11/27/2006 Massachusetts Institute of Technology Context Optimal - PDF document
11/27/2006 Massachusetts Institute of Technology Context Optimal predictive control of dynamic systems What is best sequence of control inputs that takes system state from Optimal, Robust Predictive the start to the goal? Control
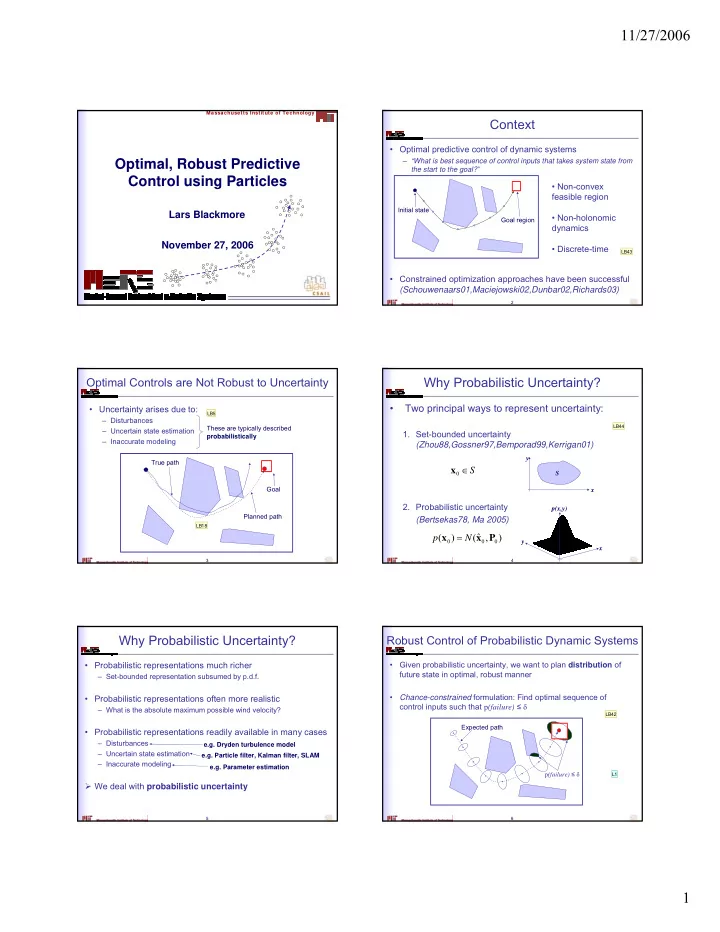
11/27/2006 Massachusetts Institute of Technology Context • Optimal predictive control of dynamic systems – “What is best sequence of control inputs that takes system state from Optimal, Robust Predictive the start to the goal?” Control using Particles • Non-convex feasible region Initial state Lars Blackmore • Non-holonomic Goal region dynamics November 27, 2006 • Discrete-time LB43 • Constrained optimization approaches have been successful (Schouwenaars01,Maciejowski02,Dunbar02,Richards03) 2 Why Probabilistic Uncertainty? Optimal Controls are Not Robust to Uncertainty • Two principal ways to represent uncertainty: • Uncertainty arises due to: LB5 – Disturbances LB44 These are typically described – Uncertain state estimation 1. Set-bounded uncertainty probabilistically – Inaccurate modeling (Zhou88,Gossner97,Bemporad99,Kerrigan01) y True path ∈ x S 0 S Goal x 2. Probabilistic uncertainty p(x,y) Planned path (Bertsekas78, Ma 2005) LB18 = ˆ ( ) ( , ) p x N x P 0 0 0 y x 3 4 Why Probabilistic Uncertainty? Robust Control of Probabilistic Dynamic Systems • Probabilistic representations much richer • Given probabilistic uncertainty, we want to plan distribution of future state in optimal, robust manner – Set-bounded representation subsumed by p.d.f. • Chance-constrained formulation: Find optimal sequence of • Probabilistic representations often more realistic control inputs such that p (failure) ≤ δ – What is the absolute maximum possible wind velocity? LB42 Expected path • Probabilistic representations readily available in many cases – Disturbances e.g. Dryden turbulence model – Uncertain state estimation e.g. Particle filter, Kalman filter, SLAM – Inaccurate modeling e.g. Parameter estimation p (failure) ≤ δ L1 � We deal with probabilistic uncertainty 5 6 1
Slide 2 LB43 Mention: Example: UAV path planning using Mixed Integer Linear Programming Lars Blackmore, 8/18/2006 Slide 3 LB5 Relate to UAV example Lars Blackmore, 8/14/2006 LB18 stress optimal paths particularly bad Lars Blackmore, 8/15/2006 Slide 4 LB44 Spend a little more time on this Lars Blackmore, 8/18/2006 Slide 6 LB42 stress the trade of performance vs conservatism Lars Blackmore, 8/18/2006 L1 mention the 3 challenges Lars, 8/20/2006
11/27/2006 Problem Statement Chance-constrained Control: Prior Work • Prior work developed chance-constrained Model Predictive Control (Li00, VanHessem04) • Design a finite, optimal sequence of control – Restricted to case of Gaussian uncertainty inputs u 0:T-1 such that system state trajectory leaves feasible region with probability at most δ – Restricted to control within convex regions [ ] ( , ) • We extend this work to arbitrary uncertainty • Cost function: h u x ( , ) � E h u x 0 : − 1 1 : T T 0 : − 1 1 : T T distributions and non-convex regions • Feasible region: F LB37 = ν � Chance-constrained particle control ( , , ) • System dynamics: x f u x 0 : − 1 0 0 : − 1 t t t t Random variables with known p.d.f.s Random variable with p.d.f. (at least approximately) to be optimized 7 8 Particles: Probabilistic Properties Chance-constrained Particle Control: Intuition • In estimation, Kalman Filters have been very successful for • Particles can approximate arbitrary distributions: linear systems, Gaussian noise – Draw N samples x (i) from a r.v. X with distribution p(x) – State distribution given model and observations can be calculated – Distribution approximated with delta functions at samples: analytically p(x) 1 N ∑ ≈ δ ( ) ( ) p x x • More recently, Particle Filters have been successful for ( ) i x N = 1 i nonlinear systems, with non-Gaussian noise x Samples drawn from X – State distribution is approximated by a number of particles 1 N ∫ ∑ ∫ ( ∈ ) = ( ) ≈ δ ( ) = fraction of particles in P X S p x dx x dx S – Convergence of approximation to true distribution as number of ( i ) x N S S = i 1 particles tends to infinity • Convergence results: – Number of particles used determined by available resources 1 N ∑ ( ) ⎯ ⎯ almost ⎯ surely ⎯ → → ∞ ( i ) [ ( )] as LB45 f x E f X N N • Idea: Use particles for anytime robust control = 1 i ⎯ almost ⎯ ⎯ surely ⎯ → ∈ → ∞ fraction of particles in set ( ) as S p X S N – Control the distribution of particles to achieve a probabilistic goal LB20 9 10 Technical Approach Technical Approach • Question: How can particles be used to solve chance- 1. Use particles to sample random variables constrained probabilistic control problem? ν p ν ( ) ~ ( ) ( i ) ~ ( ) = Κ = Κ i 1 0 x p x i N t T 0 0 t t • Chance-constrained particle control: 1. Use particles to sample random variables (noise, initial position, Goal Region disturbances) 2. Calculate future state trajectory for each particle leaving explicit dependence on control inputs u 0:T-1 Obstacle 1 3. Express probabilistic optimization problem approximately in terms of particles 4. Solve approximate deterministic optimization problem for u 0:T-1 Initial state distribution Obstacle 2 � Approximate optimization goal tends to true goal as number of Particles approximating particles tends to infinity initial state distribution 11 12 2
Slide 7 LB37 "state depends on x_0 and v which are... because they are random variables, x_t is also." Lars Blackmore, 8/16/2006 Slide 9 LB45 note anytime Lars Blackmore, 8/18/2006 Slide 10 LB20 these are used in filtering --> I will use for control Lars Blackmore, 8/15/2006
11/27/2006 Technical Approach Technical Approach 2. Calculate future state trajectory for each particle leaving 2. Calculate future state trajectory for each particle leaving explicit dependence on control inputs u 0:T-1 explicit dependence on control inputs u 0:T-1 ⎡ ⎤ ⎡ ⎤ ( ) ( ) x i x i 1 1 ⎢ ⎥ ⎢ ⎥ ( ) = ( , ( ) , ν ( ) ) ( ) = ( , ( ) , ν ( ) ) i i i ( ) = Μ i i i ( ) = Μ x f u x i x f u x i x ⎢ ⎥ x ⎢ ⎥ 0 : − 1 0 0 : − 1 1 : 0 : − 1 0 0 : − 1 1 : t t t t T t t t t T ⎢ ⎥ ⎢ ⎥ ( ) ( ) i i ⎣ x ⎦ ⎣ x ⎦ T T Particles 1…N Goal Region Goal Region Particle 1 for u = u B t=4 for u = u B LB38 Obstacle 1 Obstacle 1 t=3 LB24 LB21 t=4 Particles 1…N Particle 1 for u = u A t=2 t=3 for u = u A t=2 Obstacle 2 Obstacle 2 t=1 t=1 t=0 t=0 13 14 Technical Approach Technical Approach 3. Express probabilistic optimization problem approximately 4. Solve approximate deterministic optimization in terms of particles problem for u 0:T-1 δ = 0.1 LB46 Goal Region Goal Region Fraction of particles 10% of particles fail t=4 Sample mean of cost failing approximates in optimal solution t=4 function approximates probability of failure true expectation: Obstacle 1 [ ] Obstacle 1 ( , ) E h u x t=3 − 0 : T 1 1 : T t=3 Sample mean 1 N ∑ ≈ ( ) ( , i ) h u x approximates − 0 : T 1 1 : T t=2 t=2 N state mean = 1 Obstacle 2 i Obstacle 2 t=1 t=1 t=0 t=0 15 16 Convergence Convergence As N � ∞ , approximation becomes exact As N � ∞ , approximation becomes exact – – Goal Region Goal Region 10% probability of failure Obstacle 1 Obstacle 1 Obstacle 2 Obstacle 2 17 18 3
Slide 13 LB21 This is easy to do because all uncertainty has been removed Lars Blackmore, 8/15/2006 Slide 14 LB24 highlight every particle has same control input Lars Blackmore, 8/15/2006 LB38 stress a particle is a _trajectory_ Lars Blackmore, 8/16/2006 Slide 15 LB46 MAX failure rate Lars Blackmore, 8/18/2006
Recommend




More recommend
Explore More Topics
Stay informed with curated content and fresh updates.