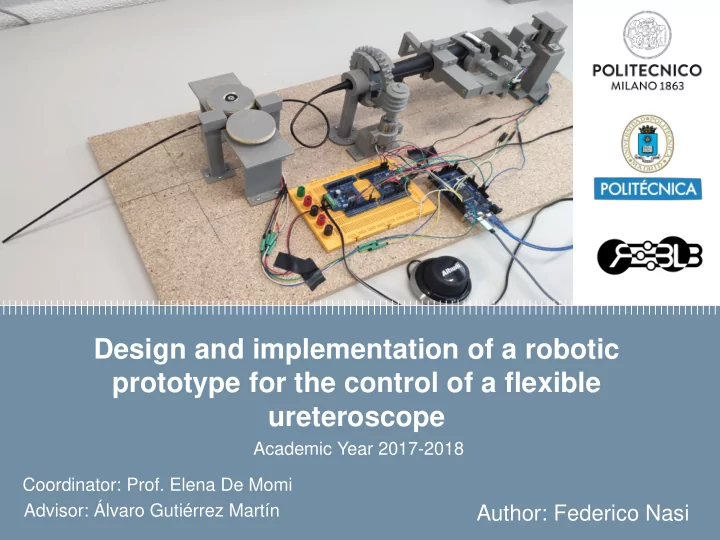
Firma convenzione Design and implementation of a robotic Politecnico di Milano e Veneranda Fabbrica prototype for the control of a flexible del Duomo di Milano ureteroscope Academic Year 2017-2018 Aula Magna – Rettorato Coordinator: Prof. Elena De Momi Mercoledì 27 maggio 2015 Advisor: Álvaro Gutiérrez Martín Author: Federico Nasi
Clinical Problem Urinary Lithiasis Kidney Stones formation in the urinary tract Current Clinical Solution fURS: Flexible ureteroscopy ✓ Less invasive ✓ Higher efficiency 4.53% of the male population In Italy 3.78% of the female population Federico Nasi 878729
Flexible Ureteroscopy Urinary Lithiasis Kidney Stones formation in the urinary tract Current Clinical Solution fURS: Flexible ureteroscopy fURS Flexible cable Handle • Laser fibre • Light • Stone Basket • Control Lever Imaging Sensor Federico Nasi 878729
Flexible Ureteroscopy Urinary Lithiasis Kidney Stones formation in the urinary tract Current Clinical Solution fURS: Flexible ureteroscopy fURS Federico Nasi 878729
Flexible Ureteroscopy Urinary Lithiasis Kidney Stones formation in the urinary tract Current Clinical Solution fURS: Flexible ureteroscopy fURS Radiation-exposed Ergonomic problems for surgeons surgeons Drawbacks Federico Nasi 878729
Robotized Flexible Ureteroscopy Urinary Lithiasis Kidney Stones formation in the urinary tract Current Clinical Solution fURS: Flexible ureteroscopy Avicenna Roboflex Robotized fURS fURS (ELMED, Ankara, Turkey) (Saglam, et al., 2014) • Ureteroscope controlled from an ergonomically advantageous and safe position • Visualization of endoscopic and X-ray images directly on the console Federico Nasi 878729
Robotized Flexible Ureteroscopy Urinary Lithiasis Kidney Stones formation in the urinary tract Current Clinical Solution fURS: Flexible ureteroscopy Avicenna Roboflex Robotized fURS fURS (ELMED, Ankara, Turkey) (Saglam, et al., 2014) LIMITS • Number of DOF • Ad-hoc system High cost Federico Nasi 878729
LITHOS project Elements Multifunctional Robotic arm Specific Actuator Control Console X-ray Machine Integration Federico Nasi 878729
LITHOS project Elements Objectives Multifunctional Improved Robotic arm Control, more DOF Specific Versatility Actuator Control Console Nowadays interrupted X-ray Machine Integration Federico Nasi 878729
LITHOS project Elements Advantages Multifunctional Improved Robotic arm Control Specific Versatility Actuator Control Console X-ray Machine Integration Federico Nasi 878729
Aim of the work Study and creation of a robotic support and movement control system for a commercial ureteroscope, within the LITHOS project. • Design of mechanical parts • Design of mechanical parts for the realization of 3 for the realization of 3 basic instrument basic instrument movements movements Cobra Vision, Flexible Dual Channel Sensor Ureterorenoscope, Richard Wolf • Hardware and Firmware, design and development for the control of the robot and the realization of a graphic interface. Federico Nasi 878729
Aim of the work Study and creation of a robotic support and movement control system for a commercial ureteroscope, within the LITHOS project. • Design of mechanical parts • Movement Range for the realization of 3 basic instrument • Movement Resolution movements • Hardware and Firmware, design and development for the control of the robot and the realization of a graphic interface. Federico Nasi 878729
Aim of the work Study and creation of a robotic support and movement control system for a commercial ureteroscope, within the LITHOS project. Which • Insertion/Retraction of movement? endoscopic cable • Insertion in the urinary system and its exploration looking for Why? stones • Extraction of stone once taken • Range 55 cm Specifications • Resolution 0.5 cm Federico Nasi 878729
Aim of the work Study and creation of a robotic support and movement control system for a commercial ureteroscope, within the LITHOS project. Which • Rotation around its movement? longitudinal axis • Improve the manoeuvrability of the instrument Why? • Alignment the different terminals of the tip with the target 360° • Range ±360° Specifications • Resolution 0.5° Federico Nasi 878729
Aim of the work Study and creation of a robotic support and movement control system for a commercial ureteroscope, within the LITHOS project. Which • Tip Deflection Movement movement? • Improve the manoeuvrability of the instrument Why? • Alignment the different terminals of the tip with the target • Range 90° Specifications • Resolution 5° 90° Federico Nasi 878729
