
Adaptive Large Neighborhood Search for Scheduling of Mobile Robots - PowerPoint PPT Presentation
Adaptive Large Neighborhood Search for Scheduling of Mobile Robots Quang-Vinh Dang 1 , 2 Hana Rudov 1 Cong Thang Nguyen 3 1 Masaryk University, Czech Republic 2 Eindhoven University of Technology, The Netherlands 3 Ho Chi Minh City University of
Adaptive Large Neighborhood Search for Scheduling of Mobile Robots Quang-Vinh Dang 1 , 2 Hana Rudová 1 Cong Thang Nguyen 3 1 Masaryk University, Czech Republic 2 Eindhoven University of Technology, The Netherlands 3 Ho Chi Minh City University of Technology, Vietnam This presentation: http://www.fi.muni.cz/~hanka/publ/gecco19-slides.pdf
Adaptive large neighborhood search for scheduling of mobile robots: outline Problem = scheduling with mobile robots Algorithm = extension of adaptive large neighborbood search [1] New: exploration & exploitation heuristics Experiments Impact of proposed heuristics Comparison with MIP and hybrid GA Real-time results: important for smart factories 1. Ropke and Pisinger, An adaptive large neighborhood search heuristic for the pickup and delivery problem with time windows. Transportation science 40(4):455–472, 2006. GECCO 2019: Dang, Rudová, Nguyen, ALNS for Scheduling of Mobile Robots 2
Scheduling with mobile robots Job shop problem with robot processing and transportation Machines Distance matrix One machine can process at most one job any time Jobs Several non-overlapping operations Given order of operations Different machine for each operation Robots Identical Transport jobs between machines Process some operations with machines GECCO 2019: Dang, Rudová, Nguyen, ALNS for Scheduling of Mobile Robots 3
Scheduling with mobile robots: example Machine L/U M1 M2 M3 M4 Goal L/U 0 6 8 10 12 Assign time and robot M1 12 0 6 8 10 for processing and transportation M2 10 6 0 6 8 Minimize makespan M3 8 8 6 0 6 M4 6 10 8 6 0 Job 1 M1(8) M2(16) M4(12) Job 2 M1(20) M3(10) M2(18) Job 3 M3(12) M4(8) M1(15) Job 4 M4(14) M2(18) – Job 5 M3(10) M1(15) – GECCO 2019: Dang, Rudová, Nguyen, ALNS for Scheduling of Mobile Robots 4
Our adaptive large neighborhood search (ALNS) s ← s o ; s best ← s o ; i → 1; exploit ← 0; while i ≤ maxIterations do i ← i + 1; if exploit ≤ maxExploit then select exploitation heuristic h ; else select exploration heuristic h ; generate and evaluate new solution s new from s using heuristic h ; if f ( s new ) < f ( s best ) then s best ← s new ; s ← s new ; exploit ← 0; elseif f ( s new ) < f ( s ) or f ( s new ) − f ( s best ) ≤ T then f ( s new ) s ← s new ; decrease threshold T ; each u -th iteration: increase adaptive weights of heuristics; GECCO 2019: Dang, Rudová, Nguyen, ALNS for Scheduling of Mobile Robots 5
Adaptive heuristics Learning process Selection of heuristics successful in past Increase of the weight of heuristics when Best solution was found Improving solution was found We have accepted solution GECCO 2019: Dang, Rudová, Nguyen, ALNS for Scheduling of Mobile Robots 6
Exploration heuristics Diversify the search Destroy and repair a large number of elements of a solution or Random destroy and repair Examples Random change transporting robots for several random operations Move several operations with close starting times 9 heuristics in total GECCO 2019: Dang, Rudová, Nguyen, ALNS for Scheduling of Mobile Robots 7
Exploitation heuristics Intensify the search Destroy and repair one or a couple of elements of a solution or Deterministic destroy and repair Examples Change all transporting robots arriving too late Swap two random operations and their robots 9 heuristics in total GECCO 2019: Dang, Rudová, Nguyen, ALNS for Scheduling of Mobile Robots 8
