AN INTRODUCTION TO SYSTEM-THEORETIC METHODS FOR MODEL REDUCTION - PowerPoint PPT Presentation
AN INTRODUCTION TO SYSTEM-THEORETIC METHODS FOR MODEL REDUCTION Part V: Balancing-based Methods for Nonlinear Systems Peter Benner Pawan K. Goyal Igor Pontes Duff Tobias Breiten (KFU Graz TU Berlin) Tobias Damm (TU Kaiserslautern) Special
How general are these system classes? Carleman Bilinearization Consider smooth nonlinear, control-affine system with m = 1: x = A ( x ) + Bu ˙ with A (0) = 0 . Taylor expansion of state equation about x = 0 yields x = Ax + H ( x ⊗ x ) + . . . + Bu . ˙ Instead of truncating Taylor expansion, Carleman (bi)linearization takes into account z := x (2) = x ⊗ x . K = 2 higher order terms (h.o.t.) by introducing new variables: Then z satisfies z = ˙ ˙ x ⊗ x + x ⊗ ˙ x = ( Ax + Hz + . . . + Bu ) ⊗ x + x ⊗ ( Ax + Hz + . . . + Bu ) . ➞ Peter Benner, benner@mpi-magdeburg.mpg.de Balancing-based Model Order Reduction for Nonlinear Systems 7/46
How general are these system classes? Carleman Bilinearization Consider smooth nonlinear, control-affine system with m = 1: x = A ( x ) + Bu ˙ with A (0) = 0 , y = Cx + Du . Instead of truncating Taylor expansion, Carleman (bi)linearization takes into account z := x (2) = x ⊗ x . K = 2 higher order terms (h.o.t.) by introducing new variables: Then z satisfies z = ˙ ˙ x ⊗ x + x ⊗ ˙ x = ( Ax + Hz + . . . + Bu ) ⊗ x + x ⊗ ( Ax + Hz + . . . + Bu ) . � x T , z T � T ∈ R n + n 2 : ⇒ bilinear system with state x ⊗ := Ignoring h.o.t. = � A � � � � B � d H 0 0 dt x ⊗ = x ⊗ + ( x ⊗ ) u + u , 0 A ⊗ I n + I n ⊗ A B ⊗ I n + I n ⊗ B 0 0 � � y ⊗ = x ⊗ + Du . 0 C ➞ Peter Benner, benner@mpi-magdeburg.mpg.de Balancing-based Model Order Reduction for Nonlinear Systems 7/46
How general are these system classes? Carleman Bilinearization Consider smooth nonlinear, control-affine system with m = 1: x = A ( x ) + Bu ˙ with A (0) = 0 , y = Cx + Du . Instead of truncating Taylor expansion, Carleman (bi)linearization takes into account z := x (2) = x ⊗ x . K = 2 higher order terms (h.o.t.) by introducing new variables: Then z satisfies z = ˙ ˙ x ⊗ x + x ⊗ ˙ x = ( Ax + Hz + . . . + Bu ) ⊗ x + x ⊗ ( Ax + Hz + . . . + Bu ) . � x T , z T � T ∈ R n + n 2 : ⇒ bilinear system with state x ⊗ := Ignoring h.o.t. = � A � � � � B � d H 0 0 dt x ⊗ = x ⊗ + ( x ⊗ ) u + u , 0 A ⊗ I n + I n ⊗ A B ⊗ I n + I n ⊗ B 0 0 � � y ⊗ = x ⊗ + Du . 0 C Remark Bilinear systems directly occur, e.g., in biological systems, PDE control problems with mixed boundary conditions, ”control via coefficients”, networked control systems, . . . ➞ Peter Benner, benner@mpi-magdeburg.mpg.de Balancing-based Model Order Reduction for Nonlinear Systems 7/46
How general are these system classes? Quadratic-Bilinearization QB systems can be obtained as approximation (by truncating Taylor expansion) to weakly nonlinear systems [ Phillips ’03 ] . C. Gu. QLMOR: A Projection-Based Nonlinear Model Order Reduction Approach Using Quadratic-Linear Representation of Nonlinear Systems. IEEE Transactions on Computer-Aided Design of Integrated Circuits and Systems, 30(9):1307–1320, 2011. L. Feng, X. Zeng, C. Chiang, D. Zhou, and Q. Fang. Direct nonlinear order reduction with variational analysis. In: Proceedings of DATE 2004, pp. 1316-1321. J. R. Phillips. Projection-based approaches for model reduction of weakly nonlinear time-varying systems. IEEE Transactions on Computer-Aided Design of Integrated Circuits and Systems, 22(2):171-187, 2003. ➞ Peter Benner, benner@mpi-magdeburg.mpg.de Balancing-based Model Order Reduction for Nonlinear Systems 8/46
How general are these system classes? Quadratic-Bilinearization QB systems can be obtained as approximation (by truncating Taylor expansion) to weakly nonlinear systems [ Phillips ’03 ] . But exact representation of smooth nonlinear systems possible: Theorem [ Gu ’09/’11 ] Assume that the state equation of a nonlinear system is given by x = a 0 x + a 1 g 1 ( x ) + . . . + a k g k ( x ) + Bu , ˙ where g i ( x ) : R n → R n are compositions of uni-variable rational, exponential, logarithmic, trigonometric or root functions, respectively. Then, by iteratively taking derivatives and adding algebraic equations, respectively, the nonlinear system can be transformed into a QB(DAE) system. C. Gu. QLMOR: A Projection-Based Nonlinear Model Order Reduction Approach Using Quadratic-Linear Representation of Nonlinear Systems. IEEE Transactions on Computer-Aided Design of Integrated Circuits and Systems, 30(9):1307–1320, 2011. L. Feng, X. Zeng, C. Chiang, D. Zhou, and Q. Fang. Direct nonlinear order reduction with variational analysis. In: Proceedings of DATE 2004, pp. 1316-1321. J. R. Phillips. Projection-based approaches for model reduction of weakly nonlinear time-varying systems. IEEE Transactions on Computer-Aided Design of Integrated Circuits and Systems, 22(2):171-187, 2003. ➞ Peter Benner, benner@mpi-magdeburg.mpg.de Balancing-based Model Order Reduction for Nonlinear Systems 8/46
How general are these system classes? Quadratic-Bilinearization QB systems can be obtained as approximation (by truncating Taylor expansion) to weakly nonlinear systems [ Phillips ’03 ] . But exact representation of smooth nonlinear systems possible: Theorem [ Gu ’09/’11 ] Assume that the state equation of a nonlinear system is given by x = a 0 x + a 1 g 1 ( x ) + . . . + a k g k ( x ) + Bu , ˙ where g i ( x ) : R n → R n are compositions of uni-variable rational, exponential, logarithmic, trigonometric or root functions, respectively. Then, by iteratively taking derivatives and adding algebraic equations, respectively, the nonlinear system can be transformed into a QB(DAE) system. Alternatively, polynomial-bilinear system can be obtained using iterated Lie brackets [ Gu ’11 ] . C. Gu. QLMOR: A Projection-Based Nonlinear Model Order Reduction Approach Using Quadratic-Linear Representation of Nonlinear Systems. IEEE Transactions on Computer-Aided Design of Integrated Circuits and Systems, 30(9):1307–1320, 2011. L. Feng, X. Zeng, C. Chiang, D. Zhou, and Q. Fang. Direct nonlinear order reduction with variational analysis. In: Proceedings of DATE 2004, pp. 1316-1321. J. R. Phillips. Projection-based approaches for model reduction of weakly nonlinear time-varying systems. IEEE Transactions on Computer-Aided Design of Integrated Circuits and Systems, 22(2):171-187, 2003. ➞ Peter Benner, benner@mpi-magdeburg.mpg.de Balancing-based Model Order Reduction for Nonlinear Systems 8/46
