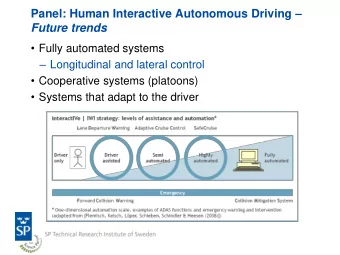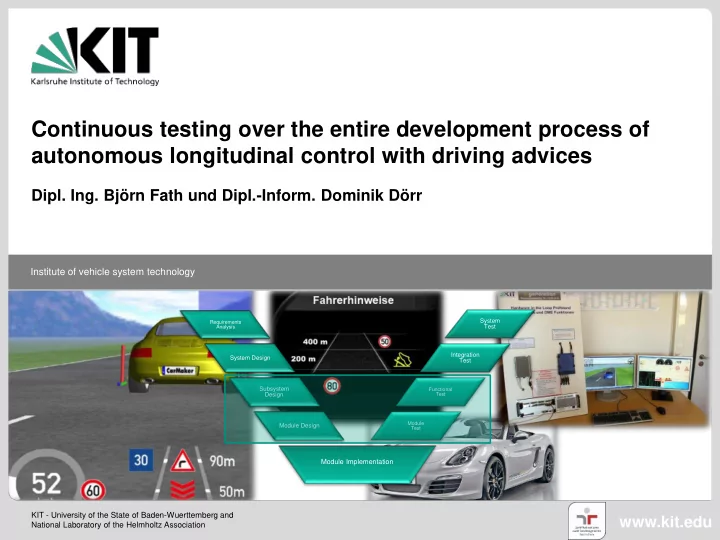
Continuous testing over the entire development process of autonomous longitudinal control with driving advices Dipl. Ing. Björn Fath und Dipl.-Inform. Dominik Dörr Institute of vehicle system technology System Requirements Analysis Test Integration System Design Test Subsystem Functional Design Test M Module Module Design Test Module Implementation KIT - University of the State of Baden-Wuerttemberg and www.kit.edu National Laboratory of the Helmholtz Association
Inhalt Motivation Unit under Test Driving Advices in CarMaker Process of testing Offline Test Hardware in the loop testing Vehicle test Conclusions and results Outlook 2 23.09.2016 Dipl. Ing. Björn Fath und Dipl.-Inform. Dominik Dörr Institute of vehicle system technology
Motivation Many tests during development of driver assistance systems Vehicle Prototype Very hardly tests expensive available Tests during whole development process Save Save time money 3 23.09.2016 Dipl. Ing. Björn Fath und Dipl.-Inform. Dominik Dörr Institute of vehicle system technology
Unit under Test Driving Assistance system EeDA – E fficient eD rive A ssistant EeDA Automated Assisted Vehicle is following a calculated Driver gets advices to perform trajectory autonomously. Driver an efficient way of driving has only to steer. 4 23.09.2016 Dipl. Ing. Björn Fath und Dipl.-Inform. Dominik Dörr Institute of vehicle system technology
Unit under Test EeDA Adaptive v(s) Trajectory Motor torque CAN bus data vehicle controller generation model Internal route data Route data Route data processing Driving Driving Optic and haptic feedback for CAN bus data style advices driver recognition 5 23.09.2016 Dipl. Ing. Björn Fath und Dipl.-Inform. Dominik Dörr Institute of vehicle system technology
Driving Advices Debugging with plots or numbers only is hard visual driving advices where implemented as Overlay in Movie using Tcl/Tk recommended behaviour for next current speed limit situation speed advice regarding next situation Distance to next situation Distance to next recommended type of next situation behaviour 6 23.09.2016 Dipl. Ing. Björn Fath und Dipl.-Inform. Dominik Dörr Institute of vehicle system technology
Driving Advices Debugging with plots or numbers only is hard visual driving advices where implemented as Overlay in Movie using Tcl/Tk recommended behaviour for next current speed limit situation speed advice regarding next situation Distance to next situation Distance to next recommended type of next situation behaviour 7 23.09.2016 Dipl. Ing. Björn Fath und Dipl.-Inform. Dominik Dörr Institute of vehicle system technology
Driving Advices Debugging with plots or numbers only is hard visual driving advices where implemented as Overlay in Movie using Tcl/Tk recommended behaviour for next current speed limit situation speed advice regarding next situation Distance to next situation Distance to next recommended type of next situation behaviour 8 23.09.2016 Dipl. Ing. Björn Fath und Dipl.-Inform. Dominik Dörr Institute of vehicle system technology
Driving Advices speed limit 50 curve left curve right hilltop more possible 9 23.09.2016 Dipl. Ing. Björn Fath und Dipl.-Inform. Dominik Dörr Institute of vehicle system technology
Driving Advices Debugging with plots or numbers only is hard visual driving advices where implemented as Overlay in Movie using Tcl/Tk recommended behaviour for next current speed limit current speed limit situation speed advice regarding next speed advice regarding next situation situation Distance to next situation Distance to next recommended type of next situation type of next situation behaviour 10 23.09.2016 Dipl. Ing. Björn Fath und Dipl.-Inform. Dominik Dörr Institute of vehicle system technology
Driving Advices Acceleration Sailing Braking Recuperation stage 1 Recuperation stage 2 Recuperation stage 3 11 23.09.2016 Dipl. Ing. Björn Fath und Dipl.-Inform. Dominik Dörr Institute of vehicle system technology
Driving Advices Debugging with plots or numbers only is hard visual driving advices where implemented as Overlay in Movie using Tcl/Tk recommended behaviour for next current speed limit situation speed advice regarding next situation Distance to next situation Distance to next recommended type of next situation behaviour 12 23.09.2016 Dipl. Ing. Björn Fath und Dipl.-Inform. Dominik Dörr Institute of vehicle system technology
