Vicsek Flocking Dynamics and Phase Transition Jian-Guo Liu Duke - PowerPoint PPT Presentation
Vicsek Flocking Dynamics and Phase Transition Jian-Guo Liu Duke University Collaborators: Pierre Degond and Amic Frouvelle Institut de Math ematiques de Toulouse Frouvelle and Liu, Dynamics in a kinetic model of oriented particles with
Vicsek Flocking Dynamics and Phase Transition Jian-Guo Liu Duke University Collaborators: Pierre Degond and Amic Frouvelle Institut de Math´ ematiques de Toulouse
Frouvelle and Liu, Dynamics in a kinetic model of oriented particles with phase transition, SIMA 2012 Degond, Frouvelle, and Liu, Macroscopic limits and phase transition in a system of self-propelled particles Degond, Liu, Motsch, and Panferov, Existence theory for hydrodynamic models of self-alignment interactions Degong and Liu, Hydrodynamics of self-alignment interactions with precession and derivation of the Landau-Lifschitz-Gilbert equation, M3AS, 2012 Xiuqing Chen and Liu, Global weak entropy solution to Doi-Saintillan-Shelley model for active and passive rod-like particle, Chen’s talk this afternoon suspensions
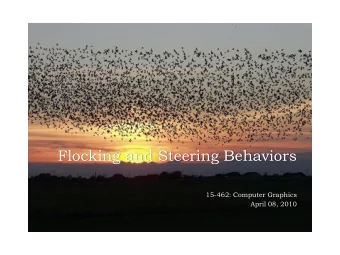
Emergence behavior of self-propelled agents patterns, structures, correlations, synchronization, only local interactions, no leader
3 zones: repulsion, alignment, attraction 3 classes of models: agent based, kinetic, hydrodynamics K ( r ) attraction Φ( r ) alignment 0 r repulsion alignment attraction Aoki ’82, Reynolds 86, Vicsek ’95, Toner and Tu ’98, Couzin ’02, Topaz and Bertozzi ’04, DOrsogna, Chuang, Bertozzi, Chayes 06’, Cucker and Smale ’07, Degond and Motsch ’08, Ha and Tadmor ’08, Ha and Liu ’09, Carrillo, Fornasier, Rosado ’10, etc
Agent based model of self-alignment with attraction-repulsion potential dx k = v k dt √ � � 2 τ dB k dv k = P v ⊥ v k dt + , P v ⊥ = Id − v ⊗ v . t k where j k + r k v k = ν | j k + r k | + δ, � � j k = K ( | x j − x k | ) v j , r k = −∇ x Φ( x k ) , Φ( x ) = φ ( | x j − x | ) , j j
Mean field kinetic equation f t + v · ∇ x f = −∇ v · [( P v ⊥ v f ) f ] + τ ∆ v f , where � j f + r f K ( | x ′ − x | ) v ′ f ( x ′ , v ′ , t ) dx ′ dv ′ , v f = ν | j f + r f | + δ, j f = x ′ , v ′ � Φ( | x ′ − x | ) f ( x ′ , v ′ , t ) dx ′ dv ′ . r f = −∇ x x ′ , v ′ c.f. Bolley, Caizo, & Carrillo 2012
Hydrodynamical equations Hydrodynamical rescaling f t + v · ∇ x f = − 1 ǫ ( ∇ v · [( P v ⊥ v f ) f ] − τ ∆ v f ) , local aligment K ( | x j − x k | /ǫ ) gives the pressure term near local aligment K ( | x j − x k | / √ ǫ ) gives viscosity term near local van Der Waals potential �� R n × S n − 1 φ ( | x − y | / √ ǫ )( f ( y , v , t ) − f ( x , u , t )) dydv Φ( x , u ) = induced a capillary force ∂ t ρ + c 1 ∇ x · ( ρ Ω) = 0 , ρ ( ∂ t Ω + c 2 Ω · ∇ x Ω) + τ P Ω ⊥ ∇ x ρ = c 3 P Ω ⊥ ∆( ρ Ω) + c 4 P Ω ⊥ ∇ x ∆ ρ,
Symmetrization viscous hyperbolic system √ p ′ ( ρ ) ρ = a ( ρ ), a ′ ( ρ ) = In 2D, we set Ω = (cos ϕ, sin ϕ ), ˆ , ρ ρ ) = a ′ ( ρ ) ρ , h (ˆ λ (ˆ ρ ) = 2 ln ρ . Then the system recast as ρ ) (Ω ⊥ · ∇ x ) ϕ = 0 ( ∂ t + Ω · ∇ x )ˆ ρ + λ (ˆ ρ ) (Ω ⊥ · ∇ x )ˆ ( ∂ t + c Ω · ∇ x ) ϕ + λ (ˆ ρ = µ (∆ ϕ + ∇ x h (ˆ ρ ) · ∇ x ϕ ) . local classical solution
