The Cayley-Hamilton Theorem For Finite Automata Radu Grosu SUNY at - PowerPoint PPT Presentation
The Cayley-Hamilton Theorem For Finite Automata Radu Grosu SUNY at Stony Brook How did I get interested in this topic? Convergence of Theories Hybrid Systems Computation and Control: - convergence between control and automata theory.
The Cayley-Hamilton Theorem For Finite Automata Radu Grosu SUNY at Stony Brook
How did I get interested in this topic?
Convergence of Theories • Hybrid Systems Computation and Control: - convergence between control and automata theory. • Hybrid Automata: an outcome of this convergence - modeling formalism for systems exhibiting both discrete and continuous behavior, - successfully used to model and analyze embedded and biological systems.
Lack of Common Foundation for HA v V • Mode dynamics: x Ax Bu E v Cx - Linear system (LS) v V R • Mode switching: voltage(mv) v / V t 0 R - Finite automaton (FA) v V • Different techniques: U Stimulated - LS reduction s v V s / di t - FA minimization U time(ms) • LS & FA taught separately: No common foundation!
Main Conjecture • Finite automata can be conveniently regarded as time invariant linear systems over semimodules: - linear systems techniques generalize to automata • Examples of such techniques include: - linear transformations of automata, - minimization and determinization of automata as observability and reachability reductions - Z-transform of automata to compute associated regular expression through Gaussian elimination.
Minimal DFA are Not Minimal NFA (Arnold, Dicky and Nivat’s Example) b a b b x 3 x 2 a x 1 x 2 x 1 c c x 4 x 3 c a L = a (b* + c*)
Minimal NFA: How are they Related? (Arnold, Dicky and Nivat’s Example) c a b a x 2 x 2 b c a b a b x 1 x 3 x 5 x 1 x 3 x 5 c c a a b c x 4 x 4 c b L = ab+ac + ba+bc + ca+cb No homomorphism of either automaton onto the other.
Minimal NFA: How are they Related? (Arnold, Dicky and Nivat’s Example) c a b a x 2 x 5 b c a b a b x 1 x 3 x 8 x 1 x 6 x 8 c c a a b c x 4 x 7 c b Carrez’s solution: Take both in a terminal NFA. Is this the best one can do? No! One can use use linear (similarity) transformations.
Observability Reduction HSCC’09 (Arnold, Dicky and Nivat’s Example) c a b a x 2 x 23 A A b c a b a b x 1 x 3 x 5 x 1 x 24 x 5 c c a a b c x 4 x 34 c b Define linear transformation x t = x t T: x 1 x 2 x 3 x 4 x 5 A = [AT] T (T 1 AT) x 1 1 0 0 0 0 x 2 0 1 1 0 0 t = x 0 T t T x 0 x 3 0 1 0 1 0 x 4 0 0 1 1 0 C = [C] T (T 1 C) x 5 0 0 0 0 1
Reachability Reduction HSCC’09 (Arnold, Dicky and Nivat’s Example) b a c a x 2 x 23 A A b c a b b a x 1 x 3 x 5 x 1 x 24 x 5 c c a c a b x 4 x 34 b c Define linear transformation x t = x t T: x 1 x 2 x 3 x 4 x 5 A t = [A t T] T (T 1 A t T) x 1 1 0 0 0 0 x 2 0 1 1 0 0 t = x 0 T t T x 0 x 3 0 1 0 1 0 x 4 0 0 1 1 0 C = [C] T (T 1 C) x 5 0 0 0 0 1
Observability and minimization
Finite Automata as Linear Systems Consider a finite automaton M = (X, , ,S,F) with: - finite set of states X, finite input alphabet , - transition relation X X, - starting and final sets of states S,F X
Finite Automata as Linear Systems Consider a finite automaton M = (X, , ,S,F) with: - finite set of states X, finite input alphabet , - transition relation X X, - starting and final sets of states S,F X Let X denote row and column indices. Then: - defines a matrix A , - S and F define corresponding vectors
Finite Automata as Linear Systems Now define the linear system L M = [S,A,C]: t (n+1) = x t (n)A, x 0 x = S t (n) t (n)C, C = F y = x
Finite Automata as Linear Systems Now define the linear system L M = [S,A,C]: t (n+1) t (n)A, x = x x 0 = S t (n) t (n)C, y = x C = F Example: consider following automaton: 0 a b A = b a 0 a 0 0 0 b b a x 3 x 1 x 2 0 x 0 = C = 0 0
Semimodule of Languages ( * ) is an idempotent semiring (quantale): - ( ( * ) ,+,0) is a commutative idempotent monoid (union), - ( ( * ) , ,1) is a monoid (concatenation), - multiplication distributes over addition, - 0 is an annihilator: 0 a = 0 ( ( * )) n is a semimodule over scalars in ( * ) : - r(x+y) = rx + ry, (r+s)x = rx + sx, (rs)x = r(sx), - 1x = x, 0x = 0 Note: No additive and multiplicative inverses!
