
Upstream Forcing of Tidewater Glacier Retreat Ian Hewitt , University - PowerPoint PPT Presentation
Upstream Forcing of Tidewater Glacier Retreat Ian Hewitt , University of Oxford Tidewater glaciers currently discharge around half of Greenlands ice loss to the ocean, and can change rapidly. Central question: what controls ice discharge? and,
Upstream Forcing of Tidewater Glacier Retreat Ian Hewitt , University of Oxford Tidewater glaciers currently discharge around half of Greenland’s ice loss to the ocean, and can change rapidly. Central question: what controls ice discharge? and, related to that, what determines the location of the ice front? Summary Certain positions of the ice front act as ‘ pinning points ’, at which the glacier achieves a roughly steady balance (accumulation ≈ discharge). Changes in forcing can cause such points to disappear or lose stability. The highly non-linear response is inherent to the dynamics of tidewater glaciers, whether forcing is from the ocean or from upstream. I’ll describe a simplified model that helps elucidate this.
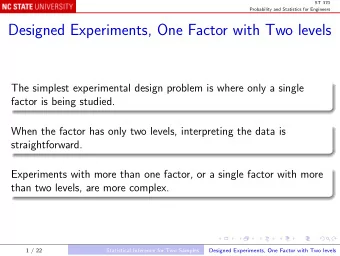
Motivation: impact of subglacial lubrication Drainage of surface meltwater to the bed affects ice speed (due to influence on water pressure). Possibility that increased surface melt could cause increased ice speeds, and consequently (perhaps?) ice loss. Zwally et al 2002 Some recent studies suggest increased surface melt may km 50 0 10 20 Greenland have caused a slight decrease in average ice speeds 40 (due to more efficient subglacial drainage). 30 68.6° N C 20 B A 10 1 1 Change (%) , , 0 2 0 0 What impact do we expect such changes to have 0 0 0 8 6 0 0 0 0 on a tidewater glacier? –10 1,200 a –20 Area (km 2 ) 800 67.9° N 400 0 –30 –30 0 30 Change (%) 10 b Change (%) 0 –40 –10 –20 –30 400 600 800 1,000 –50 Elevation (m.a.s.l.) 51° W 50° W 49° W Tedstone et al 2015 c d
Ice front evolution ⇡ � r a � m margin ice flux calving + frontal melting Kinematic condition � d t = q m � q c d x m = q m � q c h m d t h m ice volume V x m Primary control on discharge is ice depth at the margin. It is typically observed that q m ⇡ q c Z
Ice front evolution ⇡ � r a � m margin ice flux Kinematic condition calving + frontal melting = q m � d t � q c d x m = q m � q c h m d t h m h m ice volume V x m Primary control on discharge is ice depth at the margin. It is typically observed that q m ⇡ q c Z
Ice front evolution ⇡ � r a � m margin ice flux Kinematic condition calving + frontal melting = q m � d t � q c d x m = q m � q c h m d t h m h m Z ice volume V Global mass balance d V x m Z d t = q b � q c Z Z x m Primary control on discharge is ice depth at the margin. q b = ( a � m ) d x balance flux 0 It is typically observed that q m ⇡ q c ✓ ◆ Z
Time-lapse movie Extreme Ice Survey - Time-lapse camera Columbia Glacier, Alaska
Time-lapse movie Extreme Ice Survey - Time-lapse camera Columbia Glacier, Alaska
✓Z ◆ A simplified model of a tidewater glacier ∂ h ∂ t + ∂ q ✓Z ◆ = a q = hu Mass conservation ∂ x = a − m ◆ ✓ ◆ 4 η i h ∂ u ∂ − ρ i gh ∂ ✓ ◆ z = s e Force balance ∂ x ( b + h ) − τ b = 0 m h ∂ x ∂ x � q c ◆ z 4 η i h ∂ u ∂ x = 1 ρ i gh 2 − ρ o gb 2 � � at x = x m At ice front (stress balance) x 2 z = b τ b = µN x m ◆ ✓ ◆ − ρ o h = f b (calving criteria) ✓Z ✓ ◆ ρ i Two-dimensional. Ice motion dominated by basal sliding. flotation depth flotation factor A plastic (rate-independent) friction law.
