A systematic approach to constructing families of incremental - PowerPoint PPT Presentation
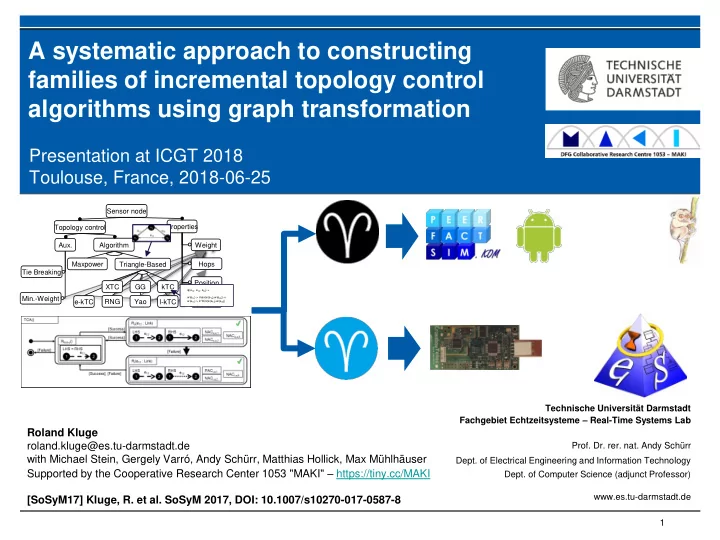
A systematic approach to constructing families of incremental topology control algorithms using graph transformation Presentation at ICGT 2018 Toulouse, France, 2018-06-25 Sensor node Properties Topology control Aux. Algorithm Weight
A systematic approach to constructing families of incremental topology control algorithms using graph transformation Presentation at ICGT 2018 Toulouse, France, 2018-06-25 Sensor node Properties Topology control Aux. Algorithm Weight Maxpower Triangle-Based Hops Tie Breaking Position XTC GG kTC φ (e 12 , e 13 , e 32 ) = Min.-Weight w(e 12 ) > max(w(e 13 ),w(e 23 )) ᴧ RNG Yao Energy e-kTC l-kTC w(e 12 ) > k*min(w(e 13 ),w(e 23 )) Technische Universität Darmstadt Fachgebiet Echtzeitsysteme – Real-Time Systems Lab Roland Kluge roland.kluge@es.tu-darmstadt.de Prof. Dr. rer. nat. Andy Schürr with Michael Stein, Gergely Varró, Andy Schürr, Matthias Hollick, Max Mühlhäuser Dept. of Electrical Engineering and Information Technology Supported by the Cooperative Research Center 1053 "MAKI" – https://tiny.cc/MAKI Dept. of Computer Science (adjunct Professor) www.es.tu-darmstadt.de [SoSyM17] Kluge, R. et al. SoSyM 2017, DOI: 10.1007/s10270-017-0587-8 1
Example: da_sense – A hybrid sensor network for Smart Cities (“ Digitalstadt Darmstadt”) (I) An Urban Management Platform based on heterogeneous sensor networks Traffic : static at traffic lights Temperature : mobile on trams Noise : mobile via Android app http://www.da-sense.de/ Image Sources: Traffic light: https://wiki.freiheitsfoo.de/pmwiki.php?n=Main.Ampel-Kameras | Tram: "Die Transparente Stadt" https://www.youtube.com/watch?v=JimyRNyLZKo | Android screenshots and map: http://www.da-sense.de/ Kluge et al. | Real-Time Systems Lab | Prof. Dr. Andy Schürr | A systematic approach to constructing families of incremental topology control algorithms using graph transformation 2
Example: da_sense – A hybrid sensor network for Smart Cities (“Digitalstadt Darmstadt”) (II) An Urban Management Platform based on heterogeneous sensor networks Traffic : static at traffic lights Temperature : mobile on trams Noise : mobile via Android app http://www.da-sense.de/ Image Sources: Traffic light: https://wiki.freiheitsfoo.de/pmwiki.php?n=Main.Ampel-Kameras | Tram: "Die Transparente Stadt" https://www.youtube.com/watch?v=JimyRNyLZKo | Android screenshots and map: http://www.da-sense.de/ Kluge et al. | Real-Time Systems Lab | Prof. Dr. Andy Schürr | A systematic approach to constructing families of incremental topology control algorithms using graph transformation 3 3
Graph-based topology model for Wireless Sensor Networks Wireless Sensor Network topology Transmission range of n 1 Wireless node n 1 1 2 Wireless link e 12 with link weight w(e 12 ) 2 3 2 TelosB 2 sensor node 3 4 48kB ROM, 10kB RAM, 2xAAA battery y x Image Sources: TelosB Sensor node: Wiki Commons, CC-BY-3.0, by Jbasic, https://commons.wikimedia.org/wiki/File:TelosB.jpg Kluge et al. | Real-Time Systems Lab | Prof. Dr. Andy Schürr | A systematic approach to constructing families of incremental topology control algorithms using graph transformation 4
Topology control sparsens topologies to improve non-functional property Topo. Ctrl. Output topology Input topology Maintain connectivity Communication link Sensor node ID: 3 Kluge et al. | Real-Time Systems Lab | Prof. Dr. Andy Schürr | A systematic approach to constructing families of incremental topology control algorithms using graph transformation 5
Topology control by example: kTC algorithm kTC rule : "Inactivate a link if (and only if) it is (i) the weight-maximal link in a triangle and (ii) at least k -times longer than the weight-minimal link in the triangle." Input topology Output topology Active Reduced Inactive transmission 1 1 range of n 1 2 2 Topology control 2 2 3 3 2 2 2 2 3 3 4 4 y y x x k=1.2 Kluge et al. | Real-Time Systems Lab | Prof. Dr. Andy Schürr | A systematic approach to constructing families of incremental topology control algorithms using graph transformation 6
The curse of low abstraction in traditional communication system development Model Constraints ✓ Formalization, proofs,… (i) Specification: (ii) Simulation: (iii) Testbed: Graph theory, … C++, Java, … C, Assembler- like,… Limitations ✓ Code Iteration </> Implementation Porting Level of abstraction Image Sources: FlockLab https://www.flocklab.ethz.ch/wiki/chrome/site/wiki_public/observer/outdoor_1.jpg Kluge et al. | Real-Time Systems Lab | Prof. Dr. Andy Schürr | A systematic approach to constructing families of incremental topology control algorithms using graph transformation 7