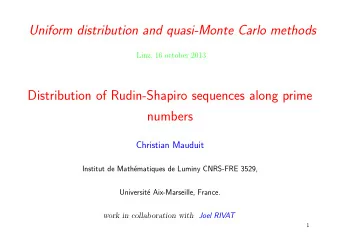
Some QB-transformable Systems FitzHugh-Nagumo model Sine-Gordon equation 0 . 1 0 . 2 5 · 10 − 2 w 0 . 1 0 v 0 − 5 · 10 − 2 1 0 . 2 0 . 1 0 − 0 . 1 0 v 0 0 . 2 0 . 4 0 . 6 0 . 8 1 x length Model describes activation and Applications in biomedical studies, de-activation of neurons. mechanical transmission lines, etc. Contains a cubic nonlinearity, Contains sin function, which can which can be transformed to QB also be rewritten into QB form. form. ➞ Peter Benner, benner@mpi-magdeburg.mpg.de Balancing-based Model Order Reduction for Nonlinear Systems 9/46
Linear Systems and their Transfer Functions Transfer functions of linear systems Linear Systems in Frequency Domain Application of Laplace transform ( x ( t ) �→ x ( s ), ˙ x ( t ) �→ sx ( s ) − x (0)) to linear system x ( t ) = Ax ( t ) + Bu ( t ) , ˙ y ( t ) = Cx ( t ) + Du ( t ) with x (0) = 0 yields: sx ( s ) = Ax ( s ) + Bu ( s ) , y ( s ) = Cx ( s ) + Du ( s ) , Model reduction in frequency domain: Fast evaluation of mapping u → y . ➞ Peter Benner, benner@mpi-magdeburg.mpg.de Balancing-based Model Order Reduction for Nonlinear Systems 10/46
Linear Systems and their Transfer Functions Transfer functions of linear systems Linear Systems in Frequency Domain Application of Laplace transform ( x ( t ) �→ x ( s ), ˙ x ( t ) �→ sx ( s ) − x (0)) to linear system x ( t ) = Ax ( t ) + Bu ( t ) , ˙ y ( t ) = Cx ( t ) + Du ( t ) with x (0) = 0 yields: sx ( s ) = Ax ( s ) + Bu ( s ) , y ( s ) = Cx ( s ) + Du ( s ) , = ⇒ I/O-relation in frequency domain: � � C ( sI n − A ) − 1 B + D y ( s ) = u ( s ) . � �� � =: G ( s ) G ( s ) is the transfer function of Σ. Model reduction in frequency domain: Fast evaluation of mapping u → y . ➞ Peter Benner, benner@mpi-magdeburg.mpg.de Balancing-based Model Order Reduction for Nonlinear Systems 10/46
Linear Systems and their Transfer Functions Transfer functions of linear systems Formulating model reduction in frequency domain Approximate the dynamical system A ∈ R n × n , B ∈ R n × m , x ˙ = Ax + Bu , C ∈ R q × n , D ∈ R q × m , y = Cx + Du , by reduced-order system ˙ ˆ x + ˆ A ∈ R r × r , ˆ ˆ B ∈ R r × m , x ˆ = A ˆ Bu , ˆ x + ˆ C ∈ R q × r , ˆ ˆ D ∈ R q × m y ˆ = C ˆ Du , of order r ≪ n , such that � � � � � Gu − ˆ � G − ˆ � � � � � y − ˆ y � = Gu � ≤ G � · � u � < tolerance · � u � . ➞ Peter Benner, benner@mpi-magdeburg.mpg.de Balancing-based Model Order Reduction for Nonlinear Systems 10/46
Linear Systems and their Transfer Functions Formulating model reduction in frequency domain Approximate the dynamical system A ∈ R n × n , B ∈ R n × m , x ˙ = Ax + Bu , C ∈ R q × n , D ∈ R q × m , y = Cx + Du , by reduced-order system ˙ ˆ x + ˆ A ∈ R r × r , ˆ ˆ B ∈ R r × m , x ˆ = A ˆ Bu , ˆ x + ˆ C ∈ R q × r , ˆ ˆ D ∈ R q × m y ˆ = C ˆ Du , of order r ≪ n , such that � � � � � Gu − ˆ � G − ˆ � � � � � y − ˆ y � = Gu � ≤ G � · � u � < tolerance · � u � . � � � G − ˆ � � = ⇒ Approximation problem: min G � . order ( ˆ G ) ≤ r ➞ Peter Benner, benner@mpi-magdeburg.mpg.de Balancing-based Model Order Reduction for Nonlinear Systems 10/46
Outline 1. Introduction 2. Gramian-based Model Reduction for Linear Systems 3. Balanced Truncation for Bilinear Systems 4. Balanced Truncation for QB Systems 5. Balanced Truncation for Polynomial Systems ➞ Peter Benner, benner@mpi-magdeburg.mpg.de Balancing-based Model Order Reduction for Nonlinear Systems 11/46
Recap: Balanced Truncation for Linear Systems Basic concept � x ( t ) = Ax ( t ) + Bu ( t ) , ˙ with A stable, i.e., Λ ( A ) ⊂ C − , System Σ : y ( t ) = Cx ( t ) , is balanced, if system Gramians, i.e., solutions P , Q of the Lyapunov equations AP + PA T + BB T = 0 , A T Q + QA + C T C = 0 , satisfy: P = Q = diag ( σ 1 , . . . , σ n ) with σ 1 ≥ σ 2 ≥ . . . ≥ σ n > 0 . ➞ Peter Benner, benner@mpi-magdeburg.mpg.de Balancing-based Model Order Reduction for Nonlinear Systems 12/46
Recap: Balanced Truncation for Linear Systems Basic concept � x ( t ) = Ax ( t ) + Bu ( t ) , ˙ with A stable, i.e., Λ ( A ) ⊂ C − , System Σ : y ( t ) = Cx ( t ) , is balanced, if system Gramians, i.e., solutions P , Q of the Lyapunov equations AP + PA T + BB T = 0 , A T Q + QA + C T C = 0 , satisfy: P = Q = diag ( σ 1 , . . . , σ n ) with σ 1 ≥ σ 2 ≥ . . . ≥ σ n > 0 . { σ 1 , . . . , σ n } are the Hankel singular values (HSVs) of Σ. ➞ Peter Benner, benner@mpi-magdeburg.mpg.de Balancing-based Model Order Reduction for Nonlinear Systems 12/46
Recap: Balanced Truncation for Linear Systems Basic concept � x ( t ) = Ax ( t ) + Bu ( t ) , ˙ with A stable, i.e., Λ ( A ) ⊂ C − , System Σ : y ( t ) = Cx ( t ) , is balanced, if system Gramians, i.e., solutions P , Q of the Lyapunov equations AP + PA T + BB T = 0 , A T Q + QA + C T C = 0 , satisfy: P = Q = diag ( σ 1 , . . . , σ n ) with σ 1 ≥ σ 2 ≥ . . . ≥ σ n > 0 . { σ 1 , . . . , σ n } are the Hankel singular values (HSVs) of Σ. Compute balanced realization (needs P , Q !) of the system via state-space transformation ( TAT − 1 , TB , CT − 1 ) T : ( A , B , C ) �→ �� A 11 � � B 1 � �� � A 12 = , , C 1 C 2 . A 21 A 22 B 2 ➞ Peter Benner, benner@mpi-magdeburg.mpg.de Balancing-based Model Order Reduction for Nonlinear Systems 12/46
Recap: Balanced Truncation for Linear Systems Basic concept � x ( t ) = Ax ( t ) + Bu ( t ) , ˙ with A stable, i.e., Λ ( A ) ⊂ C − , System Σ : y ( t ) = Cx ( t ) , is balanced, if system Gramians, i.e., solutions P , Q of the Lyapunov equations AP + PA T + BB T = 0 , A T Q + QA + C T C = 0 , satisfy: P = Q = diag ( σ 1 , . . . , σ n ) with σ 1 ≥ σ 2 ≥ . . . ≥ σ n > 0 . { σ 1 , . . . , σ n } are the Hankel singular values (HSVs) of Σ. Compute balanced realization (needs P , Q !) of the system via state-space transformation ( TAT − 1 , TB , CT − 1 ) T : ( A , B , C ) �→ �� A 11 � � B 1 � �� � A 12 = , , C 1 C 2 . A 21 A 22 B 2 Truncation � ( ˆ A , ˆ B , ˆ C ) = ( A 11 , B 1 , C 1 ). ➞ Peter Benner, benner@mpi-magdeburg.mpg.de Balancing-based Model Order Reduction for Nonlinear Systems 12/46
Recap: Balanced Truncation for Linear Systems Motivation: HSV are system invariants: they are preserved under T and determine the energy transfer given by the Hankel map H : L 2 ( −∞ , 0) �→ L 2 (0 , ∞ ) : u − �→ y + . ”functional analyst’s point of view” ➞ Peter Benner, benner@mpi-magdeburg.mpg.de Balancing-based Model Order Reduction for Nonlinear Systems 12/46
