Recapitulation: Expected Measurements innovation statistics, - PowerPoint PPT Presentation
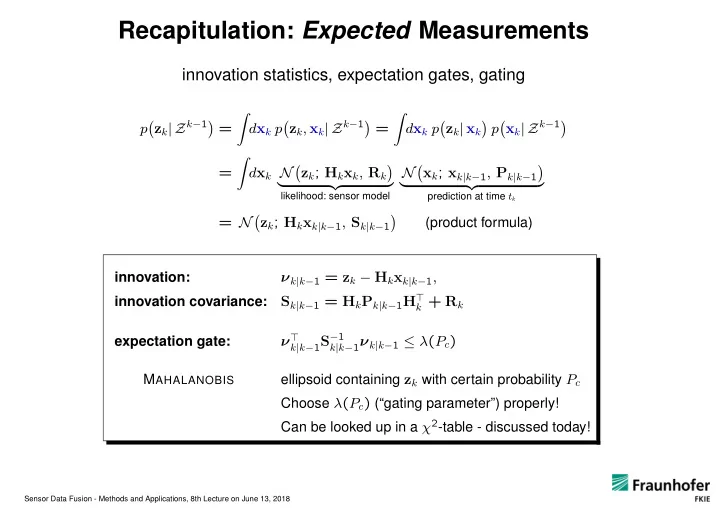
Recapitulation: Expected Measurements innovation statistics, expectation gates, gating Z Z p z k | Z k 1 d x k p z k , x k | Z k 1 d x k p z k | x k p x k | Z k 1 = = Z = d x k
Recapitulation: Expected Measurements innovation statistics, expectation gates, gating Z Z p � z k | Z k � 1 � d x k p � z k , x k | Z k � 1 � d x k p � z k | x k � p � x k | Z k � 1 � = = Z � � � � = d x k N z k ; H k x k , R k N x k ; x k | k � 1 , P k | k � 1 | {z } | {z } likelihood: sensor model prediction at time t k � � = N z k ; H k x k | k � 1 , S k | k � 1 (product formula) innovation: ν k | k � 1 = z k � H k x k | k � 1 , S k | k � 1 = H k P k | k � 1 H > innovation covariance: k + R k k | k � 1 S � 1 ν > k | k � 1 ν k | k � 1 � ( P c ) expectation gate: M AHALANOBIS ellipsoid containing z k with certain probability P c Choose � ( P c ) (“gating parameter”) properly! Can be looked up in a � 2 -table - discussed today! Sensor Data Fusion - Methods and Applications, 8th Lecture on June 13, 2018
Sensor data of uncertain origin • prediction: x k | k � 1 , P k | k � 1 (dynamics) • expected plot: z k ⇠ N ( Hx k | k � 1 , S k ) • ν k ⇠ N (0 , S k ) , S k = HP k | k � 1 H > + R • innovation: ν k = z k � Hx k | k � 1 , white • Mahalanobis norm: || ν k || 2 = ν > k S � 1 • gating: || ν k || < � , P c ( � ) correlation prob. k ν k missing/false plots, measurement errors, scan rate, agile targets: large gates Sensor Data Fusion - Methods and Applications, 8th Lecture on June 13, 2018
Sensor Data Fusion - Methods and Applications, 8th Lecture on June 13, 2018
Sensor Data Fusion - Methods and Applications, 8th Lecture on June 13, 2018
Sensor Data Fusion - Methods and Applications, 8th Lecture on June 13, 2018
Sensor Data Fusion - Methods and Applications, 8th Lecture on June 13, 2018
Sensor Data Fusion - Methods and Applications, 8th Lecture on June 13, 2018
Sensor Data Fusion - Methods and Applications, 8th Lecture on June 13, 2018
Sensor Data Fusion - Methods and Applications, 8th Lecture on June 13, 2018
Sensor Data Fusion - Methods and Applications, 8th Lecture on June 13, 2018
Sensor Data Fusion - Methods and Applications, 8th Lecture on June 13, 2018
Sensor Data Fusion - Methods and Applications, 8th Lecture on June 13, 2018
Sensor Data Fusion - Methods and Applications, 8th Lecture on June 13, 2018
Sensor Data Fusion - Methods and Applications, 8th Lecture on June 13, 2018
Sensor Data Fusion - Methods and Applications, 8th Lecture on June 13, 2018
Sensor Data Fusion - Methods and Applications, 8th Lecture on June 13, 2018
Sensor Data Fusion - Methods and Applications, 8th Lecture on June 13, 2018
Sensor Data Fusion - Methods and Applications, 8th Lecture on June 13, 2018
Sensor Data Fusion - Methods and Applications, 8th Lecture on June 13, 2018
DEMONSTRATION Sensor Data Fusion - Methods and Applications, 8th Lecture on June 13, 2018