Impact of heuristics Explore % Chosen % Best Exploit % Chosen % Best found found h1 10.9 4.4 h10 0.1 10.4 h2 18.4 1.1 h11 0.1 12.7 h3 3.5 0.3 h12 0.3 1.1 h4 20.3 7.2 h13 0.3 0.8 h5 20.3 6.9 h14 0.5 9.0 h6 15.8 3.5 h15 0.6 12.5 h7 1.1 0.1 h16 0.4 6.6 h8 1.6 0.3 h17 0.7 16.6 h9 4.8 0.3 h18 0.4 6.2 High weight of heuristics ⇒ Chosen many times ⇒ Explore search space GECCO 2019: Dang, Rudová, Nguyen, ALNS for Scheduling of Mobile Robots 9
Summary of experiments Benchmark problems from [2,3] 40 problems: transportation times ∼ processing times 42 problems: transportation times « processing times Impact of heuristics Parameter tuning ANOVA for parameters adaptive weights, initial threshold, iterations for exploitations ALNS vs. hybrid genetic algorithm [3] Computation with default setting / within 1 second Pair T-test ALNS vs. MIP [3] 2. Bilge and Ulusoy, A time window approach to simultaneous scheduling of machines and material handling system in an FMS. Operations Research 43(6):1058–1070, 1995. 3. Dang, Nguyen, Rudová, Scheduling of mobile robots for transportation and manufacturing tasks. Journal of Heuristics, 25(2):175–213, 2019. GECCO 2019: Dang, Rudová, Nguyen, ALNS for Scheduling of Mobile Robots 10
Our ALNS vs. MIP Runtimes ALNS: 0.49 seconds MIP: mins to hours GECCO 2019: Dang, Rudová, Nguyen, ALNS for Scheduling of Mobile Robots 11
Our ALNS vs. hybrid GA: 40 problems GECCO 2019: Dang, Rudová, Nguyen, ALNS for Scheduling of Mobile Robots 12
Our ALNS vs. hybrid GA: 42 problems GECCO 2019: Dang, Rudová, Nguyen, ALNS for Scheduling of Mobile Robots 13
Conclusion ALNS extended by exploration and exploitation heuristics Exploration heuristics Chosen many times & explore the search space Exploitation heuristics Find the best solutions Proposed heuristics of scheduling of mobile robots Near-optimal quality solutions in real time Important for smart factories In order of magnitude faster than hybrid GA GECCO 2019: Dang, Rudová, Nguyen, ALNS for Scheduling of Mobile Robots 14
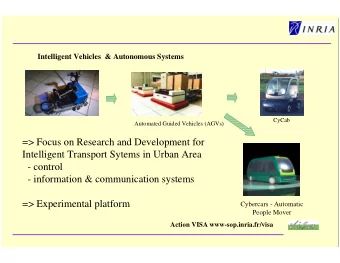
Future & ongoing work Further experiments on larger problems ALNS combined with integer linear programming Scheduling of automated guided vehicles (AGVs) under battery constraints Project Advanced Manufacturing Logistics Brainport Industries Campus Eindhoven, the Netherlands Real demonstrations with online algorithms 5–6 workstations/machines, 20 transportation requests 2 AGVs: different type GECCO 2019: Dang, Rudová, Nguyen, ALNS for Scheduling of Mobile Robots 15
Additional slides GECCO 2019: Dang, Rudová, Nguyen, ALNS for Scheduling of Mobile Robots 16
Solution representation Element e e 1 e 2 e 3 e 4 e 5 e 6 Sequence of operations 21 11 31 12 22 32 Transporting robot 1 2 1 2 1 1 Processing robot – 2 – – 2 1 Machine 1 3 2 1 2 3 GECCO 2019: Dang, Rudová, Nguyen, ALNS for Scheduling of Mobile Robots 17
Our ALNS vs. hybrid GA: pair T-tests 40 problems 42 problems default 1s default 1s ALNS with better mean & statist. diff. 3 39 8 29 ALNS with better mean 2 – 2 1 Same results 3 1 26 12 ALNS with worse mean 6 – 2 – ALNS with worse mean & statist. diff. 26 – 4 – GECCO 2019: Dang, Rudová, Nguyen, ALNS for Scheduling of Mobile Robots 18
Further experiments: our ALNS with even stronger results Current/additional benchmark problems from [3] 5–8 / 8–9 jobs 13–21 / 40–50 operations 4 / 8–10 machines 2 / 3–4 robots Computation with default setting: ALNS vs. hybrid GA 16.1 vs. 1.70 seconds Gap in mean: from -0.7 % to 3.0% Gap in best: from 0.0 % to 4.9% Pair T-test: there is no difference between means based on P-value Computation within 1 second: ALNS vs. hybrid GA Gap in mean: from -29.4 % to -9.9% Gap in best: from -30.1 % to -5.4% GECCO 2019: Dang, Rudová, Nguyen, ALNS for Scheduling of Mobile Robots 19
Our ALNS vs. hybrid GA: default setting → 5.2 seconds GECCO 2019: Dang, Rudová, Nguyen, ALNS for Scheduling of Mobile Robots 20
Our ALNS vs. hybrid GA: 1 second GECCO 2019: Dang, Rudová, Nguyen, ALNS for Scheduling of Mobile Robots 21
Recommend


















More recommend
Explore More Topics
Stay informed with curated content and fresh updates.