Recap: Balanced Truncation for Linear Systems Motivation: HSV are system invariants: they are preserved under T and determine the energy transfer given by the Hankel map H : L 2 ( −∞ , 0) �→ L 2 (0 , ∞ ) : u − �→ y + . ”functional analyst’s point of view” Minimum energy to reach x 0 in balanced coordinates: � 0 n � 1 u ( t ) T u ( t ) dt = x T 0 P − 1 x 0 = σ j x 2 inf 0 , j u ∈ L 2( −∞ , 0] −∞ j =1 x (0)= x 0 ➞ Peter Benner, benner@mpi-magdeburg.mpg.de Balancing-based Model Order Reduction for Nonlinear Systems 12/46
Recap: Balanced Truncation for Linear Systems Motivation: HSV are system invariants: they are preserved under T and determine the energy transfer given by the Hankel map H : L 2 ( −∞ , 0) �→ L 2 (0 , ∞ ) : u − �→ y + . ”functional analyst’s point of view” Minimum energy to reach x 0 in balanced coordinates: � 0 n � 1 u ( t ) T u ( t ) dt = x T 0 P − 1 x 0 = σ j x 2 inf 0 , j u ∈ L 2( −∞ , 0] −∞ j =1 x (0)= x 0 Energy contained in the system if x (0) = x 0 and u ( t ) ≡ 0 in balanced coordinates: � ∞ n � � y � 2 y ( t ) T y ( t ) dt = x T σ j x 2 2 = 0 Qx 0 = 0 , j 0 j =1 ➞ Peter Benner, benner@mpi-magdeburg.mpg.de Balancing-based Model Order Reduction for Nonlinear Systems 12/46
Recap: Balanced Truncation for Linear Systems Motivation: HSV are system invariants: they are preserved under T and determine the energy transfer given by the Hankel map H : L 2 ( −∞ , 0) �→ L 2 (0 , ∞ ) : u − �→ y + . ”functional analyst’s point of view” In balanced coordinates, energy transfer from u − to y + is ∞ � y ( t ) T y ( t ) dt n 1 � 0 σ 2 j x 2 E := sup = 0 , j . 0 � x 0 � 2 � u ∈ L 2( −∞ , 0] u ( t ) T u ( t ) dt j =1 x (0)= x 0 −∞ ”engineer’s point of view” ➞ Peter Benner, benner@mpi-magdeburg.mpg.de Balancing-based Model Order Reduction for Nonlinear Systems 12/46
Recap: Balanced Truncation for Linear Systems Motivation: HSV are system invariants: they are preserved under T and determine the energy transfer given by the Hankel map H : L 2 ( −∞ , 0) �→ L 2 (0 , ∞ ) : u − �→ y + . ”functional analyst’s point of view” In balanced coordinates, energy transfer from u − to y + is ∞ � y ( t ) T y ( t ) dt n 1 � 0 σ 2 j x 2 E := sup = 0 , j . 0 � x 0 � 2 � u ∈ L 2( −∞ , 0] u ( t ) T u ( t ) dt j =1 x (0)= x 0 −∞ ”engineer’s point of view” = ⇒ Truncate states corresponding to “small” HSVs ➞ Peter Benner, benner@mpi-magdeburg.mpg.de Balancing-based Model Order Reduction for Nonlinear Systems 12/46
Recap: Balanced Truncation for Linear Systems Properties Reduced-order model is stable with HSVs σ 1 , . . . , σ r . ➞ Peter Benner, benner@mpi-magdeburg.mpg.de Balancing-based Model Order Reduction for Nonlinear Systems 12/46
Recap: Balanced Truncation for Linear Systems Properties Reduced-order model is stable with HSVs σ 1 , . . . , σ r . Adaptive choice of r via computable error bound: � � � n y � 2 ≤ � G − ˆ � y − ˆ G � H ∞ � u � 2 ≤ 2 � u � 2 . k = r +1 σ k ➞ Peter Benner, benner@mpi-magdeburg.mpg.de Balancing-based Model Order Reduction for Nonlinear Systems 12/46
Recap: Balanced Truncation for Linear Systems Properties Reduced-order model is stable with HSVs σ 1 , . . . , σ r . Adaptive choice of r via computable error bound: � � � n y � 2 ≤ � G − ˆ � y − ˆ G � H ∞ � u � 2 ≤ 2 � u � 2 . k = r +1 σ k Practical implementation Rather than solving Lyapunov equations for P , Q ( n 2 unknowns!), find S , R ∈ R n × s with s ≪ n such that P ≈ SS T , Q ≈ RR T . Reduced-order model directly obtained via small-scale ( s × s ) SVD of R T S ! No O ( n 3 ) or O ( n 2 ) computations necessary! ➞ Peter Benner, benner@mpi-magdeburg.mpg.de Balancing-based Model Order Reduction for Nonlinear Systems 12/46
Balanced Truncation for Bilinear Systems The concept of balanced truncation can be generalized to the class of bilinear systems, where we need the solutions of the Lyapunov-plus-positive equations: m � AP + PA T + i + BB T = 0 , A i PA T i =1 m � A T Q + QA T + A T i QA i + C T C = 0 . i =1 ➞ Peter Benner, benner@mpi-magdeburg.mpg.de Balancing-based Model Order Reduction for Nonlinear Systems 13/46
Balanced Truncation for Bilinear Systems The concept of balanced truncation can be generalized to the class of bilinear systems, where we need the solutions of the Lyapunov-plus-positive equations: m � AP + PA T + i + BB T = 0 , A i PA T i =1 m � A T Q + QA T + A T i QA i + C T C = 0 . i =1 If unique solutions P = P T ≥ 0, Q = Q T ≥ 0 exist, these can be used in balancing procedure like for linear systems, with A := W T AV , ˆ A i = W T A i V , ˆ B := W T B , ˆ ˆ C := CV . See [ Al-Baiyat/Bettayeb 1993, B./Damm 2011 ] for details. ➞ Peter Benner, benner@mpi-magdeburg.mpg.de Balancing-based Model Order Reduction for Nonlinear Systems 13/46
Balanced Truncation for Bilinear Systems The concept of balanced truncation can be generalized to the class of bilinear systems, where we need the solutions of the Lyapunov-plus-positive equations: m � AP + PA T + i + BB T = 0 , A i PA T i =1 m � A T Q + QA T + A T i QA i + C T C = 0 . i =1 If unique solutions P = P T ≥ 0, Q = Q T ≥ 0 exist, these can be used in balancing procedure like for linear systems, with A := W T AV , ˆ A i = W T A i V , ˆ B := W T B , ˆ ˆ C := CV . See [ Al-Baiyat/Bettayeb 1993, B./Damm 2011 ] for details. Stability preservation [ B./Damm/Redmann/Rodriguez Cruz 2016 ] . ➞ Peter Benner, benner@mpi-magdeburg.mpg.de Balancing-based Model Order Reduction for Nonlinear Systems 13/46
Balanced Truncation for Bilinear Systems The concept of balanced truncation can be generalized to the class of bilinear systems, where we need the solutions of the Lyapunov-plus-positive equations: m � AP + PA T + i + BB T = 0 , A i PA T i =1 m � A T Q + QA T + A T i QA i + C T C = 0 . i =1 If unique solutions P = P T ≥ 0, Q = Q T ≥ 0 exist, these can be used in balancing procedure like for linear systems, with A := W T AV , ˆ A i = W T A i V , ˆ B := W T B , ˆ ˆ C := CV . See [ Al-Baiyat/Bettayeb 1993, B./Damm 2011 ] for details. Stability preservation [ B./Damm/Redmann/Rodriguez Cruz 2016 ] . These equations also appear for stochastic control systems, see [B./Damm 2011] . ➞ Peter Benner, benner@mpi-magdeburg.mpg.de Balancing-based Model Order Reduction for Nonlinear Systems 13/46