Driving Advices Debugging with plots or numbers only is hard visual driving advices where implemented as Overlay in Movie using Tcl/Tk recommended behaviour for next current speed limit situation speed advice regarding next situation Distance to next situation Distance to next recommended type of next situation behaviour 13 23.09.2016 Dipl. Ing. Björn Fath und Dipl.-Inform. Dominik Dörr Institute of vehicle system technology
V-model System Requirements Test Analysis System Integration Design Test Subsystem Functional Design Test Module Module Design Test Module Implementation 14 23.09.2016 Dipl. Ing. Björn Fath und Dipl.-Inform. Dominik Dörr Institute of vehicle system technology
Process of testing – Offline test System Requirements Test Analysis System Integration Design Test Subsystem Functional Design Test Module Module Design Test Module Implementation 15 23.09.2016 Dipl. Ing. Björn Fath und Dipl.-Inform. Dominik Dörr Institute of vehicle system technology
Offline test - Overview Requi reme System nts Test Analy sis Syste m Integration Desig Test n Subsy Functi stem onal Design Test Functional module test Modul Modul M e e Desig Test n Module Implementation CarMaker-Office is used Modules are build as Plugin-models with Matlab/Simulink and compiled with Realtime Workshop Route data could not be received from external source (navigation system, Car-PC, …) method to determine route data directly from CarMaker needed 16 23.09.2016 Dipl. Ing. Björn Fath und Dipl.-Inform. Dominik Dörr Institute of vehicle system technology
Process of testing – route data generation Requi reme System nts Test Analy sis Syste m Integration Desig Test n Subsy Functi stem onal Design Test Modul Modul M e e Desig Test n Module Implementation CarMaker C#-Code Simulink Vector of Road model route data • calculating road bend • Contains all • more than 3000 • Same format • determining needed blocks like in the car slope and features speed limit 17 23.09.2016 Dipl. Ing. Björn Fath und Dipl.-Inform. Dominik Dörr Institute of vehicle system technology
Process of testing – Hardware in the loop test System Requirements Test Analysis System Integration Design Test Subsystem Functional Design Test Module Module Design Test Module Implementation 18 23.09.2016 Dipl. Ing. Björn Fath und Dipl.-Inform. Dominik Dörr Institute of vehicle system technology
HIL Test - Overview Require System ments Test Analy sis Syste m Integration Desig Test n Software on ETAS ES910 rapid prototyping ECU Subsyste Functional m Design Test M Module Module Design Test CarMaker-HIL with Xpack4 Module Implementation Route Data provided by separate CarPC Engine controller in the loop Residual bus simulation of 500 signals and 4 CANs in Simulink 19 23.09.2016 Dipl. Ing. Björn Fath und Dipl.-Inform. Dominik Dörr Institute of vehicle system technology
HIL Test - HIL test bench set-up Require System ments Test Analy sis Syste m Integration Host PC Desig Test n Subsyste Functional m Design Test M Module Module test control Design Test Module Implementation Ethernet IPG Xpack 4 vehicle model environment model driver model drivetrain model CAN CAN CAN ETAS ES910 Engine Controller CarPC EeDA software torque distribution digital road data safety functions 20 23.09.2016 Dipl. Ing. Björn Fath und Dipl.-Inform. Dominik Dörr Institute of vehicle system technology
HIL Test – tests and test track Require System ments Test Analy sis Syste m Integration Desig Test n Basic functionality tests with IPG Testmanager Subsyste Functional m Design Test M Module Module Design Test activation/deactivation of EeDA in different scenarios Module Implementation safety functions of engine controller Import of real test track into CarMaker 21 23.09.2016 Dipl. Ing. Björn Fath und Dipl.-Inform. Dominik Dörr Institute of vehicle system technology
Process of testing – vehicle test Requirements System Test Analysis Integration System Design Test Subsystem Functional Design Test Module Module Design Test Module Implementation 22 23.09.2016 Dipl. Ing. Björn Fath und Dipl.-Inform. Dominik Dörr Institute of vehicle system technology
vehicle test - Overview Requirements System Analy Test sis Integr System ation Design Test Software was tested in the car using an ETAS ES910 Functio Subsystem nal Design Test Modul Module e Design Test Module Implementation Works like espected with very little application effort Driver Advices in the car 23 23.09.2016 Dipl. Ing. Björn Fath und Dipl.-Inform. Dominik Dörr Institute of vehicle system technology
Recommend
More recommend
Unleash a World of Digital Possibilities—Browse, Share, and Explore Content Without Boundaries