✓Z ◆ A simplified model of a tidewater glacier ∂ h ∂ t + ∂ q ✓Z ◆ = a q = hu Mass conservation ∂ x = a − m ◆ ✓ ◆ 4 η i h ∂ u ∂ − ρ i gh ∂ ✓ ◆ z = s e Force balance ∂ x ( b + h ) − τ b = 0 m h ∂ x ∂ x � q c ◆ z 4 η i h ∂ u ∂ x = 1 ρ i gh 2 − ρ o gb 2 � � at x = x m At ice front (stress balance) x 2 z = b τ b = µN x m ◆ ✓ ◆ − ρ o h = f b (calving criteria) ✓Z ✓ ◆ ρ i Two-dimensional. Ice motion dominated by basal sliding. flotation depth flotation factor A plastic (rate-independent) friction law. Away from the front, force balance − ρ i gh ∂ ∂ x ( b + h ) ≈ τ b Model reduction ice thickness and volume determined purely by margin position and basal friction cf. Nye 1951, Weertman 1961, Ultee & Bassis 2016
✓Z ◆ A simplified model of a tidewater glacier ∂ h ∂ t + ∂ q ✓Z ◆ = a q = hu Mass conservation ∂ x = a − m ◆ ✓ ◆ 4 η i h ∂ u ∂ − ρ i gh ∂ ✓ ◆ z = s e Force balance ∂ x ( b + h ) − τ b = 0 m h ∂ x ∂ x � q c ◆ z 4 η i h ∂ u ∂ x = 1 ρ i gh 2 − ρ o gb 2 � � at x = x m At ice front (stress balance) x 2 z = b τ b = µN x m ◆ ✓ ◆ − ρ o h = f b (calving criteria) ✓Z ✓ ◆ ρ i Two-dimensional. Ice motion dominated by basal sliding. flotation depth flotation factor A plastic (rate-independent) friction law. Away from the front, force balance − ρ i gh ∂ ∂ x ( b + h ) ≈ τ b Model reduction ice thickness and volume determined purely by margin position and basal friction cf. Nye 1951, Weertman 1961, Ultee & Bassis 2016 ✓ ◆ 1 Near the front, a boundary-layer analysis relates calving flux to local water depth 10 4 × ˜ Q 0.8 10 3 × ˆ Q cf. Schoof 2007, Tsai et al 2015 0.6 ◆ n +2 Q ) n ˆ q c = A (2 ρ i g ) n ˆ ✓ − ρ i 0.4 ˆ Q ( f ) b Q ( f ) 0.2 µ ρ o 0 1 1.05 1.1 1.15 1.2 f
A simplified model of a tidewater glacier d x m = F ( x m ) d t z = s e � q c ◆ ✓ ◆ − ρ o = f b ρ i = x m τ b = µN x m ✓ ◆ Z Global mass balance d V d x m Stable equilibria d t = q b − q c = F ( x m ; N, s e , f ) d t
A simplified model of a tidewater glacier d x m = F ( x m ) d t z = s e � q c ◆ ✓ ◆ − ρ o = f b ρ i = x m τ b = µN x m ✓ ◆ Z Global mass balance d V d x m Stable equilibria d t = q b − q c = F ( x m ; N, s e , f ) d t Forcing parameters: µN Bed strength ◆ N, s e Equilibrium line altitude (ELA) Calving parameter = f
Motivation: impact of subglacial lubrication Velocity Steady state Decreasing basal friction Increasing basal friction Time Slow down Speed up Advance Retreat Increased mass loss Speed up Greater mass loss
A simplified model of a tidewater glacier d x m = F ( x m ) d t z = s e � q c ◆ ✓ ◆ − ρ o = f b ρ i = x m τ b = µN x m ✓ ◆ Z Global mass balance d V d x m Stable equilibria d t = q b − q c = F ( x m ; N, s e , f ) d t Forcing parameters: µN Bed strength ◆ N, s e Equilibrium line altitude (ELA) Calving parameter = f