Balanced Truncation for Bilinear Systems The concept of balanced truncation can be generalized to the class of bilinear systems, where we need the solutions of the Lyapunov-plus-positive equations: m � AP + PA T + i + BB T = 0 , A i PA T i =1 m � A T Q + QA T + A T i QA i + C T C = 0 . i =1 If unique solutions P = P T ≥ 0, Q = Q T ≥ 0 exist, these can be used in balancing procedure like for linear systems, with A := W T AV , ˆ A i = W T A i V , ˆ B := W T B , ˆ ˆ C := CV . See [ Al-Baiyat/Bettayeb 1993, B./Damm 2011 ] for details. Stability preservation [ B./Damm/Redmann/Rodriguez Cruz 2016 ] . These equations also appear for stochastic control systems, see [B./Damm 2011] . ”Twice-the-trail-of-the-HSVs” error bound does not hold [B./Damm 2014] . ➞ Peter Benner, benner@mpi-magdeburg.mpg.de Balancing-based Model Order Reduction for Nonlinear Systems 13/46
Balanced Truncation for Bilinear Systems The concept of balanced truncation can be generalized to the class of bilinear systems, where we need the solutions of the Lyapunov-plus-positive equations: m � AP + PA T + i + BB T = 0 , A i PA T i =1 m � A T Q + QA T + A T i QA i + C T C = 0 . i =1 If unique solutions P = P T ≥ 0, Q = Q T ≥ 0 exist, these can be used in balancing procedure like for linear systems, with A := W T AV , ˆ A i = W T A i V , ˆ B := W T B , ˆ ˆ C := CV . See [ Al-Baiyat/Bettayeb 1993, B./Damm 2011 ] for details. Stability preservation [ B./Damm/Redmann/Rodriguez Cruz 2016 ] . These equations also appear for stochastic control systems, see [B./Damm 2011] . ”Twice-the-trail-of-the-HSVs” error bound does not hold [B./Damm 2014] . Alternative Gramians based on linear matrix inequalities investigated by [ Redmann 2018 ] , yield H ∞ error bound based on truncated characteristic values, but hard to compute for large-scale systems! ➞ Peter Benner, benner@mpi-magdeburg.mpg.de Balancing-based Model Order Reduction for Nonlinear Systems 13/46
Lyapunov-plus-Positive Equations Some basic facts and assumptions m � AX + XA T + i + BB T = 0 . A i XA T (1) i =1 Need a positive semi-definite symmetric solution X . ➞ Peter Benner, benner@mpi-magdeburg.mpg.de Balancing-based Model Order Reduction for Nonlinear Systems 14/46
Lyapunov-plus-Positive Equations Some basic facts and assumptions m � AX + XA T + i + BB T = 0 . A i XA T (1) i =1 Need a positive semi-definite symmetric solution X . In standard Lyapunov case, existence and uniqueness guaranteed if A stable (Λ ( A ) ⊂ C − ); this is not sufficient here: (1) is equivalent to � m � � vec( X ) = − vec( BB T ) . I n ⊗ A + A ⊗ I n + A i ⊗ A i i =1 Sufficient condition for unique solvability: smallness of A i (related to stability radius of A ). � bounded-input bounded-output (BIBO) stability of bilinear systems. This will be assumed from here on, hence: existence and uniqueness of positive semi-definite solution X = X T . ➞ Peter Benner, benner@mpi-magdeburg.mpg.de Balancing-based Model Order Reduction for Nonlinear Systems 14/46
Lyapunov-plus-Positive Equations Some basic facts and assumptions m � AX + XA T + i + BB T = 0 . A i XA T (1) i =1 Need a positive semi-definite symmetric solution X . In standard Lyapunov case, existence and uniqueness guaranteed if A stable (Λ ( A ) ⊂ C − ); this is not sufficient here: (1) is equivalent to � m � � vec( X ) = − vec( BB T ) . I n ⊗ A + A ⊗ I n + A i ⊗ A i i =1 Sufficient condition for unique solvability: smallness of A i (related to stability radius of A ). � bounded-input bounded-output (BIBO) stability of bilinear systems. This will be assumed from here on, hence: existence and uniqueness of positive semi-definite solution X = X T . Want: solution methods for large scale problems, i.e., only matrix-matrix multiplication with A , A j , solves with (shifted) A allowed! ➞ Peter Benner, benner@mpi-magdeburg.mpg.de Balancing-based Model Order Reduction for Nonlinear Systems 14/46
Lyapunov-plus-Positive Equations Some basic facts and assumptions m � AX + XA T + i + BB T = 0 . A i XA T (1) i =1 Need a positive semi-definite symmetric solution X . In standard Lyapunov case, existence and uniqueness guaranteed if A stable (Λ ( A ) ⊂ C − ); this is not sufficient here: (1) is equivalent to � m � � vec( X ) = − vec( BB T ) . I n ⊗ A + A ⊗ I n + A i ⊗ A i i =1 Sufficient condition for unique solvability: smallness of A i (related to stability radius of A ). � bounded-input bounded-output (BIBO) stability of bilinear systems. This will be assumed from here on, hence: existence and uniqueness of positive semi-definite solution X = X T . Want: solution methods for large scale problems, i.e., only matrix-matrix multiplication with A , A j , solves with (shifted) A allowed! Requires to compute data-sparse approximation to generally dense X ; here: X ≈ ZZ T with Z ∈ R n × n Z , n Z ≪ n ! ➞ Peter Benner, benner@mpi-magdeburg.mpg.de Balancing-based Model Order Reduction for Nonlinear Systems 14/46
Lyapunov-plus-Positive Equations Low-rank Approximations Question Can we expect low-rank approximations ZZ T ≈ X to the solution of m � AX + XA T + j + BB T = 0 ? A j XA T j =1 ➞ Peter Benner, benner@mpi-magdeburg.mpg.de Balancing-based Model Order Reduction for Nonlinear Systems 15/46
Lyapunov-plus-Positive Equations Low-rank Approximations Question Can we expect low-rank approximations ZZ T ≈ X to the solution of m � AX + XA T + j + BB T = 0 ? A j XA T j =1 Standard Lyapunov case: [ Grasedyck ’04 ] AX + XA T + BB T = 0 ⇐ vec( X ) = − vec( BB T ) . ⇒ ( I n ⊗ A + A ⊗ I n ) � �� � =: A ➞ Peter Benner, benner@mpi-magdeburg.mpg.de Balancing-based Model Order Reduction for Nonlinear Systems 15/46
Lyapunov-plus-Positive Equations Low-rank Approximations Standard Lyapunov case: [ Grasedyck ’04 ] AX + XA T + BB T = 0 ⇐ vec( X ) = − vec( BB T ) . ⇒ ( I n ⊗ A + A ⊗ I n ) � �� � =: A Apply � ∞ M − 1 = − exp( tM ) d t 0 to A and approximate the integral via (sinc) quadrature ⇒ k � A − 1 ≈ − ω i exp( t k A ) , i = − k √ k ) (exp( − k ) if A = A T ), then an approximate Lyapunov solution is with error ∼ exp( − given by k � ω i exp( t i A ) vec( BB T ) . vec( X ) ≈ vec( X k ) = i = − k ➞ Peter Benner, benner@mpi-magdeburg.mpg.de Balancing-based Model Order Reduction for Nonlinear Systems 15/46
Lyapunov-plus-Positive Equations Low-rank Approximations Standard Lyapunov case: [ Grasedyck ’04 ] AX + XA T + BB T = 0 ⇐ vec( X ) = − vec( BB T ) . ⇒ ( I n ⊗ A + A ⊗ I n ) � �� � =: A � k ω i exp( t i A ) vec( BB T ) . vec( X ) ≈ vec( X k ) = i = − k Now observe that exp( t i A ) = exp ( t i ( I n ⊗ A + A ⊗ I n )) ≡ exp( t i A ) ⊗ exp( t i A ) . ➞ Peter Benner, benner@mpi-magdeburg.mpg.de Balancing-based Model Order Reduction for Nonlinear Systems 15/46
