1 Goals Assumptions Design a protocol that guarantees desired The - PDF document
Outline Pow er Management under Coverage and Connectivity Motivation Constraints in Sensor Coverage vs. Connectivity: Geometric Analysis Netw orks Coverage Configuration Protocol (CCP) Applying CCP to realistic applications
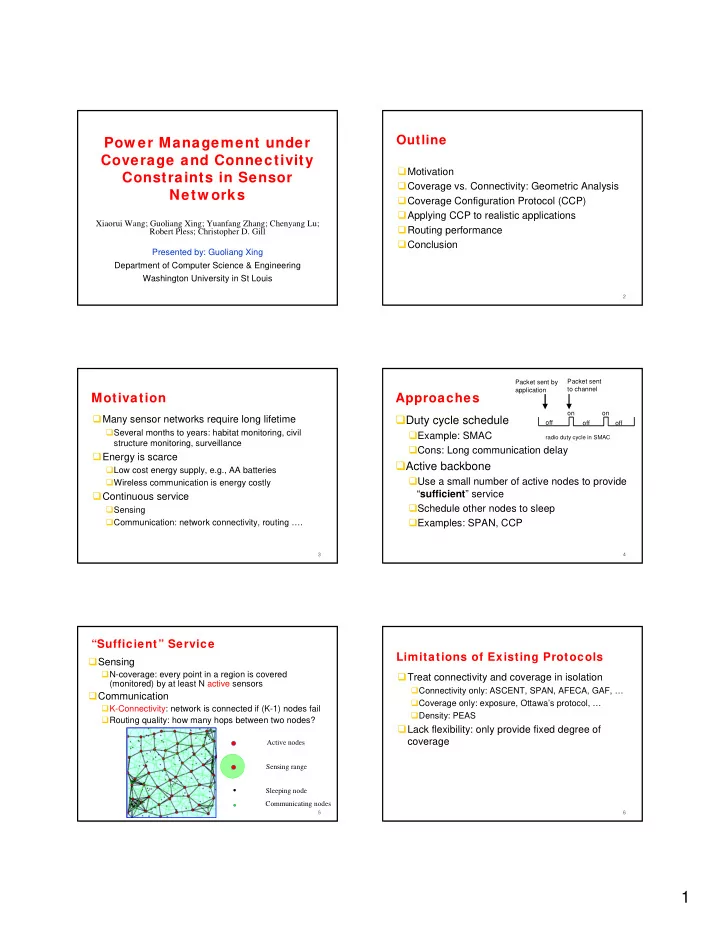
Outline Pow er Management under Coverage and Connectivity � Motivation Constraints in Sensor � Coverage vs. Connectivity: Geometric Analysis Netw orks � Coverage Configuration Protocol (CCP) � Applying CCP to realistic applications Xiaorui Wang; Guoliang Xing; Yuanfang Zhang; Chenyang Lu; � Routing performance Robert Pless; Christopher D. Gill � Conclusion Presented by: Guoliang Xing Department of Computer Science & Engineering Washington University in St Louis 2 Packet sent Packet sent by to channel application Motivation Approaches on on � Many sensor networks require long lifetime � Duty cycle schedule off off off � Several months to years: habitat monitoring, civil � Example: SMAC radio duty cycle in SMAC structure monitoring, surveillance � Cons: Long communication delay � Energy is scarce � Active backbone � Low cost energy supply, e.g., AA batteries � Use a small number of active nodes to provide � Wireless communication is energy costly “ sufficient ” service � Continuous service � Schedule other nodes to sleep � Sensing � Communication: network connectivity, routing …. � Examples: SPAN, CCP 3 4 “Sufficient” Service Limitations of Existing Protocols � Sensing � N-coverage: every point in a region is covered � Treat connectivity and coverage in isolation (monitored) by at least N active sensors � Connectivity only: ASCENT, SPAN, AFECA, GAF, … � Communication � Coverage only: exposure, Ottawa’s protocol, … � K-Connectivity: network is connected if (K-1) nodes fail � Density: PEAS � Routing quality: how many hops between two nodes? � Lack flexibility: only provide fixed degree of coverage Active nodes Sensing range Sleeping node Communicating nodes 5 6 1
Goals Assumptions � Design a protocol that guarantees desired � The region to be covered is convex � Disc models for coverage and communication coverage and connectivity � A point p is covered by a node v if |pv| < R s � Requirements � R s : Sensing range � Integrated : must guarantee both coverage and � Nodes u and v are connected if |uv| < R c connectivity � R c : Communication range � Flexible : can re-configure the network to different � Intuition: range ratio R c /R s is important! coverage degrees and connectivity R s � Meet diverse application requirements � Decentralized : achieve scalability R c 7 8 Outline Connectivity vs. Coverage � A connected network does not guarantee coverage � Motivation � Connectivity only concerns with node locations � Coverage vs. Connectivity: Geometric Analysis � Coverage must cover all locations in a region � True for any R c /R s � Coverage Configuration Protocol (CCP) � If R c /R s ≥ 2 � Simulation results � K -coverage � K -connectivity for all nodes � Routing performance � K -coverage � 2 K -connectivity for interior nodes � Conclusion � Interior node: a node whose sensing circle fully