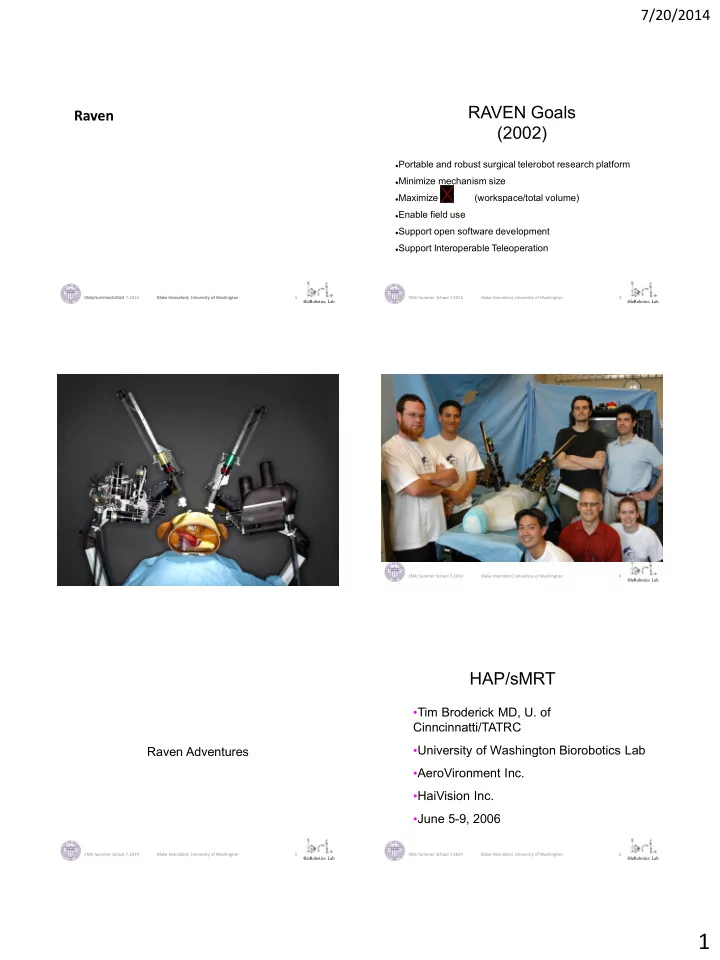
7/20/2014 RAVEN Goals Raven (2002) Portable and robust surgical telerobot research platform Minimize mechanism size Maximize (workspace/total volume) Enable field use Support open software development Support Interoperable Teleoperation CMU Summer School 7.2014 Google 13-Sept-2013 Blake Hannaford, University of Washington Blake Hannaford, University of Washington 1 CMU Summer School 7.2014 Blake Hannaford, University of Washington 2 Bio Robotics Lab Bio Robotics Lab CMU Summer School 7.2014 Blake Hannaford, University of Washington 3 CMU Summer School 7.2014 Blake Hannaford, University of Washington 4 Bio Robotics Lab Bio Robotics Lab HAP/sMRT • Tim Broderick MD, U. of Cinncinnatti/TATRC • University of Washington Biorobotics Lab Raven Adventures • AeroVironment Inc. • HaiVision Inc. • June 5-9, 2006 CMU Summer School 7.2014 Blake Hannaford, University of Washington 5 CMU Summer School 7.2014 Blake Hannaford, University of Washington 6 Bio Robotics Lab Bio Robotics Lab 1
7/20/2014 Goals HapSmrt Project Aerovironment UAV • Demonstrate Field operation of a surgical Seattle robot Surgical - Generator Power User Interface - Radio Internet Links - Desert Conditions • Demonstrate Internet + UAV local link for 5 mi. Internet Ground Station Surgical (Surgical User Interface) Robot telesurgery. Simi Valley, CA CMU Summer School 7.2014 Blake Hannaford, University of Washington 7 CMU Summer School 7.2014 Blake Hannaford, University of Washington 8 Bio Robotics Lab Bio Robotics Lab HapSmrt Project Mobilization! Seattle x Simi Valley, CA CMU Summer School 7.2014 Blake Hannaford, University of Washington 9 CMU Summer School 7.2014 Blake Hannaford, University of Washington 10 Bio Robotics Lab Bio Robotics Lab Site and UAV photos (panorama) CMU Summer School 7.2014 Blake Hannaford, University of Washington 11 CMU Summer School 7.2014 Blake Hannaford, University of Washington 12 Bio Robotics Lab Bio Robotics Lab 2
7/20/2014 CMU Summer School 7.2014 Blake Hannaford, University of Washington 13 CMU Summer School 7.2014 Blake Hannaford, University of Washington 14 Bio Robotics Lab Bio Robotics Lab Console CMU Summer School 7.2014 Blake Hannaford, University of Washington 15 CMU Summer School 7.2014 Blake Hannaford, University of Washington 16 Bio Robotics Lab Bio Robotics Lab Project Neemo-12 May 2007 CMU Summer School 7.2014 Blake Hannaford, University of Washington 17 CMU Summer School 7.2014 Blake Hannaford, University of Washington 18 Bio Robotics Lab Bio Robotics Lab 3
7/20/2014 People Goals ● Test RAVEN in extreme environment. ● Measure performance of telesurgery over Internet. ● Further harden RAVEN for field conditions ● Univ of Cincinnati: Tim Broderick, MD / and experimental use. Chuck Doarn PI ● Mitch Lum, Diana Friedman ● Tom Lendvay MD ● SRI – Pablo Garcia, Tom Low CMU Summer School 7.2014 Blake Hannaford, University of Washington 19 CMU Summer School 7.2014 Blake Hannaford, University of Washington 20 Bio Robotics Lab Bio Robotics Lab Aquarius Underwater Habitat Down goes the RAVEN ● 20m under water ● 5 mi off Key Largo ● 2 atm pressure ● NASA/NOAA CMU Summer School 7.2014 Blake Hannaford, University of Washington 21 CMU Summer School 7.2014 Blake Hannaford, University of Washington 22 Bio Robotics Lab Bio Robotics Lab CMU Summer School 7.2014 Blake Hannaford, University of Washington 23 CMU Summer School 7.2014 Blake Hannaford, University of Washington 24 Bio Robotics Lab Bio Robotics Lab 4