Lyapunov-plus-Positive Equations Low-rank Approximations Standard Lyapunov case: [ Grasedyck ’04 ] AX + XA T + BB T = 0 ⇐ vec( X ) = − vec( BB T ) . ⇒ ( I n ⊗ A + A ⊗ I n ) � �� � =: A � k ω i exp( t i A ) vec( BB T ) . vec( X ) ≈ vec( X k ) = i = − k Now observe that exp( t i A ) = exp ( t i ( I n ⊗ A + A ⊗ I n )) ≡ exp( t i A ) ⊗ exp( t i A ) . Hence, k � ω i (exp( t i A ) ⊗ exp( t i A )) vec( BB T ) vec( X k ) = i = − k ➞ Peter Benner, benner@mpi-magdeburg.mpg.de Balancing-based Model Order Reduction for Nonlinear Systems 15/46
Lyapunov-plus-Positive Equations Low-rank Approximations Standard Lyapunov case: [ Grasedyck ’04 ] AX + XA T + BB T = 0 ⇐ vec( X ) = − vec( BB T ) . ⇒ ( I n ⊗ A + A ⊗ I n ) � �� � =: A Hence, k � ω i (exp( t i A ) ⊗ exp( t i A )) vec( BB T ) vec( X k ) = i = − k k k � � ω i exp( t i A ) BB T exp( t i A T ) ≡ ω i B i B T = ⇒ X k = i , i = − k i = − k so that rank( X k ) ≤ (2 k + 1) m with √ ( exp( − k ) for A = A T )! � X − X k � 2 � exp( − k ) ➞ Peter Benner, benner@mpi-magdeburg.mpg.de Balancing-based Model Order Reduction for Nonlinear Systems 15/46
Lyapunov-plus-Positive Equations Low-rank Approximations Question Can we expect low-rank approximations ZZ T ≈ X to the solution of m � AX + XA T + j + BB T = 0 ? A j XA T j =1 Problem: in general, m m � � = � exp t i ( I ⊗ A + A ⊗ I + A j ⊗ A j ) (exp ( t i A ) ⊗ exp ( t i A )) exp t i ( A j ⊗ A j ) . j =1 j =1 ➞ Peter Benner, benner@mpi-magdeburg.mpg.de Balancing-based Model Order Reduction for Nonlinear Systems 15/46
Lyapunov-plus-Positive Equations Low-rank Approximations Question Can we expect low-rank approximations ZZ T ≈ X to the solution of m � AX + XA T + j + BB T = 0 ? A j XA T j =1 Assume that m = 1 and A 1 = UV T with U , V ∈ R n × r and consider + UV T ⊗ UV T ) vec( X ) = − vec( BB T ) ( I n ⊗ A + A ⊗ I n � �� � � �� � = A =: y � A + ( U ⊗ U )( V ⊗ V ) T � ⇐ ⇒ vec( X ) = y . ➞ Peter Benner, benner@mpi-magdeburg.mpg.de Balancing-based Model Order Reduction for Nonlinear Systems 15/46
Lyapunov-plus-Positive Equations Low-rank Approximations Question Can we expect low-rank approximations ZZ T ≈ X to the solution of m � AX + XA T + j + BB T = 0 ? A j XA T j =1 Assume that m = 1 and A 1 = UV T with U , V ∈ R n × r and consider + UV T ⊗ UV T ) vec( X ) = − vec( BB T ) ( I n ⊗ A + A ⊗ I n � �� � � �� � = A =: y � A + ( U ⊗ U )( V ⊗ V ) T � ⇐ ⇒ vec( X ) = y . Sherman-Morrison-Woodbury = ⇒ � � I r ⊗ I r − ( V ⊗ V ) T A − 1 ( U ⊗ U ) ( V ⊗ V ) T A − 1 y A vec( X ) = y + ( U ⊗ U ) . � �� � =: w ➞ Peter Benner, benner@mpi-magdeburg.mpg.de Balancing-based Model Order Reduction for Nonlinear Systems 15/46
Lyapunov-plus-Positive Equations Low-rank Approximations Question Can we expect low-rank approximations ZZ T ≈ X to the solution of m � AX + XA T + j + BB T = 0 ? A j XA T j =1 Assume that m = 1 and A 1 = UV T with U , V ∈ R n × r and consider + UV T ⊗ UV T ) vec( X ) = − vec( BB T ) ( I n ⊗ A + A ⊗ I n � �� � � �� � = A =: y � A + ( U ⊗ U )( V ⊗ V ) T � ⇐ ⇒ vec( X ) = y . Sherman-Morrison-Woodbury = ⇒ � � I r ⊗ I r − ( V ⊗ V ) T A − 1 ( U ⊗ U ) ( V ⊗ V ) T A − 1 y A vec( X ) = y + ( U ⊗ U ) . � �� � =: w Matrix rank of RHS − BB T − U vec − 1 ( w ) U T is ≤ r + 1! � Apply results for linear Lyapunov equations with r.h.s of rank r + 1. ➞ Peter Benner, benner@mpi-magdeburg.mpg.de Balancing-based Model Order Reduction for Nonlinear Systems 15/46
Lyapunov-plus-Positive Equations Low-rank Approximations Theorem [B./Breiten 2012] Assume existence and uniqueness with stable A and A j = U j V T j , with U j , V j ∈ R n × r j . Set r = � m j =1 r j . Then the solution X of m � AX + XA T + j + BB T = 0 A j XA T j =1 can be approximated by X k of rank (2 k + 1)( m + r ), with an error satisfying √ � X − X k � 2 � exp( − k ) . ➞ Peter Benner, benner@mpi-magdeburg.mpg.de Balancing-based Model Order Reduction for Nonlinear Systems 16/46
Lyapunov-plus-Positive Equations Numerical Methods Generalized Alternating Directions Iteration (ADI) method. 1. Computing square solution matrix ( ∼ n 2 unknowns) [ Damm 2008] . 2. Computing low-rank factors of solutions ( ∼ n unknowns) [ B./Breiten 2013 ] . Generalized Extended (or Rational) Krylov Subspace Method (EKSM/RKSM) [ B./Breiten 2013 ] . Tensorized versions of standard Krylov subspace methods, e.g., PCG, PBiCGStab [ Kressner/Tobler 2011, B./Breiten 2013 ] . Inexact stationary (fix point) iteration [ Shank/Simoncini/Szyld 2016 ] . ➞ Peter Benner, benner@mpi-magdeburg.mpg.de Balancing-based Model Order Reduction for Nonlinear Systems 17/46
Parametric Systems as Bilinear Systems Linear Parametric Systems — An Alternative Interpretation Consider bilinear control systems: � � m x ( t ) = Ax ( t ) + ˙ i =1 A i x ( t ) u i ( t ) + Bu ( t ) , Σ : y ( t ) = Cx ( t ) , x (0) = x 0 , where A , A i ∈ R n × n , B ∈ R n × m , C ∈ R q × n . ➞ Peter Benner, benner@mpi-magdeburg.mpg.de Balancing-based Model Order Reduction for Nonlinear Systems 18/46
Parametric Systems as Bilinear Systems Linear Parametric Systems — An Alternative Interpretation Consider bilinear control systems: � � m x ( t ) = Ax ( t ) + ˙ i =1 A i x ( t ) u i ( t ) + Bu ( t ) , Σ : y ( t ) = Cx ( t ) , x (0) = x 0 , where A , A i ∈ R n × n , B ∈ R n × m , C ∈ R q × n . Key Observation [B./Breiten 2011] Consider parameters as additional inputs, a linear parametric system � m p x ( t ) = Ax ( t ) + ˙ i =1 a i ( p ) A i x ( t ) + B 0 u 0 ( t ) , y ( t ) = Cx ( t ) with B 0 ∈ R n × m 0 can be interpreted as bilinear system: � � T , u ( t ) := a 1 ( p ) a m p ( p ) u 0 ( t ) . . . � 0 � ∈ R n × m , 0 B := B 0 m = m p + m 0 . . . . ➞ Peter Benner, benner@mpi-magdeburg.mpg.de Balancing-based Model Order Reduction for Nonlinear Systems 18/46
Parametric Systems as Bilinear Systems Linear Parametric Systems — An Alternative Interpretation Linear parametric systems can be interpreted as bilinear systems. ➞ Peter Benner, benner@mpi-magdeburg.mpg.de Balancing-based Model Order Reduction for Nonlinear Systems 19/46
Parametric Systems as Bilinear Systems Linear Parametric Systems — An Alternative Interpretation Linear parametric systems can be interpreted as bilinear systems. Consequence Model order reduction techniques for bilinear systems can be applied to linear parametric systems! Here: balanced truncation for bilinear systems. ➞ Peter Benner, benner@mpi-magdeburg.mpg.de Balancing-based Model Order Reduction for Nonlinear Systems 19/46