Flocking of self propelled particles, Vicsek et al PRL ’95 time-discrete model t n = n ∆ t , k -th individual x n k : position at t n v n k : velocity with | v n k | = 1. x n +1 = x n k + v n k ∆ t k alignment to local mean velocity k = � N v n j =1 ψ ( | x j − x k | ) v n ¯ j + noise v n +1 v n v n = ¯ k / | ¯ k | k Degond-Motsch ’08 x k = v k ˙ v k = � N ¯ j =1 ψ ( | x j − x k | ) v j R ω k ω k = ¯ v k / | ¯ v k | √ X k d v k = (Id − v k ⊗ v k )( λ ( ρ k ) ω k dt + 2 τ dB t ) We take λ = λ k = | ¯ v k |
Vicsek model and phase transition Order parameter/mean speed | J ( f ) | and variance 1 − | J ( f ) | 2 a) High noise, low density: particles moved independently b) Low noise, low density: particles formed groups that were independent c) High noise, high density: particles moved with some correlations d) Low noise, high density: all particles moved in the same direction Above are two plots from [5] showing the increase of the scaling region as N is increased.
Paramagnetism to ferromagnetism phase transition near Curie temperature
Dynamics of orientational alignment oriented particles { ω j } N j =1 ⊂ S n − 1 , unit sphere in R n dynamics of orientational alignment, for k = 1 , · · · , N √ 2 τ (Id − ω k ⊗ ω k ) ◦ d B k d ω k = (Id − ω k ⊗ ω k ) J ( t ) d t + t , � N J ( t ) = 1 j =1 ω j ( t ). N Stochastic integral is in the Stratonovich sense. B t Brownian motion in R n (Id − ω ⊗ ω ) ◦ d B t = d W t , Brownian motion on sphere √ 2 DdB t ν ¯ ω k dt ω k dω k ¯ ω k S 1
Dynamics of orientational alignment in 2D, ω k ( t ) = e i θ k ( t ) , √ d θ k = sin(¯ 2 σ d B k θ ( t ) − θ k ) d t + t , N � θ ( t )) = 1 sin(¯ sin( θ j ( t )) N j =1 connected to Kuramoto nonlinear oscillator θ k = Ω k + sin(¯ ˙ θ ( t ) − θ k ) , and Synchronization. S.-Y. Ha’s talk on Monday
Standard deviation and Order Parameter | ¯ v | Standard deviation: N N N � � � v = 1 v | 2 = 1 v = 1 | v k | 2 − | ¯ σ 2 v | 2 , | v k − ¯ ¯ v k N N N k =1 k =1 k =1 If | v k | = 1, then σ 2 v | 2 , v = 1 − | ¯ Measures alignment S 1 ω k ω k S 1 α ∼ 1 α � 1 α ∼ 1 : ω aligned α � 1 : ω random
Mean field equation, Fokker-Planck eq, Smoluchowski eq potential ψ ( ω, t ) = − ω · J ( t ), least potential if ω aligns to J identity: (Id − ω ⊗ ω ) J = −∇ ω ψ recast as steepest descent motion: √ 2 τ d W k d ω k = −∇ ω ψ ( ω k ) d t + t probability density function, f ( ω, t ) , ω ∈ S n − 1 , mean field equation (Fokker-Planck eq, Smoluchowski eq), � � S n − 1 f ( ω, t ) = 1 = S n − 1 d ω d = τ ∂ t f = d ∆ ω f + ∇ ω ( f ∇ ω ψ ) := Q ( f ) , ρ � ψ ( ω, t ) = − ω · J ( t ) , J ( t ) = S n − 1 ω f ( ω, t ) , interaction kernel � S n − 1 K ( ω, ω ′ ) f ( ω ′ , t ) , K ( ω, ω ′ ) = − ω · ω ′ ψ ( ω, t ) =
Free energy-dissipation relation free energy: � � S n − 1 f ln f + 1 F ( f ) = d S n − 1 ψ f . 2 chemical potential ψ µ = δ F δ f = d ln f + ψ, v = −∇ ω µ = − d ∇ ω ln f − ∇ ω ψ, recast as the continuity equation (Doi 1981, Hess 1976): f t + ∇ ω · ( f v ) = 0 , dissipation of free energy: � S n − 1 f |∇ ω µ | 2 . ∂ t F + D = 0 , D ( f ) =