Semimodule of Languages ( * ) is an idempotent semiring (quantale): - ( ( * ) ,+,0) is a commutative idempotent monoid (union), - ( ( * ) , ,1) is a monoid (concatenation), - multiplication distributes over addition, - 0 is an annihilator: 0 a = 0 ( ( * )) n is a semimodule over scalars in ( * ) : - r(x+y) = rx + ry, (r+s)x = rx + sx, (rs)x = r(sx), - 1x = x, 0x = 0 Note: No additive and multiplicative inverses!
Observability Let L = [S,A,C]. Observe its output upto n-1: t [ C AC ... A n-1 C] = x 0 t O (1) [y(0) y(1) ... y(n-1)] = x 0 If L operates on a vector space: - L is observable if: x 0 is uniquely determined by (1) , - Observability matrix O: has rank n, n C = s 1 A n-1 C + s 2 A n-2 C + ... + s n C - n-outputs suffice: A If L operates on a semimodule: - L is observable if: x 0 is uniquely determined by (1)
Observability Let L = [S,A,C]. Observe its output upto n-1: t [ C AC ... A n-1 C] = x 0 t O (1) [y(0) y(1) ... y(n-1)] = x 0 If L operates on a vector space: - L is observable if: x 0 is uniquely determined by (1) , - Observability matrix O: has rank n, n C = s 1 A n-1 C + s 2 A n-2 C + ... + s n C - n-outputs suffice: A (Cayley-Hamilton Theorem) If L operates on a semimodule: - L is observable if: x 0 is uniquely determined by (1)
Observability Let L = [S,A,C]. Observe the output upto n-1: t [ C AC ... A n-1 C] = x 0 t O (1) [y(0) y(1) ... y(n-1)] = x 0 If L operates on a vector space: - L is observable if: x 0 is uniquely determined by (1) , - Observability matrix O: has rank n, n C = s 1 A n-1 C + s 2 A n-2 C + ... + s n C - n-outputs suffice: A If L operates on a semimodule: - L is observable if: x 0 is uniquely determined by (1)
The Cayley-Hamilton Theorem ( A n = s 1 A n-1 + s 2 A n-2 + ... + s n I )
Permutations Permutations are bijections of {1,...,n}: - Example: = {(1,2),(2,3),(3,4),(4,1),(5,7),(6,6),(7,5)} The graph G( ) of a permutation : - G( ) decomposes into: elementary cycles, The sign of a permutation: - Pos/Neg: even/odd number of even length cycles, / P : all positive/negative permutations. - P n n
Permutations Permutations are bijections of {1,...,n}: - Example: = {(1,2),(2,3),(3,4),(4,1),(5,7),(6,6),(7,5)} The graph G( ) of a permutation : - G( ) decomposes into: elementary cycles 1 2 5 6 7 4 3 The sign of a permutation: - Pos/Neg: even/odd number of even length cycles / P : all positive/negative permutations. - P n n
Permutations Permutations are bijections of {1,...,n}: - Example: = {(1,2),(2,3),(3,4),(4,1),(5,7),(6,6),(7,5)} The graph G( ) of a permutation : - G( ) decomposes into: elementary cycles 1 2 5 6 7 4 3 The sign of a permutation : - Pos/Neg: even/odd number of even length cycles / P : all positive/negative permutations - P n n
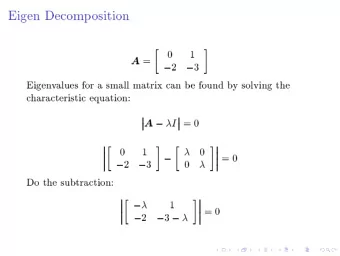
Eigenvalues in Vector Spaces The eigenvalues of a square matrix A: - Eigenvector equation: x t A = x t s The characteristic equation of A: eigenvector eigenvalue - The characteristic polynomial: cp A ( s ) = | s I-A| - The characteristic equation: cp A ( s ) = 0 The determinant of A: ( A ) ( A ) - The determinant: |A| = - , P n P n n - Permutation application: (A) = A(i, (i)) i 1
Matrix-Eigenspaces in Vector Spaces The eigenvalues of a square matrix A: - Eigenvector equation: x t ( s I-A ) = 0 The characteristic equation of A: - The characteristic polynomial: cp A ( s ) = | s I-A | - The characteristic equation: cp A ( s ) = 0 The determinant of A: ( A ) ( A ) - The determinant: |A| = - , P n P n n - Permutation application: (A) = A(i, (i)) i 1
Matrix-Eigenspaces in Vector Spaces The eigenvalues of a square matrix A: - Eigenvector equation: x t ( s I-A) = 0 The characteristic equation of A: - The characteristic polynomial: cp A ( s ) = | s I-A| - The characteristic equation: cp A ( s ) = 0 The determinant of A: ( A ) ( A ) - The determinant: |A| = - , P n P n n - Permutation application: (A) = A(i, (i)) i 1
Matrix-Eigenspaces in Vector Spaces The eigenvalues of a square matrix A: - Eigenvector equation: x t ( s I - A ) = 0 The characteristic equation of A: - The characteristic polynomial: cp A ( s ) = | s I-A| - The characteristic equation: cp A ( s ) = 0 The determinant of A: ( A ) ( A ) - The determinant: |A| = - , P n P n n - Weight of a permutation: (A) = A(i, (i)) i 1
Recommend




More recommend
Explore More Topics
Stay informed with curated content and fresh updates.