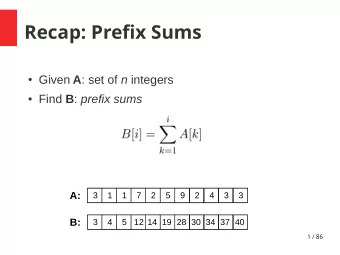
Polynomial optimization and sums of squares Sums-of-squares - PowerPoint PPT Presentation
P OLYNOMIAL O PTIMIZATION WITH S UMS - OF -S QUARES I NTERPOLANTS Sercan Yldz syildiz@samsi.info in collaboration with D avid Papp (NCSU) OPT Transition Workshop May 02, 2017 O UTLINE Polynomial optimization and sums of squares
P OLYNOMIAL O PTIMIZATION WITH S UMS - OF -S QUARES I NTERPOLANTS Sercan Yıldız syildiz@samsi.info in collaboration with D´ avid Papp (NCSU) OPT Transition Workshop May 02, 2017
O UTLINE • Polynomial optimization and sums of squares – Sums-of-squares hierarchy – Semidefinite representation of sums-of-squares constraints • Interior-point methods and conic optimization • Sums-of-squares optimization with interior-point methods – Computational complexity – Preliminary results
P OLYNOMIAL O PTIMIZATION • Polynomial optimization problem: min f ( z ) z ∈ R n s.t. g i ( z ) ≥ 0 for i = 1 , . . . , m where f , g 1 , . . . , g m are n -variate polynomials z 3 1 + 3 z 2 1 z 2 − 6 z 1 z 2 2 + 2 z 3 Example: min 2 z ∈ R 2 z 2 1 + z 2 s.t. 2 ≤ 1 • Some applications: – Shape-constrained estimation – Design of experiments – Control theory Source: http://www.cds.caltech.edu/ ˜murray/amwiki/images/thumb/1/ – Combinatorial optimization 19/Doscpp.png/270px- Doscpp.png – Computational geometry – Optimal power flow Source: https://upload.wikimedia. org/wikipedia/commons/thumb/d/ Source: https://upload.wikimedia. d2/Kissing- 2d.svg/ org/wikipedia/commons/thumb/c/ 190px- Kissing- 2d.svg.png cf/Max- cut.svg/200px- Max- cut. svg.png
S UMS - OF -S QUARES R ELAXATIONS • Let f be an n -variate degree-2 d polynomial. • Unconstrained polynomial optimization: NP-hard already min f ( z ) for d = 2 ! z ∈ R n • Equivalent “dual” formulation: max y y ∈ R s.t. f ( z ) − y ∈ P ∀ z ∈ R n } where P = { f : f ( z ) ≥ 0 • Sums-of-squares cone: SOS = { f : f = � N j = 1 f 2 j for some degree- d polynomials f j } f ∈ SOS ⇒ f ∈ P • SOS relaxation: max y y ∈ R s.t. f ( z ) − y ∈ SOS
S UMS - OF -S QUARES R ELAXATIONS • Let f , g 1 , . . . , g m be n -variate polynomials. • Constrained polynomial optimization: min f ( z ) z ∈ R n s.t. g i ( z ) ≥ 0 for i = 1 , . . . , m • Feasible set: G = { z ∈ R n : g i ( z ) ≥ 0 for i = 1 , . . . , m } . • Dual formulation: max y y ∈ R s.t. f ( z ) − y ∈ P G where P G = { f : f ( z ) ≥ 0 ∀ z ∈ G } • “Weighted” SOS cone of order r : SOS G , r = { f : f = � m i = 0 g i s i , s i ∈ SOS , deg ( g i s i ) ≤ r } where g 0 ≡ 1 f ∈ SOS G , r ⇒ f ∈ P G • SOS relaxation of order r : max y y ∈ R s.t. f ( z ) − y ∈ SOS G , r
W HY D O W E L IKE SOS? • Polynomial optimization is NP-hard. • Increasing r produces a hierarchy of SOS relaxations for polynomial optimization problems. • Under mild assumptions: – The lower bounds from SOS relaxations converge to the true optimal value as r ↑ ∞ (follows from Putinar’s Positivstellensatz). • SOS relaxations can be represented as semidefinite programs of size � n + r / 2 O ( mL 2 ) where L = � (follows from the results of Shor, Nesterov, n Parrilo, Lasserre). • There are efficient and stable numerical methods for solving SDPs.
