϕ )] – p.28
Numerical method Orthogonal collocation m m θ − θ i + r � � ϕ ( θ ) = ˜ ϕ ( θ i + j m ) P i,j ( θ ) P i,j ( θ ) = m m − θ i + r θ i + j j =0 r =0 ,r � = j m The equation is satisfied at c i,j ˙ ϕ ( c i,j − τ ϕ ( c i,j ) = f ( c i,j , ˜ ˜ ϕ ( c i,j ) , ˜ mod T )) – p.29 [Engelborghs and Doedel, 2001]
Recommend
More recommend
Unleash a World of Digital Possibilities—Browse, Share, and Explore Content Without Boundaries