Random Graphs (2 nd part) Omid Etesami Phase transitions for - PowerPoint PPT Presentation
Topics in Algorithms and Data Science Random Graphs (2 nd part) Omid Etesami Phase transitions for CNF-SAT Phase transitions for other random structures We already saw phase transitions for random graphs Other random structures, like
Topics in Algorithms and Data Science Random Graphs (2 nd part) Omid Etesami
Phase transitions for CNF-SAT
Phase transitions for other random structures • We already saw phase transitions for random graphs • Other random structures, like Boolean formula in conjunctive normal form (CNF), also have phase transitions
Random k- CNF formula • n variables • m clauses • k literals per clause ( k constant) • literal = variable or negation • each clause independently chosen from possible clauses. • Unsatisfiability is an increasing property, so it has phase transition.
Satisfiability conjecture • Conjecture. There is a constant r k such that m = r k n is a sharp threshold for satisfiability. The conjecture was recently proved for large k by Ding, Sly, Sun!
Upper bound on r k • Let m = cn. • Each truth assignment satisfies the CNF with probability (1 – 2 -k ) cn . • The probability that the CNF is satisfiable is at most 2 n (1 – 2 -k ) cn . • Thus r k ≤ 2 k ln 2. 3-SAT solution space (height represents # of unsatisfied constraints)!
Lower bound on r k • Lower bound more difficult. 2 nd moment method doesn’t work. • We focus on k = 3. • Smallest Clause (SC) heuristic finds a satisfying solution almost surely when m = cn and constant c < 2/3. Thus r 3 ≥ 2/3.
Smallest Clause (SC) heuristic While not all clauses satisfied assign true to a random literal in a random smallest-length clause delete satisfied clauses; delete unsatisfied literals. If a 0-length clause is ever found, we have failed.
Queue of 1-literal and 2-literal clauses • While queue is not empty, a member of the queue is satisfied. • Setting a literal to true, may add other clauses to the queue. • We will show that while the queue is non-empty, the arrival rate is less than the departure rate.
Principle of deferred decisions • We pretend that we do not know the literals appearing in each clause. • During the algorithm, we only know the size of each clause.
Queue arrival rate • When the t’ th literal is assigned value, each 3-literal clause is added to the queue with probability 3/(2(n-t+1)). • (With the same probability, the clause is satisfied.) • Therefore, the average # of clauses added to the queue at each step is at most 3(cn – t + 1)/(2(n-t+1)) = 1 – Ω (1).
The waiting time is O(lg n) Thm. The # steps any clause remains in the queue is Ω (lg n) with probability at most 1/n 3 . The probability that the queue is empty at step t and remains non-empty in steps t, t + 1, …, t + s - 1 is at most exp(- Ω (s)) by multiplicative Chernoff bound: the # arrivals should be at least s while mean # arrivals is s(1 – Ω (1)). (We upper-bound # arrivals with sum of independent Bernoullies.) There are only n choices for t . Therefore for suitable choice of s 0 = Ө (lg n), any non-empty episode is of length at most s 0 with probability 1 – 1/n 3 .
The probability that setting a literal in the i’ th clause makes the j ’th clause false is o(1/n 2 ) If this trouble happens, then • either of i ’th or j’ th clause is added to the queue at some step t, • j ’th clause consists of 1 literal when trouble happens, • by SC rule i ’th clause also consists of 1 literal when its literals is assigned, • with probability 1 – 1/n 3 the waiting time for both clauses is O(lg n). If a 1 , a 2 , … is the sequence of literals that would be set to true (if clauses i and j didn’t exist), then 4 of the literals in these two clauses are the negation of the literals in a t , a t+1 , …, a t’ for t’ = t + O( lg n). This happens with probability O((ln 4 n)/n 4 ) times # choices for t.
Since there are O(n 2 ) pairs of clauses, the algorithm fails with probability o(1) by union bound.