Parametric Systems as Bilinear Systems Linear Parametric Systems — An Alternative Interpretation Linear parametric systems can be interpreted as bilinear systems. Consequence Model order reduction techniques for bilinear systems can be applied to linear parametric systems! Here: balanced truncation for bilinear systems. Alternative: H 2 -optimal rational interpolation/bilinear IRKA [ B./Breiten 2012, B./Bruns 2015, Flagg/Gugercin 2015 ] . ➞ Peter Benner, benner@mpi-magdeburg.mpg.de Balancing-based Model Order Reduction for Nonlinear Systems 19/46
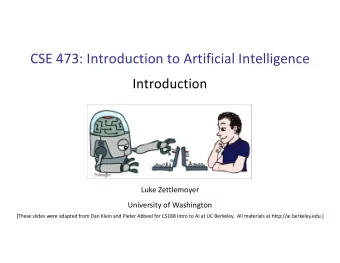
Application to Parametric MOR Fast Simulation of Cyclic Voltammogramms [Feng/Koziol/Rudnyi/Korvink 2006] E ˙ x ( t ) = ( A + p 1 ( t ) A 1 + p 2 ( t ) A 2 ) x ( t ) + B , y ( t ) = Cx ( t ) , x (0) = x 0 � = 0 , Rewrite as system with zero initial condition, FE model: n = 16 , 912 , m = 3 , q = 1, p j ∈ [0 , 10 9 ] time-varying voltage functions, transfer function G ( i ω, p 1 , p 2 ) , reduced system dimension r = 67, � G − ˆ G � 2 < 6 · 10 − 4 , max || G || 2 Figure: [Feng et al. 2006] ω ∈{ ω min ,...,ω max } p j ∈{ p min ,..., p max } evaluation times: FOM 4.5h, ROM 38s � speed-up factor ≈ 426. ➞ Peter Benner, benner@mpi-magdeburg.mpg.de Balancing-based Model Order Reduction for Nonlinear Systems 20/46
Application to Parametric MOR Fast Simulation of Cyclic Voltammogramms [Feng/Koziol/Rudnyi/Korvink 2006] Original. . . and reduced-order model. ➞ Peter Benner, benner@mpi-magdeburg.mpg.de Balancing-based Model Order Reduction for Nonlinear Systems 20/46
Outline 1. Introduction 2. Gramian-based Model Reduction for Linear Systems 3. Balanced Truncation for Bilinear Systems 4. Balanced Truncation for QB Systems Balanced Truncation for Nonlinear Systems Gramians for QB Systems Truncated Gramians Numerical Results 5. Balanced Truncation for Polynomial Systems ➞ Peter Benner, benner@mpi-magdeburg.mpg.de Balancing-based Model Order Reduction for Nonlinear Systems 21/46
Balanced Truncation for Nonlinear Systems Approaches Nonlinear balancing based on energy functionals [ Scherpen ’93, Gray/Mesko ’96 ] . Definition [ Scherpen ’93, Gray/Mesko ’96 ] The reachability energy functional, L c ( x 0 ), and observability energy functional, L o ( x 0 ) of a system are given as: � 0 � ∞ 1 L o ( x 0 ) = 1 � u ( t ) � 2 dt , � y ( t ) � 2 dt . L c ( x 0 ) = inf 2 2 u ∈ L 2 ( −∞ , 0] −∞ 0 x ( −∞ )=0 , x (0)= x 0 Disadvantage: energy functionals are the solutions of nonlinear Hamilton-Jacobi equations which are hardly solvable for large-scale systems. ➞ Peter Benner, benner@mpi-magdeburg.mpg.de Balancing-based Model Order Reduction for Nonlinear Systems 22/46
Balanced Truncation for Nonlinear Systems Approaches Nonlinear balancing based on energy functionals [ Scherpen ’93, Gray/Mesko ’96 ] . Disadvantage: energy functionals are the solutions of nonlinear Hamilton-Jacobi equations which are hardly solvable for large-scale systems. Empirical Gramians/frequency-domain POD [ Lall et al ’99, Willcox/Peraire ’02 ] . Example: controllability Gramian from time domain data (snapshots) 1. Define reachability Gramian of the system � ∞ x ( t ) x ( t ) T dt , P = where x ( t ) solves ˙ x = f ( x , δ ) , x (0) = x 0 . 0 2. Use time-domain integrator to produce snapshots x k ≈ x ( t k ), k = 1 , . . . , K . 3. Approximate P ≈ � K k =0 w k x k x T k with positive weights w k . 4. Analogously for observability Gramian. 5. Compute balancing transformation and apply it to nonlinear system. Disadvantage: Depends on chosen training input (e.g., δ ( t 0 )) like other POD approaches. ➞ Peter Benner, benner@mpi-magdeburg.mpg.de Balancing-based Model Order Reduction for Nonlinear Systems 22/46
Balanced Truncation for Nonlinear Systems Approaches Nonlinear balancing based on energy functionals [ Scherpen ’93, Gray/Mesko ’96 ] . Disadvantage: energy functionals are the solutions of nonlinear Hamilton-Jacobi equations which are hardly solvable for large-scale systems. Empirical Gramians/frequency-domain POD [ Lall et al ’99, Willcox/Peraire ’02 ] . Disadvantage: Depends on chosen training input (e.g., δ ( t 0 )) like other POD approaches. � Goal: computationally efficient and input-independent method! W. S. Gray and J. P. Mesko. Controllability and observability functions for model reduction of nonlinear systems. In Proc. of the Conf. on Information Sci. and Sys., pp. 1244–1249, 1996. C. Himpe. emgr — The empirical Gramian framework. Algorithms 11(7): 91, 2018. doi:10.3390/a11070091. S. Lall, J. Marsden, and S. Glavaˇ ski. A subspace approach to balanced truncation for model reduction of nonlinear control systems. International Journal of Robust and Nonlinear Control, 12:519-535, 2002. J. M. A. Scherpen. Balancing for nonlinear systems. Systems & Control Letters, 21:143–153, 1993. K. Willcox and J. Peraire, Balanced model reduction via the proper orthogonal decomposition. AIAA Journal, 40:2323-2330, 2002. ➞ Peter Benner, benner@mpi-magdeburg.mpg.de Balancing-based Model Order Reduction for Nonlinear Systems 22/46
Balanced Truncation for Nonlinear Systems Approaches Nonlinear balancing based on energy functionals [ Scherpen ’93, Gray/Mesko ’96 ] . Disadvantage: energy functionals are the solutions of nonlinear Hamilton-Jacobi equations which are hardly solvable for large-scale systems. Empirical Gramians/frequency-domain POD [ Lall et al ’99, Willcox/Peraire ’02 ] . Disadvantage: Depends on chosen training input (e.g., δ ( t 0 )) like other POD approaches. � Goal: computationally efficient and input-independent method! For recent developments on empirical Gramians, see [ Himpe ’18 ] . W. S. Gray and J. P. Mesko. Controllability and observability functions for model reduction of nonlinear systems. In Proc. of the Conf. on Information Sci. and Sys., pp. 1244–1249, 1996. C. Himpe. emgr — The empirical Gramian framework. Algorithms 11(7): 91, 2018. doi:10.3390/a11070091. S. Lall, J. Marsden, and S. Glavaˇ ski. A subspace approach to balanced truncation for model reduction of nonlinear control systems. International Journal of Robust and Nonlinear Control, 12:519-535, 2002. J. M. A. Scherpen. Balancing for nonlinear systems. Systems & Control Letters, 21:143–153, 1993. K. Willcox and J. Peraire, Balanced model reduction via the proper orthogonal decomposition. AIAA Journal, 40:2323-2330, 2002. ➞ Peter Benner, benner@mpi-magdeburg.mpg.de Balancing-based Model Order Reduction for Nonlinear Systems 22/46
Balanced Truncation for QB Systems Gramians for QB Systems A possible solution is to obtain bounds for the energy functionals, instead of computing them exactly. ➞ Peter Benner, benner@mpi-magdeburg.mpg.de Balancing-based Model Order Reduction for Nonlinear Systems 23/46