A simplified model of a tidewater glacier d x m = F ( x m ) d t Decrease basal friction z = s e � q c ◆ ✓ ◆ − ρ o = f b ρ i = x m τ b = µN x m ✓ ◆ Z Global mass balance d V d x m Stable equilibria d t = q b − q c = F ( x m ; N, s e , f ) d t Forcing parameters: µN Bed strength ◆ N, s e Equilibrium line altitude (ELA) Calving parameter = f
A simplified model of a tidewater glacier d x m = F ( x m ) d t z = s e � q c ◆ ✓ ◆ − ρ o = f b ρ i = x m τ b = µN x m ✓ ◆ Z Global mass balance d V d x m Stable equilibria d t = q b − q c = F ( x m ; N, s e , f ) d t Forcing parameters: µN Bed strength ◆ N, s e Equilibrium line altitude (ELA) Calving parameter = f
A simplified model of a tidewater glacier d x m = F ( x m ) d t Increase basal friction z = s e � q c ◆ ✓ ◆ − ρ o = f b ρ i = x m τ b = µN x m ✓ ◆ Z Global mass balance d V d x m Stable equilibria d t = q b − q c = F ( x m ; N, s e , f ) d t Forcing parameters: µN Bed strength ◆ N, s e Equilibrium line altitude (ELA) Calving parameter = f
A simplified model of a tidewater glacier d x m = F ( x m ) d t z = s e � q c ◆ ✓ ◆ − ρ o = f b ρ i = x m τ b = µN x m ✓ ◆ Z Global mass balance d V d x m Stable equilibria d t = q b − q c = F ( x m ; N, s e , f ) d t Forcing parameters: µN Bed strength ◆ N, s e Equilibrium line altitude (ELA) Calving parameter = f
A simplified model of a tidewater glacier d x m = F ( x m ) d t Increase calving or increase ELA z = s e � q c ◆ ✓ ◆ − ρ o = f b ρ i = x m τ b = µN x m ✓ ◆ Z Global mass balance d V d x m Stable equilibria d t = q b − q c = F ( x m ; N, s e , f ) d t Forcing parameters: µN Bed strength ◆ N, s e Equilibrium line altitude (ELA) Calving parameter = f
A simplified model of a tidewater glacier d x m = F ( x m ) d t z = s e � q c ◆ ✓ ◆ − ρ o = f b ρ i = x m τ b = µN x m ✓ ◆ Z Global mass balance d V d x m Stable equilibria d t = q b − q c = F ( x m ; N, s e , f ) d t Forcing parameters: µN Bed strength ◆ N, s e Equilibrium line altitude (ELA) Calving parameter = f
Response to different forcing An essentially indistinguishable response can occur to very distinct forcing mechanisms. Increased calving Increased ELA Increased bed strength 0 y 0 y 0 y Velocity [m/y] Velocity [m/y] Velocity [m/y] Elevation [m] Elevation [m] Elevation [m] 50 y 50 y 50 y 100 y 100 y 100 y 1000 500 1000 500 1000 500 200 y 200 y 200 y -20 -20 -20 -40 -40 -40 0 0 0 0 0 0 -60 -60 -60 100 150 200 100 150 200 100 150 200 Distance [km] Distance [km] Distance [km]
Summary Tidewater glaciers can be described as a forced dynamical system. Episodic acceleration and deceleration of a tidewater glacier is generic , in response to changes in both oceanic and upstream forcing. d x m = F ( x m ) d t = x m
Recommend





More recommend
Explore More Topics
Stay informed with curated content and fresh updates.