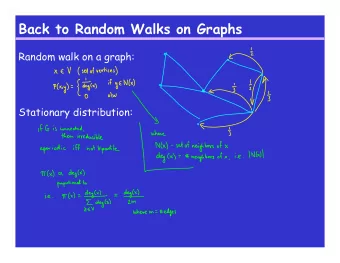
Nonuniform models of random graphs
Nonuniform models • Fix a degree distribution: there is f(d) vertices of degree d • Choose a random graph among all graphs with this degree distribution • Edges are no longer independent
Degree distribution: vertex perspective vs edge perspective • Consider a graph where half of vertices have degree 1, half have degree 2 • A random vertex is equally likely of degree 1 or 2 • A random vertex of a random edge is twice more likely to be of degree 2 • In many algorithms, we traverse a random edge to reach an endpoint: the probability of reaching a vertex of degree i is then proportional to i λ i , where λ i is the fraction of vertices of degree i
Giant component in random graphs with given degree distribution
[Molloy, Reed] There will be a giant component iff • Intuition: Consider BFS (branching process) from a fixed vertex. • After the first level, a vertex of degree i has exactly i – 1 children. • The branching process has probability of extinction < 1 iff the expected # children E[i – 1] ≥ 1 , or in other words E[i – 2] >= 0 . • In calculating the expectation, the probability of degree i is from the edge perspective (and not the vertex perspective). Thus it is proportional to i λ i .
Example: G(n, p=1/n)
Poisson degree distribution If vertices have Poisson degree distribution with mean d , then random endpoint of a random edge has degree distribution 1 + Poisson(d).
Growth model without preferential attachment
Growing graphs • Vertices and edges are added over time. With preferential attachment • Preferential attachment = selecting endpoints for a new edge with probability proportional to degrees • Without preferential attachment = selecting endpoints for a new edge uniformly at random from the set of existing vertices
Basic growth model without preferential attachment • Start with zero vertices and zero edges new edge • At each time t, add a new vertex • With probability δ , join two random vertices by an edge new vertex The resulting graph may become a multigraph. But since there are t 2 pairs of vertices and O(t) existing edges, a multiple edge or self-loop happens at each step with small probability, and we ignore these cases.
# vertices of each degree Let d k (t) be expected # vertices of degree k at time t. new edge new vertex
degree distribution Let d k (t) = p k t in the limit as t tends to infinity. Geometric distribution which like the Poisson Erdos-Renyi distribution falls off exponentially fast, unlike preferential attachment power-law.
# components of each finite size Let n k (t) be expected # components of size k at time t Components of size 4 and 2 • A randomly picked component is of size k with probability proportional to n k (t) • A randomly picked vertex is in a component of size k with probability equal to k n k (t)
j vertices Recurrence relation for n k (t) k – j vertices • We use expectations instead of actual # of components of each size?! • We ignore edges falling inside components since we are interested in small component sizes.
Recurrence relation for a k =n k (t) / t j vertices k – j vertices
Phase transition for non-finite components
Size of non-finite components below critical threshold
Summary of phase transition
Comparison with static random graph having degree distribution • Could you explain why giant components appear for smaller δ in the grown model?
Why is δ = 1/4 the threshold for static model?
Growth model with preferential attachment
Description of the model • Begin with empty graph • At each time, add a new vertex and with probability δ , attach the new vertex to a vertex selected at random with probability proportional to its degree Obviously the graph has no cycles.
Degree of vertex i at time t Let d i (t) be the degree of vertex i at time t Thus d i (t) = a t 1/2 . Since d i (i) = δ , we have d i (t) = δ (t/i) 1/2 .
Power-law degree distribution Vertex number t δ 2 /d 2 has degree d. Therefore, # of vertices of degree d is In other words, probability of degree d is 2 δ 2 /d 3 .
Small world graphs
Milgram’s experiment • Ask one in Nebraska to send a letter to one in Massachusetts with given address and occupation • At each step, send to someone you know on a “first name” basis who is closer • In successful experiments, it took 5 or 6 steps • Called “six degrees of separation”
The Kleinberg model for random graphs • n × n grid with local and global edges • From each vertex u, there is a long-distance edge to a vertex v • Vertex v is chosen with probability proportional to d(u,v) -r where distance is Manhattan distance.
Normalization factor • Let . • # nodes of distance k from u is at most 4k. • # nodes of distance k from u is at least k for k ≤ n/2. • We have • c r (u) = Θ (1) when r > 2. • c r (u) = Θ (lg n) when r = 2. • c r (u) = Ω (n 2-r ) when r < 2.
No short (polylogarithmic) paths exist when r > 2. • Expected # of edges connecting vertices of distance ≥ d * is • Thus, with high probability there is no edge connecting vertices at distance at least d * for some d * = n 1- Ω (1) . • Since many pairs of vertices are at distance Ω (n) from each other, the shortest path between these pairs is at least n Ω (1) . A pair of vertices with distance Ω (n)
Recommend







More recommend
Explore More Topics
Stay informed with curated content and fresh updates.