Review of Hydraulic Stimulation Technology R. Jung, F. Rummel - PowerPoint PPT Presentation
Review of Hydraulic Stimulation Technology R. Jung, F. Rummel ENGINE Workshop 3 Ittingen 29./30.06.2006 Mechanical properties of fractures 2 a pressure volume Mechanical properties of fractures 2 a 2a dw/dp dV/dp [m] [mm/bar]
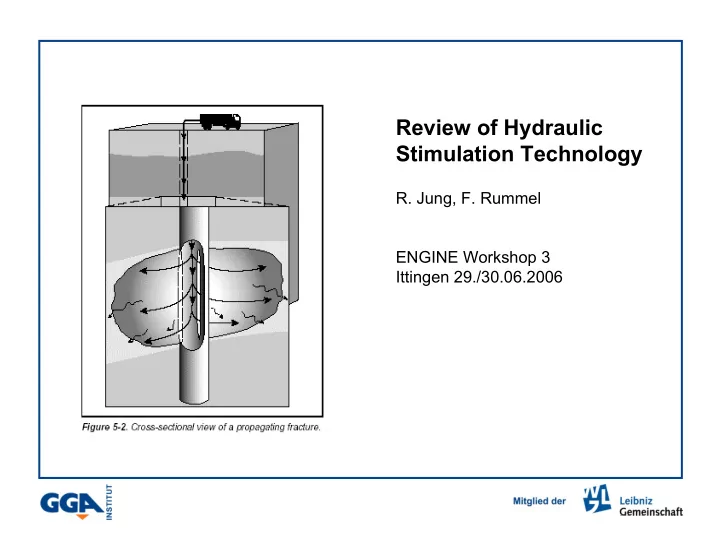
Review of Hydraulic Stimulation Technology R. Jung, F. Rummel ENGINE Workshop 3 Ittingen 29./30.06.2006
Mechanical properties of fractures 2 a pressure volume
Mechanical properties of fractures 2 a 2a dw/dp dV/dp [m] [mm/bar] [m³/bar] 1 0.003 3 · 10 -6 10 0.03 0.003 100 0.3 3 1000 3 3000 in contact 0.001-0.01 E = 50 GPa
Mechanical properties of fractures 2 a 2 a + 2 ∆ a pressure volume
Fracture propagation 2 a 2 a + 2 ∆ a Griffith (1921) ∆ W pressure ∆ W ≥ 2 ∆ a· γ γ : surface energy volume γ = 10 – 100 J/m²
Fracture propagation 2 a σ θ ∝ K I / √ r r K I = p · √ π a Irvin (1958) K IC : fracture toughness K I = K IC K IC = 1 MPa·m 1/2
fluid flow in fractures w q = (w 3 /12)/µ·dp/dx = T/µ·dp/dx T : fracture transmissibility µ : viscosity
fluid flow in fractures w q = (w 3 /12)/µ·dp/dx = T/µ·dp/dx w T T [mm] [m³] [D·m] 10 -16 10 -4 0.01 0.1 10 -13 0,1 10 -10 1 100 10 -7 10 5 10 Porous aquifer 10 -11 10
fluid flow in fractures w dp/dx = q·µ/T w q dp/dx [mm] [l/(s · m)] [bar/m] 10 5 0.01 1 0.1 1 100 1 1 0.1 10 -4 10 1
fluid flow in fractures 2 a High gradients at the fracture tip
Hydrodynamic fracture models x << x >> h h f f f f Khristianovich, Zheltov, Geertsma, de Klerk (KGD) Perkins, Kern, and Nordgren (PKN) Model Geometry Model Geometry
Hydrodynamic fracture models KGD fracture model (1955, 1969) 1 / 4 ⋅ µ ⋅ − ν ⋅ 2 q ( 1 ) x π i f = ⋅ w 2 , 27 ⋅ G h 4 f x << h E f f = G = elastic shear modulus, Pa G ⋅ + ν 2 ( 1 ) q i = injection rate, m³/s µ = apparent viscosity, Pa·s E = Young‘s modulus, Pa ν = Poisson’s ratio x f = fracture half length, m h f = Fracture height, m
Hydrodynamic fracture models PKN fracture model 1 / 4 ⋅ µ ⋅ − ν ⋅ q ( 1 ) x π = ⋅ i f ⋅ γ w 2 , 31 G 4 x >> h f f E = G G = elastic shear modulus, ⋅ + ν 2 ( 1 ) q i = injection rate µ = apparent viscosity q i = injection rate, bpm (10 7 - 2x10 5 psi) E = Young‘s modulus µ = apparent viscosity, cp ν = Poisson’s ratio (0,15 - 0,4) G = elastic shear modulus, psi x f = fracture half length x f = fracture half length, ft γ = geometry factor app. 0,75
Hydrodynamic fracture models Comparision with static fracture models 2a Griffith KDG [m] w c , [mm] w c , [mm] 1 0.025 0.4 10 0.075 1.2 100 0.25 4 1000 0.75 12 q = 1 l/(s·m) water
Fluid losses C L = fluid loss coefficient A = element of fracture area t = time measured from pump start τ = time measured from creation of A ⋅ ⋅ 2 C A = q L L − τ t
Fluid losses V olume injected = created fracture volume + fluid leak off q i = injection rate = + t i = injection time V V V i f L A f = fracture area w = average fracture width ⋅ = ⋅ + ⋅ ⋅ ⋅ ⋅ ⋅ q t A w K C ( 2 A ) r t i i f L L f p i C L = leakoff coefficient r p = ratio of net to fracture height 1 8 ⋅ η + π ⋅ − η (Nolte) ( 1 ) K L = 2 3 V f η = fluid efficiency = V i V pad = pad volume not carrying proppants
post frac tests T D = T/k·x f x f Q = 0.1 l/(s·m) T T D = 0.1 k,s
post frac tests Test 08h 30000000 25000000 20000000 Pa 15000000 10000000 5000000 0 1 10 100 1000 10000 100000 s T D = 0.1
post frac tests T D = T/k·x f x f Q = 0.1 l/(s·m) T T D = 1 k,s
post frac tests Test 08c 16000000 14000000 12000000 10000000 Pa 8000000 6000000 4000000 2000000 0 0,00 2,00 4,00 6,00 8,00 10,00 12,00 14,00 16,00 18,00 s^(1/4) T D = 1
post frac tests T D = T/k·x f x f Q = 0.1 l/(s·m) T T D = 10 k,s
post frac tests Test 08 g 12000000 10000000 8000000 Pa 6000000 4000000 2000000 0 0,00 2,00 4,00 6,00 8,00 10,00 12,00 14,00 16,00 18,00 s^(1/4) T D = 10
Recommend




More recommend
Explore More Topics
Stay informed with curated content and fresh updates.