Balanced Truncation for QB Systems Gramians for QB Systems A possible solution is to obtain bounds for the energy functionals, instead of computing them exactly. For bilinear systems, such local bounds were derived in [ B./Damm 2011 ] using the solutions to the Lyapunov-plus-positive equations: AP + PA T + � m i + BB T = 0 , i =1 A i PA T A T Q + QA T + � m i =1 A T i QA i + C T C = 0 . (If their solutions exist, they define reachability and observability Gramians of BIBO stable bilinear system.) Here we aim at determining algebraic Gramians for QB (and polynomial) systems, which provide bounds for the energy functionals of QB systems, generalize the Gramians of linear and bilinear systems, and allow us to find the states that are hard to control as well as hard to observe in an efficient and reliable way. ➞ Peter Benner, benner@mpi-magdeburg.mpg.de Balancing-based Model Order Reduction for Nonlinear Systems 23/46
Gramians for QB Systems Controllability Gramians Consider input → state map of QB system ( m = 1 , N ≡ A 1 ): x ( t ) = Ax ( t ) + Hx ( t ) ⊗ x ( t ) + Nx ( t ) u ( t ) + Bu ( t ) , ˙ x (0) = 0 . Integration yields t t � � e A σ 1 Bu ( t − σ 1 ) d σ 1 + e A σ 1 Nx ( t − σ 1 ) u ( t − σ 1 ) d σ 1 x ( t ) = 0 0 t � e A σ 1 Hx ( t − σ 1 ) ⊗ x ( t − σ 1 ) d σ 1 + 0 [ Rugh ’81 ] ➞ Peter Benner, benner@mpi-magdeburg.mpg.de Balancing-based Model Order Reduction for Nonlinear Systems 24/46
Gramians for QB Systems Controllability Gramians Consider input → state map of QB system ( m = 1 , N ≡ A 1 ): x ( t ) = Ax ( t ) + Hx ( t ) ⊗ x ( t ) + Nx ( t ) u ( t ) + Bu ( t ) , ˙ x (0) = 0 . Integration yields t t � � e A σ 1 Bu ( t − σ 1 ) d σ 1 + e A σ 1 Nx ( t − σ 1 ) u ( t − σ 1 ) d σ 1 x ( t ) = 0 0 t � e A σ 1 Hx ( t − σ 1 ) ⊗ x ( t − σ 1 ) d σ 1 + 0 t t t − σ 1 � � � e A σ 1 Bu ( t − σ 1 ) d σ 1 + e A σ 1 Ne A σ 2 Bu ( t − σ 1 ) u ( t − σ 1 − σ 2 ) d σ 1 d σ 2 = 0 0 0 t − σ 1 t − σ 1 t � � � e A σ 1 H ( e A σ 2 B ⊗ e A σ 3 B ) u ( t − σ 1 − σ 2 ) u ( t − σ 1 − σ 3 ) d σ 1 d σ 2 d σ 3 + . . . + 0 0 0 [ Rugh ’81 ] ➞ Peter Benner, benner@mpi-magdeburg.mpg.de Balancing-based Model Order Reduction for Nonlinear Systems 24/46
Gramians for QB Systems Controllability Gramians Consider input → state map of QB system ( m = 1 , N ≡ A 1 ): x ( t ) = Ax ( t ) + Hx ( t ) ⊗ x ( t ) + Nx ( t ) u ( t ) + Bu ( t ) , ˙ x (0) = 0 . Integration yields t t � � e A σ 1 Bu ( t − σ 1 ) d σ 1 + e A σ 1 Nx ( t − σ 1 ) u ( t − σ 1 ) d σ 1 x ( t ) = 0 0 t � e A σ 1 Hx ( t − σ 1 ) ⊗ x ( t − σ 1 ) d σ 1 + 0 t t t − σ 1 � � � e A σ 1 Bu ( t − σ 1 ) d σ 1 + e A σ 1 Ne A σ 2 Bu ( t − σ 1 ) u ( t − σ 1 − σ 2 ) d σ 1 d σ 2 = 0 0 0 t − σ 1 t − σ 1 t � � � e A σ 1 H ( e A σ 2 B ⊗ e A σ 3 B ) u ( t − σ 1 − σ 2 ) u ( t − σ 1 − σ 3 ) d σ 1 d σ 2 d σ 3 + . . . + 0 0 0 By iteratively inserting expressions for x ( t − • ), we obtain the Volterra series expansion for the QB system. [ Rugh ’81 ] ➞ Peter Benner, benner@mpi-magdeburg.mpg.de Balancing-based Model Order Reduction for Nonlinear Systems 24/46
Gramians for QB Systems Controllability Gramians Using the Volterra kernels , we can define the controllability mappings Π 1 ( t 1 ) := e At 1 B , Π 2 ( t 1 , t 2 ) := e At 1 N Π 1 ( t 2 ) , Π 3 ( t 1 , t 2 , t 3 ) := e At 1 [ H (Π 1 ( t 2 ) ⊗ Π 1 ( t 3 )) , N Π 2 ( t 1 , t 2 )] , . . . and a candidate for a new Gramian: � ∞ � ∞ ∞ � Π k ( t 1 , . . . , t k )Π k ( t 1 , . . . , t k ) T dt 1 . . . dt k . P := P k , where P k = · · · 0 0 k =1 ➞ Peter Benner, benner@mpi-magdeburg.mpg.de Balancing-based Model Order Reduction for Nonlinear Systems 25/46
Gramians for QB Systems Controllability Gramians Using the Volterra kernels , we can define the controllability mappings Π 1 ( t 1 ) := e At 1 B , Π 2 ( t 1 , t 2 ) := e At 1 N Π 1 ( t 2 ) , Π 3 ( t 1 , t 2 , t 3 ) := e At 1 [ H (Π 1 ( t 2 ) ⊗ Π 1 ( t 3 )) , N Π 2 ( t 1 , t 2 )] , . . . and a candidate for a new Gramian: � ∞ � ∞ ∞ � Π k ( t 1 , . . . , t k )Π k ( t 1 , . . . , t k ) T dt 1 . . . dt k . P := P k , where P k = · · · 0 0 k =1 Theorem [ B./Goyal ’16 ] If it exists, the new controllability Gramian P for QB (MIMO) systems with stable A solves the quadratic Lyapunov equation m � AP + PA T + k + H ( P ⊗ P ) H T + BB T = 0 . A k PA T k =1 Note: H = 0 � ”bilinear reachability Gramian”; if additionally, all A k = 0 � linear one. ➞ Peter Benner, benner@mpi-magdeburg.mpg.de Balancing-based Model Order Reduction for Nonlinear Systems 25/46
Gramians for QB Systems Dual systems and observability Gramians [ Fujimoto et al. ’02 ] Controllability energy functional (Gramian) of the dual system ⇔ observability energy functional (Gramian) of the original system. ➞ Peter Benner, benner@mpi-magdeburg.mpg.de Balancing-based Model Order Reduction for Nonlinear Systems 26/46
Gramians for QB Systems Dual systems and observability Gramians [ Fujimoto et al. ’02 ] Controllability energy functional (Gramian) of the dual system ⇔ observability energy functional (Gramian) of the original system. ➞ Peter Benner, benner@mpi-magdeburg.mpg.de Balancing-based Model Order Reduction for Nonlinear Systems 26/46
Gramians for QB Systems Dual systems and observability Gramians [ Fujimoto et al. ’02 ] Controllability energy functional (Gramian) of the dual system ⇔ observability energy functional (Gramian) of the original system. This allows to define dual systems for QB systems: � m x ( t ) = Ax ( t ) + Hx ( t ) ⊗ x ( t ) + ˙ k =1 A k x ( t ) u k ( t ) + Bu ( t ) , x (0) = 0 , � m x d ( t ) = − A T x d ( t ) − H (2) x ( t ) ⊗ x d ( t ) − k x d ( t ) u k ( t ) − C T u d ( t ) , k =1 A T ˙ x d ( ∞ ) = 0 , y d ( t ) = B T x d ( t ) , where H (2) is the mode-2 matricization of the QB Hessian. ➞ Peter Benner, benner@mpi-magdeburg.mpg.de Balancing-based Model Order Reduction for Nonlinear Systems 26/46
Gramians for QB Systems Dual systems and observability Gramians for QB systems [ B./Goyal ’17 ] Writing down the Volterra series for the dual system � observability mapping. This provides the observability Gramian Q for the QB system. It solves m � H (2) � T � A T Q + QA + A T k QA k + H (2) ( P ⊗ Q ) + C T C = 0 . k =1 ➞ Peter Benner, benner@mpi-magdeburg.mpg.de Balancing-based Model Order Reduction for Nonlinear Systems 27/46