Likelihood Functions The likelihood function answers the question: What does the sensor tell about the state x of the object? (input: sensor data, sensor model) • ideal conditions, one object: P D = 1 , ⇢ F = 0 p ( z k | x k ) = N ( z k ; Hx k , R ) at each time one measurement: • real conditions, one object: P D < 1 , ⇢ F > 0 k , . . . , z n k at each time n k measurements Z k = { z 1 k } ! n k X N � z j k ; Hx k , R � p ( Z k , n k | x k ) / (1 � P D ) ⇢ F + P D j =1 21 Introduction to Sensor Daten Fusion: Methods and Applications — 8th Lecture on June 13, 2018
PDAF Filter: formally analog to Kalman Filter p ( x k � 1 |Z k � 1 ) ⇡ = N ( x k � 1 ; x k � 1 | k � 1 , P k � 1 | k � 1 ) ( ! initiation) Filtering (scan k � 1 ): p ( x k |Z k � 1 ) ⇡ N ( x k ; x k | k � 1 , P k | k � 1 ) (like Kalman) prediction (scan k ): m k X p j k N ( x k ; x j k | k , P j p ( x k |Z k ) ⇡ Filtering (scan k ): k | k ) ⇡ N ( x k ; x k | k , P k | k ) j =0 P m k j =0 p j k ν j k , ν j = z j = k � Hx k | k � 1 combined innovation ν k k = HP k | k � 1 H > + R k = P k | k � 1 H > S � 1 W k k , S k Kalman gain matrix ( (1 � P D ) ⇢ F k / P p j j p j ⇤ p j ⇤ = p i ⇤ = k , weighting factors | 2 ⇡ S j | e � 1 j S � 1 P D 2 ν > p k k j ν j x k = x k | k � 1 + W k ν k (Filtering Update: Kalman) P k | k � 1 � (1 � p 0 k ) W k SW > P k = (Kalman part) k n P m k � ν k ν k > o j =0 p j k ν j k ν j > W > + W k (Spread of Innovations) k k 22 Introduction to Sensor Daten Fusion: Methods and Applications — 8th Lecture on June 13, 2018
Refined Sensor Modeling: Resolution Phenomena ↵ r = 200 m, ↵ ' = 2 � , ↵ ˙ • band/beam width, coherence: e.g. for RADAR: r = 2 m/s H g x k = 1 2 H ( x 1 k + x 2 • irresolved measurement: k ) “center of gravity” · depending on target-sensor geometry, rel. orientation · resolution capability in r , ' , ˙ r mutually independent • resolution (qualitatively): · very low resolution for: ∆ r< ↵ r , ∆ ' < ↵ ' , ∆ ˙ r< ↵ ˙ r · no resolution phenomena: ∆ r � ↵ r , ∆ ' � ↵ ' , ∆ ˙ r � ↵ ˙ r · small transient region between these domains Sensor Data Fusion - Methods and Applications, 8th Lecture on June 13, 2018
Refined Sensor Modeling: Resolution Phenomena ↵ r = 200 m, ↵ ' = 2 � , ↵ ˙ • band/beam width, coherence: e.g. for RADAR: r = 2 m/s H g x k = 1 2 H ( x 1 k + x 2 • irresolved measurement: k ) “center of gravity” · depending on target-sensor geometry, rel. orientation · resolution capability in r , ' , ˙ r mutually independent • resolution (qualitatively): · very low resolution for: ∆ r< ↵ r , ∆ ' < ↵ ' , ∆ ˙ r< ↵ ˙ r · no resolution phenomena: ∆ r � ↵ r , ∆ ' � ↵ ' , ∆ ˙ r � ↵ ˙ r · small transient region between these domains • Echelon formation: Sensor Data Fusion - Methods and Applications, 8th Lecture on June 13, 2018
