Bayesian Tracking: Basic Idea Iterative updating of conditional - PowerPoint PPT Presentation
Bayesian Tracking: Basic Idea Iterative updating of conditional probability densities! kinematic target state x k at time t k , accumulated sensor data Z k a priori knowledge: target dynamics models, sensor model, road maps dynamics model p ( x k
Bayesian Tracking: Basic Idea Iterative updating of conditional probability densities! kinematic target state x k at time t k , accumulated sensor data Z k a priori knowledge: target dynamics models, sensor model, road maps dynamics model p ( x k − 1 |Z k − 1 ) p ( x k |Z k − 1 ) • prediction: − − − − − − − − − − → road maps sensor data Z k p ( x k |Z k − 1 ) p ( x k |Z k ) • filtering: − − − − − − − − − − → sensor model filtering output p ( x l − 1 |Z k ) p ( x l |Z k ) • retrodiction: ← − − − − − − − − − − dynamics model − finite mixture: inherent ambiguity (data, model, road network ) − optimal estimators: e.g. minimum mean squared error (MMSE) − initiation of pdf iteration: multiple hypothesis track extraction Sensor Data Fusion - Methods and Applications, 5th Lecture on November 21, 2018 — slide 1
• p ( x k |Z k − 1 ) is a prediction of the target state at time t k based on all measurements in the past . p ( x k |Z k − 1 ) = � d x k − 1 p ( x k , x k − 1 |Z k − 1 ) marginal pdf = � d x k − 1 p ( x k | x k − 1 , Z k − 1 ) p ( x k − 1 |Z k − 1 ) notion of a conditional pdf � �� � � �� � object dynamics! idea: iteration! often: p ( x k | x k − 1 , Z k − 1 ) = p ( x k | x k − 1 ) (M ARKOV ) sometimes: p ( x k | x k − 1 ) = N � x k ; F k | k − 1 � x k − 1 , D k | k − 1 (linear G AUSS -M ARKOV ) � �� � � �� � deterministic random • p ( Z k , m k | x k ) ∝ ℓ ( x k ; Z k , m k ) describes, what the current sensor output Z k , m k can say about the current target state x k and is called likelihood function . � � sometimes: ℓ ( z k ; x k ) = N x k ; H k x k , R k (1 target, 1 measurement) ℓ ( x k ; Z k , m k ) � d x k − 1 p ( x k | x k − 1 ) p ( x k − 1 |Z k − 1 ) p ( x k |Z k ) = iteration formula: � d x k ℓ ( x k ; Z k , m k ) � d x k − 1 p ( x k | x k − 1 ) p ( x k − 1 |Z k − 1 ) Sensor Data Fusion - Methods and Applications, 5th Lecture on November 21, 2018 — slide 2
G AUSS ian transition pdf: p ( x k | x k − 1 , Z k − 1 ) = N ( x k ; F k | k − 1 x k − 1 , D k | k − 1 ) with: F k | k − 1 (evolution matrix) , D k | k − 1 (dynamics covariance matrix) � �� � � �� � describes deterministic motion models of random maneuvers G AUSS ian posterior: p ( x k − 1 |Z k − 1 ) = N ( x k − 1 ; x k − 1 | k − 1 , P k − 1 | k − 1 ) � � � � � p ( x k |Z k − 1 ) = d x k − 1 N N x k ; F k | k − 1 x k − 1 , D k | k − 1 x k − 1 ; x k − 1 | k − 1 , P k − 1 | k − 1 � �� � � �� � dynamics model posterior at time t k − 1 = N � x k ; F k | k − 1 x k − 1 | k − 1 � , F k | k − 1 P k − 1 | k − 1 F ⊤ k | k − 1 + D k | k − 1 � �� � � �� � =: x k | k − 1 =: P k | k − 1 � d x k − 1 N � x k − 1 ; . . . , . . . � × (exploit product formula!) � �� � =1 (normalization!) = N ( x k ; x k | k − 1 , P k | k − 1 ) Sensor Data Fusion - Methods and Applications, 5th Lecture on November 21, 2018 — slide 3
k ) ⊤ , Z k = { z k , Z k − 1 } Kalman filter: linear G AUSS ian likelihood/dynamics, x k = ( r ⊤ r ⊤ r ⊤ k , ˙ k , ¨ � � p ( x 0 ) = N x 0 ; x 0 | 0 , P 0 | 0 initiation: , initial ignorance: P 0 | 0 ‘large’ � � dynamics model � � N − − − − − − − − − → N prediction: x k − 1 ; x k − 1 | k − 1 , P k − 1 | k − 1 x k ; x k | k − 1 , P k | k − 1 F k | k − 1 , D k | k − 1 x k | k − 1 = F k | k − 1 x k − 1 | k − 1 ⊤ + D k | k − 1 P k | k − 1 = F k | k − 1 P k − 1 | k − 1 F k | k − 1 N � x k ; x k | k − 1 , P k | k − 1 � � � current measurement z k − − − − − − − − − − − − − → N x k ; x k | k , P k | k filtering: sensor model: H k , R k ν k | k − 1 = z k − H k x k | k − 1 x k | k = x k | k − 1 + W k | k − 1 ν k | k − 1 , S k | k − 1 = H k P k | k − 1 H k ⊤ + R k P k | k − 1 − W k | k − 1 S k | k − 1 W k | k − 1 ⊤ , = P k | k W k | k − 1 = P k | k − 1 H k ⊤ S k | k − 1 − 1 ‘K ALMAN gain matrix’ � � filtering, prediction � � retrodiction: N x l ; x l | k , P l | k ← − − − − − − − − − − N x l +1 ; x l +1 | k , P l +1 | k dynamics model l +1 | l P − 1 W l | l +1 = P l | l F ⊤ = x l | l + W l | l +1 ( x l +1 | k − x l +1 | l ) , x l | k l +1 | l P l | l + W l | l +1 ( P l +1 | k − P l +1 | l ) W l | l +1 ⊤ = P l | k Sensor Data Fusion - Methods and Applications, 5th Lecture on November 21, 2018 — slide 4
Sensor Data Fusion - Methods and Applications, 5th Lecture on November 21, 2018 — slide 5
