23374: Real-Time Scanning with Jetson TX For Skin Cancer Detection Michael Gielda Jeremy Massey Antmicro Iko Business Development Manager Director
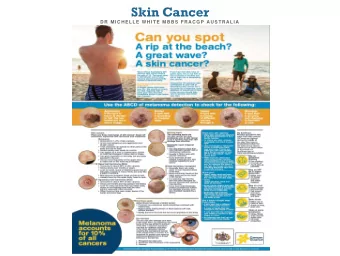
1 Skin Cancer
Most common form of cancer.
! Skin Cancer Rates
Types of skin cancer include: Basal Cell Carcinoma (BCC) • Squamous Cell Carcinoma (SCC) • Malignant Melanoma (MM) •
Malignant Melanoma Comparatively rare form. Highest mortality rate.
Detect it early! Early surgical intervention is cheap and almost 100% effective.
2 Current Methods
A Asymmetry B Border C Analysis Colour D Diameter E Evolution
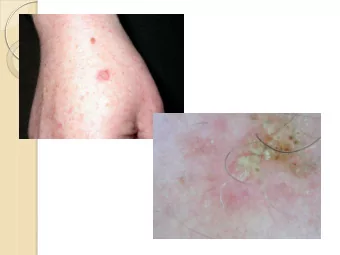
Dermoscopy
Photography
Digital Dermoscopy Hardware & Software
Mapping Software
Limitations of 3 Current Methods
Primary: 7.2mm Secondary: 5.9mm
Primary: 6.6mm Secondary: 5.1mm
Accuracy Primary: 91.6% Secondary: 86.4%
Accurate Affordable
Depth Imaging
Our patent-pending method of measuring surface features.
Figure 1 Figure 2 Figure 3
Figure 4 Figure 5 Figure 6
Figure 7 Figure 8 Figure 9
Length: 4.83mm
Length: 4.83mm
Length: 1.43mm
Length: 1.42mm
Length: 4.51mm
Length: 4.53mm
Accuracy > 99%
Accurate Affordable
Device Requirements Real-time 3D point cloud registration. • Real-time 2D de-mosaicing. • Real-time 3D mesh generation. •
CUDA & Jetson TX Requirements are well suited to parallel processing and the NVIDIA Jetson TX is perfectly suited for the task.
Features Data acquisition, display & storage: Depth and colour camera • connected to NVIDIA Jetson TX1/2 module. SD card for storage. • 5” LCD with capacitive touch • screen for UI. Communication: WiFi Connectivity • Wired Ethernet • Debugging via USB UART, OTG •
Getting the Vision / 3D Data PixeLink camera for colour data. • (Liquid lens!) RealSense SR300 for depth data. •
Challenges for Developing the Hardware Compactness • Easy Handling • Camera Integration • Heat Dissipation •
Compactness Making the device portable and reducing overall weight. Dealing with spatial • arrangement between cameras and lighting. Battery placement -> serving • as a hand grip. Placement of the display. •
Easy Handling Plexiglass construction makes (dis)assembling the prototype easy. Fully usable in field testing • while fastened. Particular sections of PCB • accessible for debugging. Convenient dismantling for • hardware maintenance.
Camera Integration USB-FFC adapter board for more robust work with USB 3.0 connectors.
Heat Dissipation Lots of heat sources – heat dissipating aluminum frame.
Accurate Affordable
Current methods of analysing and monitoring moles are labour intensive making them expensive.
Acquisition process has been reduced from potentially hours to a few minutes.
System designed with relatively low cost hardware.
Accurate Affordable
4 Future
Automated Analysis
Sharpened Original Corrected
A Asymmetry B Border C Colour D Diameter E Evolution
Thank you! Reach us at: Michael Gielda: mgielda@antmicro.com Jeremy Massey: jeremy@ikocorp.com
Recommend
More recommend
Unleash a World of Digital Possibilities—Browse, Share, and Explore Content Without Boundaries