Onsager theory on orientational phase transition, 1949 recall free energy: � � � S n − 1 f ln f +1 S n − 1 K ( ω, ω ′ ) f ( ω ′ ) F ( f ) = d S n − 1 ψ f , ψ ( ω ) = 2 K ( ω, ω ′ ) = | ω × ω ′ | , Onsager : excluded volume potential for rodlike polymers K ( ω, ω ′ ) = | ω × ω ′ | 2 = 1 − ( ω · ω ′ ) 2 , Maier-Saupe kernel K ( ω, ω ′ ) = − ω · ω ′ , Dipolar interaction kernel . K ( ω, ω ′ ) = − αω · ω ′ − β ( ω · ω ′ ) 2 , magnetic rod suspension equilibria f eq are given by � minimizing F ( f ) subject to S n − 1 f = 1 phase transition in equilibria probability density function near critical temperature/noise level or critical mass
Critical parameter d c = 1 n and Linear stability κ → ∞ c ( κ ) κ → 0 1 Around the constant state : f = 1 + g . n σ g ) ω · J [ g ] − ✭✭✭✭✭✭✭✭✭✭✭ ∂ t g = d ∆ ω g + ( n − 1)(1 + ✓ (Id − ω ⊗ ω ) J [ g ] · ∇ ω g , ✘✘✘✘✘✘✘✘✘✘✘ � 1 � � d d t J [ g ] = ( n − 1) n − d J [ g ] + S n − 1 (Id − ω ⊗ ω ) J [ g ] g Linearly stable when d > d c , unstable when d < d c .
Characterization of equilibria Proposition The steady states to the Fokker- Planck eq. are probability measures f on S n − 1 satisfy one of the following equivalent conditions equilibrium: f ∈ C 2 ( S n − 1 ) and Q ( f ) = 0 no dissipation, f ∈ C 1 ( S n − 1 ) and D ( f eq ) = 0 critical states: f ∈ C 0 ( S n − 1 ) and critical point of F ( f ) � subject to S n − 1 f = 1 . δ F δ f = µ ( Lagrange multiplier, a constant ) Gibbs/Boltzmann states: f positive, symmetric, analytic µ = δ F δ f = d ln f − J [ f ] · ω = constant ( chemical potential )
Characterization of equilibria: Von Mises-Fisher distribution, 1953 recall equilibria (Gibbs/Boltzmann states) are given by d ln f − J [ f ] · ω = C . Denote J [ f ] = | J ( f ) | Ω, Ω ∈ S n − 1 f = Z − 1 exp( κ ω · Ω) , κ = | J ( f ) | / d Von Mises-Fisher distribution with concentration parameter κ � 0: � M κ Ω ( ω ) = Z − 1 exp( κ ω · Ω) , Z = S n − 1 exp( κ ω · Ω) . Compatibility equation for κ : � π 0 cos θ e κ cos θ sin n − 2 θ d θ | J [ M κ Ω ] | = κ d = c ( κ ) := � π . 0 e κ cos θ sin n − 2 θ d θ 0 � c ( κ ) � 1, order parameter/mean speed for equilibria
Characterization of equilibria ( d > 0): two phases Lemma Let β = c ( κ ) 2 + nc ( κ ) − 1 . For any κ > 0 , we have β > 0 . κ The function κ �→ c ( κ ) (= d for the compatibility equation) is κ decreasing (its derivative is − β κ ), starting from 1 n at 0. If d � d c , only one solution to compatibility equation: κ = 0. Equilibrium : constant state 1 (disordered phase). If d < d c , either κ = 0 or κ is the unique positive solution of the compatibility equation (ordered phase M κ Ω , Ω ∈ S n − 1 ). Near the critical value of d c = 1 / n , � c ( κ ( d )) ∼ ( n + 2)( d c − d ). Proposition Any steady state to Fokker- Planck equation is of the above forms
Recommend








More recommend
Explore More Topics
Stay informed with curated content and fresh updates.