Gramians for QB Systems Dual systems and observability Gramians for QB systems [ B./Goyal ’17 ] Writing down the Volterra series for the dual system � observability mapping. This provides the observability Gramian Q for the QB system. It solves m � H (2) � T � k QA k + H (2) ( P ⊗ Q ) A T Q + QA + A T + C T C = 0 . k =1 Remarks: – Observability Gramian depends on controllability Gramian! – For H = 0, obtain ”bilinear observability Gramian”, and if also all A k = 0, the linear one. ➞ Peter Benner, benner@mpi-magdeburg.mpg.de Balancing-based Model Order Reduction for Nonlinear Systems 27/46
Gramians and Energy Functionals Bounding the energy functionals: Lemma [ B./Goyal ’17 ] In a neighborhood of the stable equilibrium, B ε (0), L c ( x 0 ) ≥ 1 2 x T 0 P − 1 x 0 , L o ( x 0 ) ≤ 1 2 x T 0 Qx 0 , x 0 ∈ B ε (0) , for ”small signals” and x 0 pointing in unit directions. ➞ Peter Benner, benner@mpi-magdeburg.mpg.de Balancing-based Model Order Reduction for Nonlinear Systems 28/46
Gramians and Energy Functionals Bounding the energy functionals: Lemma [ B./Goyal ’17 ] In a neighborhood of the stable equilibrium, B ε (0), L c ( x 0 ) ≥ 1 2 x T 0 P − 1 x 0 , L o ( x 0 ) ≤ 1 2 x T 0 Qx 0 , x 0 ∈ B ε (0) , for ”small signals” and x 0 pointing in unit directions. Another interpretation of Gramians in terms of energy functionals 1. If the system is to be steered from 0 to x 0 , where x 0 �∈ range( P ), then L c ( x 0 ) = ∞ for all feasible input functions u . 2. If the system is (locally) controllable and x 0 ∈ ker ( Q ), then L o ( x 0 ) = 0. ➞ Peter Benner, benner@mpi-magdeburg.mpg.de Balancing-based Model Order Reduction for Nonlinear Systems 28/46
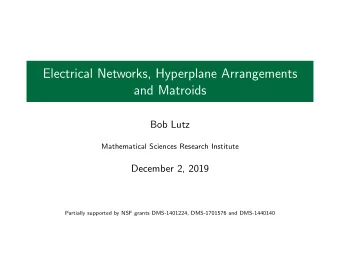
Gramians and Energy Functionals Illustration using a scalar system x ( t ) = ax ( t ) + hx 2 ( t ) + nx ( t ) u ( t ) + bu ( t ) , ˙ y ( t ) = cx ( t ) . ➞ Peter Benner, benner@mpi-magdeburg.mpg.de Balancing-based Model Order Reduction for Nonlinear Systems 29/46
Gramians and Energy Functionals Illustration using a scalar system x ( t ) = ax ( t ) + hx 2 ( t ) + nx ( t ) u ( t ) + bu ( t ) , ˙ y ( t ) = cx ( t ) . · 10 − 2 · 10 − 2 Actual energy Actual energy 3 6 Via Gramians Via Gramians 2 4 1 2 0 0 − 0 . 2 0 0 . 2 − 0 . 2 0 0 . 2 x x (a) Input energy lower bound. (b) Output energy upper bound. Figure: Comparison of energy functionals for − a = b = c = 2 , h = 1 , n = 0. ➞ Peter Benner, benner@mpi-magdeburg.mpg.de Balancing-based Model Order Reduction for Nonlinear Systems 29/46
Truncated Gramians Now, the main obstacle for using the new Gramians is the solution of the (quadratic) Lyapunov-type equations. ➞ Peter Benner, benner@mpi-magdeburg.mpg.de Balancing-based Model Order Reduction for Nonlinear Systems 30/46
Truncated Gramians Now, the main obstacle for using the new Gramians is the solution of the (quadratic) Lyapunov-type equations. Fix point iteration scheme can be employed but very expensive. [ Damm ’08 ] ➞ Peter Benner, benner@mpi-magdeburg.mpg.de Balancing-based Model Order Reduction for Nonlinear Systems 30/46
Truncated Gramians Now, the main obstacle for using the new Gramians is the solution of the (quadratic) Lyapunov-type equations. Fix point iteration scheme can be employed but very expensive. [ Damm ’08 ] To overcome this issue, we propose truncated Gramians for QB systems. ➞ Peter Benner, benner@mpi-magdeburg.mpg.de Balancing-based Model Order Reduction for Nonlinear Systems 30/46
Truncated Gramians Now, the main obstacle for using the new Gramians is the solution of the (quadratic) Lyapunov-type equations. Fix point iteration scheme can be employed but very expensive. [ Damm ’08 ] To overcome this issue, we propose truncated Gramians for QB systems. Definition (Truncated Gramians) [ B./Goyal ’16 ] The truncated Gramians P T and Q T for QB systems satisfy � m AP T + P T A T = − BB T − k =1 A k P l A T k − H ( P l ⊗ P l ) H T , � m A T Q T + Q T A = − C T C − k =1 A T k Q l A k − H (2) ( P l ⊗ Q l )( H (2) ) T , where AP l + P l A T = − BB T A T Q l + Q l A = − C T C . and ➞ Peter Benner, benner@mpi-magdeburg.mpg.de Balancing-based Model Order Reduction for Nonlinear Systems 30/46
Truncated Gramians Advantages of truncated Gramians (T-Gramians) T-Gramians approximate energy functionals better than the actual Gramians. ➞ Peter Benner, benner@mpi-magdeburg.mpg.de Balancing-based Model Order Reduction for Nonlinear Systems 31/46
Truncated Gramians Advantages of truncated Gramians (T-Gramians) T-Gramians approximate energy functionals better than the actual Gramians. · 10 − 2 · 10 − 2 Actual energy Actual energy 3 6 Via Gramians Via Gramians Via T-Gramians Via T-Gramians 2 4 1 2 0 0 − 0 . 2 0 0 . 2 − 0 . 2 0 0 . 2 x x (a) Input energy lower bounds. (b) Output energy upper bounds. Figure: Comparison of energy functionals for − a = b = c = 2 , h = 1 , n = 0. ➞ Peter Benner, benner@mpi-magdeburg.mpg.de Balancing-based Model Order Reduction for Nonlinear Systems 31/46
Truncated Gramians Advantages of truncated Gramians (T-Gramians) T-Gramians approximate energy functionals better than the actual Gramians. σ i ( P · Q ) > σ i ( P T · Q T ) ⇒ obtain smaller order of reduced system if truncation is done at the same cutoff threshold. ➞ Peter Benner, benner@mpi-magdeburg.mpg.de Balancing-based Model Order Reduction for Nonlinear Systems 31/46
Truncated Gramians Advantages of truncated Gramians (T-Gramians) T-Gramians approximate energy functionals better than the actual Gramians. σ i ( P · Q ) > σ i ( P T · Q T ) ⇒ obtain smaller order of reduced system if truncation is done at the same cutoff threshold. Most importantly, we need solutions of only four standard Lyapunov equations. ➞ Peter Benner, benner@mpi-magdeburg.mpg.de Balancing-based Model Order Reduction for Nonlinear Systems 31/46
Truncated Gramians Advantages of truncated Gramians (T-Gramians) T-Gramians approximate energy functionals better than the actual Gramians. σ i ( P · Q ) > σ i ( P T · Q T ) ⇒ obtain smaller order of reduced system if truncation is done at the same cutoff threshold. Most importantly, we need solutions of only four standard Lyapunov equations. Interpretation of controllability/observability of the system via T-Gramians: If the system is to be steered from 0 to x 0 , where x 0 �∈ range( P T ), then L c ( x 0 ) = ∞ . If the system is controllable and x 0 ∈ ker ( Q T ), then L o ( x 0 ) = 0. ➞ Peter Benner, benner@mpi-magdeburg.mpg.de Balancing-based Model Order Reduction for Nonlinear Systems 31/46
Recommend






More recommend
Explore More Topics
Stay informed with curated content and fresh updates.