7/20/2014 Raven II CMU Summer School 7.2014 Blake Hannaford, University of Washington 25 CMU Summer School 7.2014 Blake Hannaford, University of Washington 26 Bio Robotics Lab Bio Robotics Lab Raven II Project U.C. Santa Cruz Prof. Jacob Rosen (2010-12) ● UW and U.C. Santa Cruz (Rosen) ● National Science Foundation ● Harvard,Hopkins, Nebraska, UCLA, Berkeley CMU Summer School 7.2014 Blake Hannaford, University of Washington 27 CMU Summer School 7.2014 Blake Hannaford, University of Washington 28 Bio Robotics Lab Bio Robotics Lab Kinematics Analysis Goals Set up a network of open research telerobots for medical applications Build seven “Raven - II” systems Improve the electronics Adapt software for easy collaborative development. CMU Summer School 7.2014 Blake Hannaford, University of Washington 29 CMU Summer School 7.2014 Blake Hannaford, University of Washington 30 Bio Robotics Lab Bio Robotics Lab 5
7/20/2014 Raven II Software APIs User / Research Applications V ROS N ROS Simulator e Visualizer t UDP w 1000 Hz real time control Teleop. o r k Linux Kernel (RT-Prempt Config) Linux Kernel (RT-Prempt Config) CMU Summer School 7.2014 Blake Hannaford, University of Washington 31 CMU Summer School 7.2014 Blake Hannaford, University of Washington 32 Bio Robotics Lab Bio Robotics Lab Electronics Stack e Computer Power/Safety +48VDC USB State I/O 2.0 Amplifiers E-Stop Amplifiers Rear of Amplifiers +48V Arm Arm USB 2.0 Safety Encoders Motors CMU Summer School 7.2014 Blake Hannaford, University of Washington 33 CMU Summer School 7.2014 Blake Hannaford, University of Washington 34 Bio Robotics Lab Bio Robotics Lab Power/Safety CMU Summer School 7.2014 Blake Hannaford, University of Washington 35 CMU Summer School 7.2014 Blake Hannaford, University of Washington 36 Bio Robotics Lab Bio Robotics Lab 6
7/20/2014 Completed Electronics CMU Summer School 7.2014 Blake Hannaford, University of Washington 37 CMU Summer School 7.2014 Blake Hannaford, University of Washington 38 Bio Robotics Lab Bio Robotics Lab University of Prof. Blake Washington Hannaford U.C. Santa Cruz Prof. Jacob Rosen 2012 Harvard Prof. Rob Beating Heart Surgery Howe Hopkins Prof. Greg Human-Machine Cooperation Hager Nebraska Prof. Shane Deployable surgical robots Farritor UCLA Prof. Warren Tactile feedback to surgeon Grundfest U.C. Berkeley Prof. Ken Machine Learning of surgical autonomy Goldberg & Pieter Abbeel 2013 Stanford University Prof. Allison NRI Large Project Okamura Montpellier University (Fr) Prof. Philipe Poignet U. of Central Florida Prof. Xu U. of Western Ontario Prof. Rajni (four-arm system) (Canada) Patel CMU Summer School 7.2014 Blake Hannaford, University of Washington 39 CMU Summer School 7.2014 Blake Hannaford, University of Washington 40 Bio Robotics Lab Bio Robotics Lab Raven Sites Raven Sites Washington (2) Berkeley Nebraska Harvard UCSC Hopkins UCLA NSF CRI Sites NSF CRI Sites (installed 2012) Additional Sites (2013) CMU Summer School 7.2014 Blake Hannaford, University of Washington 41 CMU Summer School 7.2014 Blake Hannaford, University of Washington 42 Bio Robotics Lab Bio Robotics Lab 7
7/20/2014 Raven Sites (2) NSF CRI Sites Final Negotiation Sites Discussion Sites CMU Summer School 7.2014 Blake Hannaford, University of Washington 43 Bio Robotics Lab 8
Recommend
More recommend
Unleash a World of Digital Possibilities—Browse, Share, and Explore Content Without Boundaries