
SLIDE 1
Parking Maid Overview and Objectives To design a smart parking - - PowerPoint PPT Presentation
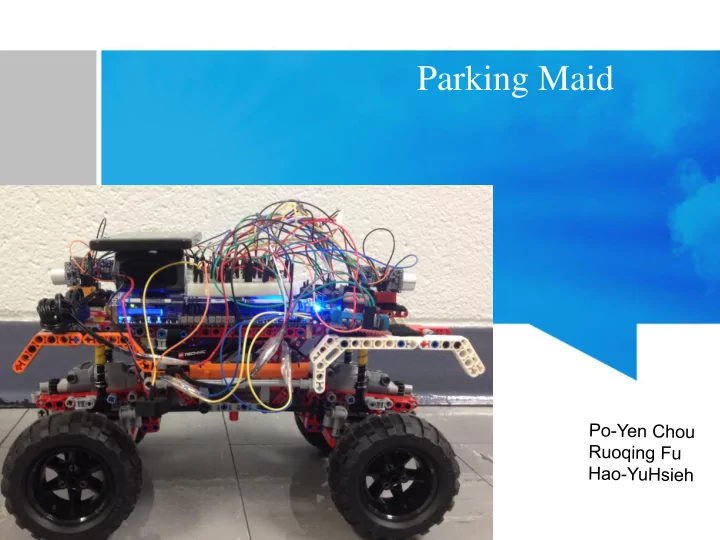
Parking Maid Overview and Objectives To design a smart parking robot that can detect empty parking space and park into the area automatically with FPGA control Functions that Robot can perform Move forward and backward Make
Servo Motor
PD PD PD PD Motor Motor Ultrasonic PD PD PD PD
12V GND 5V EN IN1 IN2 C1(in) C2(in) C1(in) C2(in) GND 12V(in) 5V(out) GND(in) (in) (in) (in)
J2 J3
PD
3.3V GND
47 Ohm resistor HSMC-RX-n16 HSMC-RX-p16 HSMC-RX-n15 HSMC-TX-n9 HSMC-TX-p9 HSMC-RX-n0 HSMC-RX-p0 HSMC-TX-n0 HSMC-TX-p0
L298N - Convert IN1, IN2 from 3.3V to 12V and send to C1, C2 of Motors. In addition, it can provide 5 V output.
12V (in) GND (in) C1 (in) C2 (in)
Ultrasonic
GND(in) 5V(in) GND(in) 5V(in) echo(out) trigger(in) echo(out) trigger(in) Schottky diode - 1N5818 12V - battery box 5V - L298N 3.3V - HSMC pin Voltage sources: RXI(in) RXI(in) HV(in) 5V GND LV(in) 3.3V GND RXO(out) RXO(out) HSMC-TX-n2 HSMC-TX-p2 HSMC-TX-n1 HSMC-TX-p1
Level shifter
PD
3.3V (out)
Ultrasonic PD PD PD PD Ultrasonic
GND(in) 5V(in) GND(in) 5V(in) echo(out) trigger(in) echo(out) trigger(in) RXI(in) RXI(in) HV(in) 5V GND LV(in) 3.3V GND RXO(out) RXO(out)
Level shifter