SOS C ONSTRAINTS A RE S EMIDEFINITE R EPRESENTABLE • Consider the cone of degree-2 d SOS polynomials: SOS 2 d = { f ∈ R [ z ] 2 d : f = � N j = 1 f 2 j for some f j ∈ R [ z ] d } Theorem (Nesterov, 2000) f u z u is SOS iff there exists a The univariate polynomial f ( z ) = � 2 d u = 0 ¯ ( d + 1 ) × ( d + 1 ) PSD matrix S such that ¯ f u = � k + ℓ = u S k ℓ ∀ u = 0 , . . . , 2 d .
SOS C ONSTRAINTS A RE S EMIDEFINITE R EPRESENTABLE • More generally, in the n -variate case: � n + d � n + 2 d – Let L := dim ( R [ z ] d ) = � and U := dim ( R [ z ] 2 d ) = � . n n – Fix bases { p ℓ } L ℓ = 1 and { q u } U u = 1 for the linear spaces R [ z ] d and R [ z ] 2 d . Theorem (Nesterov, 2000) u = 1 ¯ The polynomial f ( z ) = � U f u q u ( z ) is SOS iff there exists a L × L PSD matrix S such that ¯ f = Λ ∗ ( S ) where Λ : R U → S L is the linear map satisfying Λ([ q u ] U ⊤ . u = 1 ) = [ p ℓ ] L ℓ = 1 [ p ℓ ] L ℓ = 1 • If univariate polynomials are represented in the monomial basis : x 0 x 1 x 2 . . . x d x 1 x 2 x 2 � 2 d Λ ∗ ( S ) = �� Λ( x ) = k + ℓ = u S k ℓ u = 0 . . . . x 2 d − 1 x d x 2 d − 1 x 2 d • These results easily extend to the weighted case.
SOS C ONSTRAINTS A RE S EMIDEFINITE R EPRESENTABLE • To keep things simple, we focus on optimization over a single SOS cone. • SOS problem: b ⊤ y max y ∈ R k , S ∈ S L A ⊤ y + Λ ∗ ( S ) = c A ⊤ y + s = c s.t. s ∈ SOS := { s ∈ R U : s = Λ ∗ ( S ) , S � 0 } S � 0 • Moment problem: c ⊤ x min x ∈ R U s.t. Ax = b x ∈ SOS ∗ := { x ∈ R U : Λ( x ) � 0 } Λ( x ) � 0 Disadvantages of existing approaches • Problem: SDP representation roughly squares the number of variables. Solution: We solve the SOS and moment problems in their original space. • Problem: Standard basis choices lead to ill-conditioning . Solution: We use orthogonal polynomials and interpolation bases.
I NTERIOR -P OINT M ETHODS FOR C ONIC P ROGRAMMING • Primal-dual pair of conic programs: b ⊤ y c ⊤ x max min A ⊤ y + s = c s.t. Ax = b s.t. x ∈ K s ∈ K ∗ • K : closed, convex, pointed cone with nonempty interior Examples: K = R n + , S n + , SOS , P • Interior-point methods make use of self-concordant barriers (SCBs) . Examples: – K = R n + : F ( x ) = − log x – K = S n + : F ( X ) = − log det X
I NTERIOR -P OINT M ETHODS FOR C ONIC P ROGRAMMING • Given SCBs F and F ∗ , IPMs converge to the optimal solution by solving a sequence of equality-constrained barrier problems for µ ↓ 0: c ⊤ x + µ F ( x ) b ⊤ y − µ F ∗ ( s ) max min A ⊤ y + s = c s.t. Ax = b s.t. • Primal IPMs: – solve only the primal barrier problem, – are not considered to be practical. • Primal-dual IPMs: – solve both the primal and dual barrier problems simultaneously, – are preferred in practice.