Goal: Support the correct-by-construction development of topology control algorithms How to How to specify operationalize consistency consistency (declaratively)? preservation? Limitations ✓ Model Constraints ✓ Formalization, proofs,… Localization (i) Specification: (ii) Simulation: (iii) Testbed: Graph theory, … C, Java, … C, C++,… Iteration Code Extensible code gen. Extensible code gen. </> Level of abstraction How to ensure transparency / traceability? Kluge et al. | Real-Time Systems Lab | Prof. Dr. Andy Schürr | A systematic approach to constructing families of incremental topology control algorithms using graph transformation 8
MAKI for a better Future Internet Multi-Mechanismen-Adaption für das Künftige Internet C: Communication systems (concrete self-adaptive systems) P2P Streaming C/S Streaming HLS ... DASH Mesh Hybrid Tree B: Adaptation mechanisms (reusable components for adaptive systems) M onitor A nalyze P lan E xecute Knowledge Our area A: Construction methods (models, design patterns, languages) Network topologies and topology adaptation Specification languages Software engineering 𝑁 𝑁 𝑗 Transition 𝑘 https://www.maki.tu-darmstadt.de/ Kluge et al. | Real-Time Systems Lab | Prof. Dr. Andy Schürr | A systematic approach to constructing families of incremental topology control algorithms using graph transformation 9
Unstructured consistency specification Unstructured formulation kTC: "Inactivate a link if (and only if) it is (i) the weight-maximal link in a triangle and (ii) at least k-times longer than the weight-minimal link in the triangle." Structured formulation φ (e 12 , e 13 , e 32 ) = 3 e 13 e 23 ᴧ w(e 12 ) > max(w(e 13 ),w(e 23 )) ᴧ e 12 w(e 12 ) > k*min(w(e 13 ),w(e 23 )) 1 2 Structural constraint Attribute constraints Problem 1: Implicit, unstructured, or informal specification of constraints. Spec. Sim. Test. Kluge et al. | Real-Time Systems Lab | Prof. Dr. Andy Schürr | A systematic approach to constructing families of incremental topology control algorithms using graph transformation 10
Topology control algorithms form families ─ Family: common structural pattern ─ Algorithm: refinement based onattribute constraints Triangle-based g-kTC 3 RNG XTC kTC l-kTC l*-kTC 1 2 GG e-kTC Tree-based Cone-based θ Yao/CBTC SYaoGG 3 LMST 1 2 S ϴ GG LS ϴ GG Problem 2: Insufficient usage of relationships among topology control algorithms Spec. Sim. Test. builds on (uses/refines) Spec. Sim. Test. Kluge et al. | Real-Time Systems Lab | Prof. Dr. Andy Schürr | A systematic approach to constructing families of incremental topology control algorithms using graph transformation 11
TC Algorithm families are Dynamic Software Product Lines Mandatory feature Sensor node Optional feature XOR group Properties Topology control Aux. Algorithm Weight Maxpower Hops Triangle-Based Tie Breaking Position XTC GG kTC φ (e 12 , e 13 , e 32 ) = w(e 12 ) > max(w(e 13 ),w(e 23 )) ᴧ Min.-Weight Yao e-kTC RNG l-kTC Energy w(e 12 ) > k*min(w(e 13 ),w(e 23 )) Advantages: Reuse in of predicates, spec. of topology control reconfiguration Spec. Sim. Test. Spec. Sim. Test. Kluge et al. | Real-Time Systems Lab | Prof. Dr. Andy Schürr | A systematic approach to constructing families of incremental topology control algorithms using graph transformation 12
Graph constraints for specifying local consistency properties Active C i C a Inactive p i p a Don't care e ab c a e ab e cb b e ac c i a b c e ab e cb φ (e ab , e ac , e cb ) e ac a b Violated if match of p a φ (e ab , e ac , e cb ) exists. " Each inactive link should be part " No active link should be part of of a triangle for which φ holds" a triangle for which φ holds" Advantages: expressiveness, formal + domain-specific + operationalizeable Spec. Sim. Test. Kluge et al. | Real-Time Systems Lab | Prof. Dr. Andy Schürr | A systematic approach to constructing families of incremental topology control algorithms using graph transformation 13
Example: Fulfilled and violated constraints 1 2 1 1 3 7 3 5 ✔ C i 4 ✘ p i C a e ab a b p a c e ac e cb c i e ab c a b e ab e cb e ac φ (e ab , e ac , e cb ) a b φ (e ab , e ac , e cb ) Kluge et al. | Real-Time Systems Lab | Prof. Dr. Andy Schürr | A systematic approach to constructing families of incremental topology control algorithms using graph transformation 14
Recommend






More recommend
Explore More Topics
Stay informed with curated content and fresh updates.