contained by the region 9 10 A Sufficient Condition for Implication of Geometric Analysis K-Coverage � Given a required coverage degree of K s , and a required � A convex region B is K-covered if all the intersection connectivity of K c points among sensing circles and/or B’s boundary inside B are K-covered � If R c ≥ 2R s , the protocol only needs to guarantee � Implication: a coverage configuration protocol only max(K s . K c ) coverage configuration � Solution: Coverage Configuration Protocol (CCP) needs to worry about intersection points! � If R c < 2R s , the protocol must address both coverage Intuition: All points in a and connectivity. same “patch” surrounded � Solution: CCP + SPAN by sensing circles share the same coverage degree S p Assumption: boundary of each circle is not covered by the sensor 11 12 2
Coverage Configuration Protocol K-Coverage Eligibility Rule (CCP) � All intersection points inside the sensing � Active nodes periodically broadcast and circle are K-covered? receive beacon messages � To evaluate eligibility, a node only needs to � Sleeping nodes periodically wake up and know the locations of active nodes within 2R s receive beacons on? � Change state based on the eligibility rule � Active � sleeping if the eligibility rule is true Active nodes � Sleeping � active if the eligibility rule is false Sleeping nodes Intersection point 13 14 Simulation: Coverage Configurability CCP+SPAN Min-500,700,900 Average-500 10 � When R c < 2R s , CCP cannot guarantee Average-700 Achieved Coverage degree connectivity. 8 Average-900 � Solution: CCP + SPAN 6 � Combined eligibility rule 4 � Sleeping � active if either CCP or SPAN 2 activates the node � Active � sleeping if both CCP and SPAN put 0 0 1 2 3 4 5 6 7 the node to sleep Required Coverage degree � CCP strictly enforces desired coverage degrees! 15 16 Simulation: SPAN Coverage+Connectivity (R c = 1.5R s ) � All nodes periodically broadcast/receive beacons � Change state based on the eligibility rule � Active � sleeping if the eligibility rule is false � Sleeping � active if the eligibility rule is true � Eligibility rule: � At least one pair of my neighbors cannot reach each SPAN CCP SPAN+CCP other either directly or via one or two active nodes? � Every sleeping node is within one hop of at least � Combination of SPAN & CCP is necessary for desired one active node coverage and connectivity when R c < 2R s 17 18 3
Simulation: Coverage vs R c /R s Simulation: Connectivity vs R c /R s Coverage Percentage Packet Delivery Ratio 1.1 1 1 Packet delivery ratio 0.9 Coverage Percentage 0.8 0.8 0.7 0.6 0.6 0.5 0.4 0.4 CCP-2Hop CCP-2Hop 0.3 SPAN+CCP-2Hop SPAN+CCP-2Hop CCP CCP 0.2 0.2 SPAN+CCP SPAN+CCP 0.1 SPAN SPAN 0 0 0.5 1 1.5 2 2.5 3 0.5 1 1.5 2 2.5 3 R c /R s R c /R s � CCP-based protocols guarantee coverage for all R c /R s � SPAN-based protocols delivers more packets � SPAN’s cannot guarantee coverage for any R c /R s � CCP cannot delivery all packets when R c /R s < 2 19 20 System LifeTime Outline � Motivation System Coverage Life (R c /R s =2.5) System Communication Life (R c /R s =2.5) 1.1 SPAN+CCP-300 � Coverage vs. Connectivity: Geometric Analysis 1 Original-300 