Aim of the work Study and creation of a robotic support and movement control system for a commercial ureteroscope, within the LITHOS project. Design and implementation of 1 Mechanical mechanical technological solution for the realization of three basic movements Control & 2 Electronic 3 Experimental Federico Nasi 878729
Aim of the work Study and creation of a robotic support and movement control system for a commercial ureteroscope, within the LITHOS project. 1 Mechanical • Hardware Control & 2 • Firmware Electronic 3 Experimental Federico Nasi 878729
Aim of the work Study and creation of a robotic support and movement control system for a commercial ureteroscope, within the LITHOS project. 1 Mechanical Control & 2 Electronic • Movement Range 3 Experimental • Movement Resolution Federico Nasi 878729
Aim of the work Study and creation of a robotic support and movement control system for a commercial ureteroscope, within the LITHOS project. 1 Mechanical Control & 2 Electronic 3 Experimental Federico Nasi 878729
Mechanical phase Design and implementation of mechanical technological solution for the realization of three basic movements Allow the requested Hold the Hold the motors movements instrument Mechanical parts Metal Gearmotor by Pololu • Power: HP 12 V • Gearbox: 99:1 • Encoder: 48 CPR Federico Nasi 878729
Mechanical phase, Insertion/retraction movement Drag system 68 cm 13,3 cm 6 cm 19 cm 5,4 cm 11,2 cm Federico Nasi 878729
Mechanical phase, Rotation movement Worm Gear 13 cm 68 cm 13 cm 9 cm 5,4 cm 7 cm Federico Nasi 878729
Mechanical phase, Tip Deflection movement Hooking 68 cm system 4,2 cm 8 cm 5,4 cm Federico Nasi 878729
Aim of the work Study and creation of a robotic support and movement control system for a commercial ureteroscope, within the LITHOS project. 1 Mechanical Control & 2 Electronic 3 Experimental Federico Nasi 878729
Control & Electronic Phase • Activation of the motors with a controller device from a Hardware Firmware comfortable and safe position • Collection of encoder data and Creation of a Graphic User Interface to plot them Movable • Allowing the user to manage the controller cap Robot Mouse different movements movement movement Fixed base Right and left rotation 3D mouse (SpaceMouse Rotation of the instrument of the controller cap Compact, 3D connexion, Boston, USA) Insertion/Retraction of Back and forth inclination the cable of the controller cap Right and left inclination Tip Deflection of the controller cap Acceleration/Deceleration Lateral buttons rotation movement Federico Nasi 878729
Control & Electronic Phase • Activation of the motors with a controller device from a Hardware Firmware comfortable and safe position • Collection of encoder data and Creation of a Graphic User Interface to plot them Mouse motion data • Activating and deactivating the 3 motors according to the received data from the PC Motor activation data PWM Motion data transmission Federico Nasi 878729
Control & Electronic Phase • Activation of the motors with a controller device from a Hardware Firmware comfortable and safe position • Collection of encoder data and Creation of a Graphic User Interface to plot them • Receiving data produced by the encoders • Processing to obtain information Motor position about position and speed . and velocity Encoder data (counts per revolution) Federico Nasi 878729
Control & Electronic Phase • Activation of the motors with a controller device from a Hardware Firmware comfortable and safe position • Collection of encoder data and Creation of a Graphic User Interface to plot them Motor position and velocity Motor position and velocity • Creating a graphical Encoder data interface to plot the (counts per received data of revolution) velocity and position Federico Nasi 878729
Final system, Insertion/Retraction movement Velocity Position Federico Nasi 878729
Final system, Rotation movement Position Velocity Federico Nasi 878729
Final system, Tip deflection movement Velocity Position Federico Nasi 878729
Aim of the work Study and creation of a robotic support and movement control system for a commercial ureteroscope, within the LITHOS project. 1 Mechanical Control & 2 Electronic 3 Experimental Federico Nasi 878729
Recommend
More recommend
Unleash a World of Digital Possibilities—Browse, Share, and Explore Content Without Boundaries