I NTERIOR -P OINT M ETHODS FOR C ONIC P ROGRAMMING • In principle, any closed convex cone admits a SCB (Nesterov and Nemirovski, 1994). • However, the success of the IPM approach depends on the availability of a SCB whose gradient and Hessian can be computed efficiently. – For the cone P , there are complexity-based reasons for suspecting that there are no computationally tractable SCBs. – For the cone SOS , there is evidence suggesting that there may not exist any tractable SCBs. – On the other hand, the cone SOS ∗ inherits a tractable SCB from the PSD cone.
I NTERIOR -P OINT M ETHOD OF S KAJAA AND Y E • Until recently: – The practical success of primal-dual IPMs had been limited to optimization over symmetric cones: LP , SOCP , SDP . – Existing primal-dual IPMs for non-symmetric conic programs required both the primal and dual SCBs (e.g., Nesterov, Todd, and Ye, 1999; Nesterov, 2012). • Skajaa and Ye (2015) proposed a primal-dual IPM for non-symmetric conic programs which – requires a SCB for only the primal cone , – achieves the best-known iteration complexity .
S OLVING SOS P ROGRAMS WITH I NTERIOR -P OINT M ETHODS • Using Skajaa and Ye’s IPM with the SCB for SOS ∗ , the SOS and moment problems can be solved without recourse to SDP . • For any ǫ ∈ ( 0 , 1 ) , the algorithm finds a primal-dual solution that has ǫ √ times the duality gap of an initial solution in O ( L log ( 1 /ǫ )) iterations where L = dim ( R [ x ] d ) . • Each iteration of the IPM requires – the computation of the Hessian of the SCB for SOS ∗ , – the solution of a Newton system. • Solving the Newton system requires O ( U 3 ) operations where U = dim ( R [ z ] 2 d ) .
S OLVING SOS P ROGRAMS WITH I NTERIOR -P OINT M ETHODS • The choice of bases { p ℓ } L ℓ = 1 and { q u } U u = 1 for R [ z ] d and R [ z ] 2 d has a significant effect on how efficiently the Newton system can be compiled. – In general, computing the Hessian requires O ( L 2 U 2 ) operations. – If both bases are chosen to be monomial bases , the Hessian can be computed faster but requires specialized methods such as FFT and the “inversion” of Hankel-like matrices . – Following L¨ ofberg and Parrilo (2004), we choose • { q u } U u = 1 : Lagrange interpolating polynomials, • { p ℓ } L ℓ = 1 : orthogonal polynomials. – With this choice, the Hessian can be computed in O ( LU 2 ) operations .
S OLVING SOS P ROGRAMS WITH I NTERIOR -P OINT M ETHODS • Putting everything together: √ – The algorithm runs in O ( L log ( 1 /ǫ )) iterations. – At each iteration: • Computing the Hessian requires O ( LU 2 ) operations, • Solving the Newton system requires O ( U 3 ) operations. • Overall complexity: O ( U 3 √ L log ( 1 /ǫ )) operations. • This matches the best-known complexity bounds for LP! • In contrast: – Solving the SDP formulation with a primal-dual IPM requires O ( L 6 . 5 log ( 1 /ǫ )) operations. – For fixed n : L 2 U = Θ( d n ) .
S OLVING SOS P ROGRAMS WITH I NTERIOR -P OINT M ETHODS • The conditioning of the moment problem is directly related to the conditioning of the interpolation problem with { p k p ℓ } L k ,ℓ = 1 . • Good interpolation nodes are understood well only in few low-dimensional domains: – Chebyshev points in [ − 1 , 1 ] , – Padua points in [ − 1 , 1 ] 2 (Caliari et al., 2005). • For problems in higher dimensions, we follow a heuristic approach to choose interpolation nodes.
Recommend













More recommend
Explore More Topics
Stay informed with curated content and fresh updates.