SPAN+CCP-250 1 0.9 Original-250 SPAN+CCP-200 Coverage Percentage 0.8 0.9 � Coverage Configuration Protocol (CCP) Original-200 Delivery Ratio 0.7 0.8 0.6 � Applying CCP to realistic applications 0.5 0.7 0.4 � Routing performance 0.6 SPAN+CCP-300 0.3 Original-300 0.2 SPAN+CCP-250 � Conclusion 0.5 Original-250 0.1 Original-200 SPAN+CCP-200 0 0.4 0 100 200 300 400 500 600 700 800 900 1000 1100 0 100 200 300 400 500 600 700 800 9 Time Time 21 22 Applying CCP to Realistic Realistic Detection Applications Detection Applications � Requirements: detection prob., false alarm rate � Probabilistic sensing model � Probabilistic sensing range � A point within the sensing rang of a sensor is � Stochastic signals/noises covered with prob. P � Signal decay � Application requirement: (K, β ) coverage � Usually determined from empirical measurements � Multi-sensor data fusion � Prob(target is detected) ≥ β � Single sensor may be faulty and cause false alarms � Target detected if sensed by at least K sensors � Reliable detection decision should base on multiple � Solution: run CCP with coverage degree K’ sensor readings � Fusion rule: how to reach a final decision based on given by: ⎛ ⎞ − 1 ′ K K ∑ multiple sensor readings? s ⎜ ⎟ s i K ′ − i 1 − ( 1 − ) ≥ β ⎜ ⎟ P P s ⎝ i ⎠ = 0 i 23 24 4
Illustration: Applying CCP to Scalability and Performance Realistic Detection Applications Lower Bound of Psudo Coverage Degree vs. K s * vs. K s (P=0.8) 18 K s � The prob. is sensed by 17 11 16 Avg. ( β =0.80) 2 sensors must > 0.95 10 Lower Bound of Psudo Coverage Degree Avg. ( β =0.90) 15 Avg. ( β =0.95) 14 9 Min. ( β =0.85) � Each sensor senses 13 Min. ( β =0.90) 8 Min. ( β =0.95) 12 11 7 with prob. 0.9 10 * K s 6 9 � How many sensors are 8 5 7 4 6 needed to cover ? 5 3 4 3 2 P=0.7 Target 2 P=0.8 P=0.9 1 1 1 2 3 4 5 6 7 P=0.9, K=2, β =0.95, K’=? 1 2 3 4 5 6 7 8 9 10 11 K s Ks Sensing β =0.95 range 25 26 Impact of Sensing Coverage on Outline Routing Performance � Sensing coverage results in a special class of � Motivation topologies � Coverage vs. Connectivity: Geometric Analysis � Coverage � Node density/geometric properties � How do they affect routing performance? � Coverage Configuration Protocol (CCP) � Existing routing algorithms perform better? � Applying CCP to realistic applications � Can a routing algorithm take advantage of the � Routing performance network properties imposed by coverage? � Conclusion 27 28 Greedy Geographic Forw arding Pros and Cons of Greedy Forw arding • Forward packet to the neighbor with the shortest � Local decision based on neighbor locations distance to destination � Allow efficient implementation on constrained platforms � Match location-centric communication paradigm in WSN � Fail when a packet reaches a local minima � A node cannot find a neighbor better than shortest Euclidean distance to destination itself � Recovery schemes: face routing, flooding � Result in long routes A destination B • Does greedy geo-routing perform better on sensing-covered networks? • Can we establish analytical performance bounds? 29 30 5
Recommend


More recommend
Explore More Topics
Stay informed with curated content and fresh updates.