in practical applications: uncertainty on which dynamics model j k out of a set of r alternatives is in effect at t k (IMM: Interacting Multiple Models) Sensor Data Fusion - Methods and Applications, 5th Lecture on November 21, 2018 — slide 6
Quite general: agent switching between different modes of over-all behavior M1 M2 M3 Sensor Data Fusion - Methods and Applications, 5th Lecture on November 21, 2018 — slide 7
Quite general: agent switching between different modes of over-all behavior M1 M2 M3 Sensor Data Fusion - Methods and Applications, 5th Lecture on November 21, 2018 — slide 8
Quite general: agent switching between different modes of over-all behavior P(1|1) P(2|1) M1 M2 P(3|1) M3 P(1|1) + P(2|1) + P(3|1) = 1 Sensor Data Fusion - Methods and Applications, 5th Lecture on November 21, 2018 — slide 9
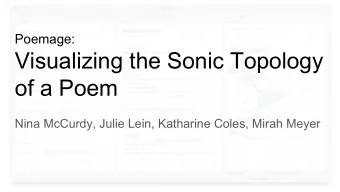
Quite general: agent switching between different modes of over-all behavior P(1|1) P(2|2) P(2|1) M1 M2 P(1|2) P(1|3) P(2|3) P(3|1) P(3|2) M3 P(1|1) + P(2|1) + P(3|1) = 1 P(1|2) + P(2|2) + P(3|2) = 1 P(3|3) P(1|3) + P(2|3) + P(3|3) = 1 Sensor Data Fusion - Methods and Applications, 5th Lecture on November 21, 2018 — slide 10
A quite general mathematical structure: a graph, characterized by nodes (here: evolution models) and directed edges defining an adjacency matrix (here: transition matrix P , stochastic matrix: columns sum up to one) initial information on which model is currently being in effect: p k = ( p 1 k , p 2 k , p 3 k ) ⊤ p 1 p (1 | 1) p (1 | 2) p (1 | 3) k − 1 p 2 Markov propagation: p (2 | 1) p (2 | 2) p (2 | 3) p k = P p k − 1 = k − 1 p 3 p (3 | 1) p (3 | 2) p (3 | 3) k − 1 Perron-Frobenius: the spectral radius of stochastic matrices is 1, 1 is also an eigenvalue and the corresponding eigenvector is positive. 0 . 5 0 . 3 0 . 2 0 . 2 0 . 4 0 . 4 Exercise: Consider the example: 0 . 3 0 . 3 0 . 4 and calculate the invariant state (eigenvector for eingenvalue 1). Show numerically or mathematically that each initial state converges to the invariant state. Sensor Data Fusion - Methods and Applications, 5th Lecture on November 21, 2018 — slide 11
Excursus: Stochastic Characterization of Object Interrelations: Estimation and Tracking of Adjacency Matrices • Multiple object tracking: estimate from uncertain data Z at each time the kinematic state vector of all relevant objects: p ( x | Z ) . • Sometimes of interest: interrelations between tracked objects. Example: reachability between two objects (communications, mutual help). • Interrelations completely described by the adjacency matrix X of a graph (nodes: tracked objects, matrix elements: properties of the interrelation). • Uncertainty of sensor data (kinematics, attributes) z , Z : adjacency matrix is a random matrix (matrix variate probability densities). • State to be estimated: kinematics x of all objects, adjacency matrix X . Based on the sensor data, the knowledge on x , X is contained in: p ( x, X | z, Z ) . • suitable families of matrix variate densities and likelihood functions: Bayes! Sensor Data Fusion - Methods and Applications, 5th Lecture on November 21, 2018 — slide 12
in practical applications: uncertainty on which dynamics model j k out of a set of r alternatives is in effect at t k (IMM: Interacting Multiple Models) ! p ( x k , j k | x k − 1 , j k − 1 ) = p ( x k | j k , x k − 1 , j k − 1 ) p ( j k | x k − 1 , j k − 1 ) = p ( x k | x k − 1 , j k ) p ( j k | j k − 1 ) (M ARKOV ) N � x k ; F j k � k | k − 1 x k − 1 , D j k = p ( j k | j k − 1 ) k | k − 1 � �� � � �� � interaction dynamics model j k Sensor Data Fusion - Methods and Applications, 5th Lecture on November 21, 2018 — slide 13
in practical applications: uncertainty on which dynamics model j k out of a set of r alternatives is in effect at t k (IMM: Interacting Multiple Models) p ( x k , j k | x k − 1 , j k − 1 ) = p ( x k | x k − 1 , j k ) p ( j k | j k − 1 ) (M ARKOV ) � � x k ; F j k k | k − 1 x k − 1 , D j k = p ( j k | j k − 1 ) N k | k − 1 � �� � � �� � interaction dynamics model j k previous posterior written as a G AUSS ian mixture: r r � � � � x k − 1 ; x j k − 1 k − 1 | k − 1 , P j k − 1 p ( x k − 1 |Z k − 1 ) = p ( x k − 1 , j k − 1 |Z k − 1 ) = p ( j k − 1 |Z k − 1 ) N , k − 1 | k − 1 j k − 1 =1 j k − 1 =1 Sensor Data Fusion - Methods and Applications, 5th Lecture on November 21, 2018 — slide 14
Recommend















More recommend
Explore More Topics
Stay informed with curated content and fresh updates.