Refined Sensor Modeling: Resolution Phenomena ↵ r = 200 m, ↵ ' = 2 � , ↵ ˙ • band/beam width, coherence: e.g. for RADAR: r = 2 m/s H g x k = 1 2 H ( x 1 k + x 2 • irresolved measurement: k ) “center of gravity” · depending on target-sensor geometry, rel. orientation · resolution capability in r , ' , ˙ r mutually independent • resolution (qualitatively): · very low resolution for: ∆ r< ↵ r , ∆ ' < ↵ ' , ∆ ˙ r< ↵ ˙ r · no resolution phenomena: ∆ r � ↵ r , ∆ ' � ↵ ' , ∆ ˙ r � ↵ ˙ r · small transient region between these domains P r ( ∆ r, ∆ ' , ∆ ˙ r ) = 1 � P u ( ∆ r, ∆ ' , ∆ ˙ r ) ↵' ) 2 e � log 2( ∆ ˙ ↵ r ) 2 e � log 2( ∆ ' r r ) 2 P u = e � log 2( ∆ r ↵ ˙ � � 1 O ; H ( x 1 k � x 2 2 N = | 2 ⇡ R u | k ) , R u • a simple resolution model: Sensor Data Fusion - Methods and Applications, 8th Lecture on June 13, 2018
` ( Z k , n k | x k ) = P Interpretation hypotheses: E k ` ( Z k , n k , E k | x k ) • E ii k : Objects irresolved, detected as a group, z i k 2 Z k being the plot: k ; H g k x k , R g ` ( Z k , n k , E ii k | x k ) = const . ⇥ P u ( x k ) N ( z i k ) ✓✓ ◆ ✓ ◆ ✓ ◆◆ H g R g z i = const . 0 ⇥ N k O ; x k , k k H u O R u o Assuming E ii k , we process a (real) measurement z i k of the center 1 2 H ( x 1 k + x 2 k ) and a (fictitious) measurement “zero” of the distance H ( x 1 k � x 2 k ) between the targets. R u defines the resolution capability. Sensor Data Fusion - Methods and Applications, 8th Lecture on June 13, 2018
` ( Z k , n k | x k ) = P Interpretation hypotheses: E k ` ( Z k , n k , E k | x k ) • E ii k : Objects irresolved, detected as a group; z i k 2 Z k being the plot ⇣⇣ ⌘ ⇣ ⌘ ⇣ ⌘⌘ H g R g z i ` ( Z k , n k , E ii k O k | x k ) = const . ⇥ N ; x k , k k H u O R u o • E 00 k : Objects neither resolved, nor detected; all plots are false D ) p F ( n k ) ` ( Z k , n k , E 00 k | x k ) = P u ( x k ) (1 � P u | FoV | nk ⇣ ⌘ O ; H ( x 1 k � x 2 = const . ⇥ N k ) , R u Assuming E 00 k , a fictitious zero-distance measurement is processed. Sensor Data Fusion - Methods and Applications, 8th Lecture on June 13, 2018
` ( Z k , n k | x k ) = P Interpretation hypotheses: E k ` ( Z k , n k , E k | x k ) • E ii k : Objects irresolved, detected as a group, z i k 2 Z k being the plot ⇣⇣ ⌘ ⇣ ⌘ ⇣ ⌘⌘ H g R g z i ` ( Z k , n k , E ii k O k | x k ) = const . ⇥ N ; x k , k k H u O R u o • E 00 k : Objects neither resolved, nor detected; all plots are false � � ` ( Z k , n k , E 00 O ; H ( x 1 k � x 2 k | x k ) = const . ⇥ N k ) , R u • E ij k , z j k : Objects resolved and individually detected, z i k being the plots ⇣⇣ ⌘ �⌘ � H k � R k O ⇥ ⇤ � z i ` ( Z k , n k | E ij k , x k ) = const . ⇥ 1 � P u ( x k ) N ; x k , k z j H k O R k k Mixtures with negative coefficients occur! Interpretation: Resolved targets keep a minimum distance, otherwise they were irresolvable. Sensor Data Fusion - Methods and Applications, 8th Lecture on June 13, 2018
radar raw data no resolution model with resolution model Sensor Data Fusion - Methods and Applications, 8th Lecture on June 13, 2018
Recommend





More recommend
Explore More Topics
Stay informed with curated content and fresh updates.