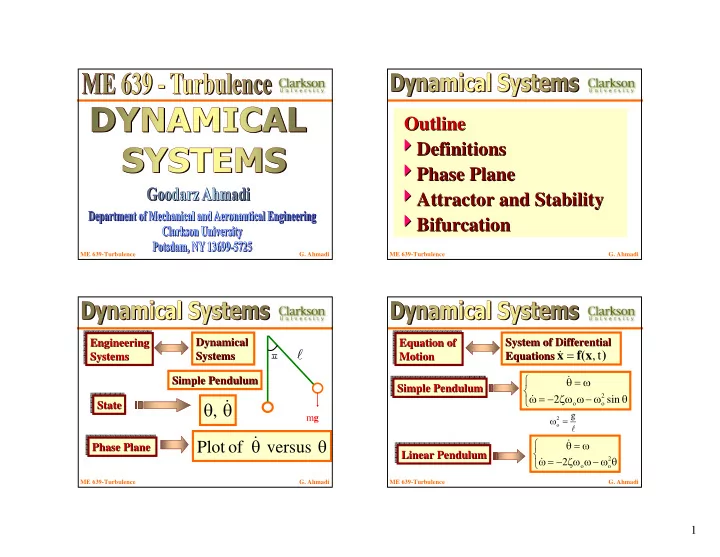
Outline Outline 4 Definitions 4 Definitions 4 Phase Plane 4 - PowerPoint PPT Presentation
Outline Outline 4 Definitions 4 Definitions 4 Phase Plane 4 Phase Plane 4 Attractor and Stability 4 Attractor and Stability 4 Bifurcation 4 Bifurcation ME 639-Turbulence G. Ahmadi ME 639-Turbulence G. Ahmadi Engineering Equation of
Outline Outline 4 Definitions 4 Definitions 4 Phase Plane 4 Phase Plane 4 Attractor and Stability 4 Attractor and Stability 4 Bifurcation 4 Bifurcation ME 639-Turbulence G. Ahmadi ME 639-Turbulence G. Ahmadi Engineering Equation of Dynamical System of Differential Engineering Engineering Dynamical Equation of Equation of System of Differential = l & Systems 2 Motion x f(x , t ) Systems Equations Systems Systems Systems Motion Motion Equations ⎧ & θ = ω Simple Pendulum Simple Pendulum Simple Pendulum Simple Pendulum Simple Pendulum ⎨ ω = − ζω ω − ω θ & 2 ⎩ 2 sin θ & θ State State State o o , g m g ω o = 2 l & θ versus θ ⎧ & θ = ω Plot of Phase Plane Phase Plane Phase Plane ⎨ Linear Pendulum Linear Pendulum Linear Pendulum ω = − ζω ω − ω θ & 2 ⎩ 2 o o ME 639-Turbulence G. Ahmadi ME 639-Turbulence G. Ahmadi 1
Autonomous Autonomous Autonomous Time Does Not Time Does Not Vectors Tangent Vectors Tangent Flow Flow Flow Systems Systems Systems Appear Explicitly Appear Explicitly to Trajectories in to Trajectories in Phase Space Phase Space Nonautonomous Nonautonomous Time Appears Time Appears Nonautonomous Systems Null Cline Lines in Phase Space Lines in Phase Space Systems Explicitly Explicitly Systems Null Cline Null Cline x i = & 0 for for Curves in Phase Space Curves in Phase Space Pendulum Pendulum Orbit/ Orbit/ Orbit/ Solutions of Equation Solutions of Equation ⎧ & θ = ω = Trajectory Trajectory Trajectory 0 ⎨ of Motion of Motion ω = − ω θ ζ & ⎩ sin / 2 o ME 639-Turbulence G. Ahmadi ME 639-Turbulence G. Ahmadi Non-Wandering Set Intersection Non- -Wandering Set Wandering Set Non Intersection Intersection Equilibrium Points Equilibrium Points A set of points that orbits starting form A set of points that orbits starting form of Clines A set of points that orbits starting form of Clines of Clines this set come arbitrary close and this set come arbitrary close and this set come arbitrary close and arbitrary often to any point in the set arbitrary often to any point in the set arbitrary often to any point in the set Poincare Section Poincare Section Poincare Section • Fixed (stationary) points • Fixed (stationary) points • Fixed (stationary) points Poincare Map Poincare Map Poincare Map • Limit cycle (periodic) • Limit cycle (periodic) • Limit cycle (periodic) • Quasi periodic • Quasi periodic • Quasi periodic • Chaotic (bounded, non-periodic) • Chaotic (bounded, non Chaotic (bounded, non- -periodic) periodic) • ME 639-Turbulence G. Ahmadi ME 639-Turbulence G. Ahmadi 2
Nonlinear Dynamical Systems Lyapunov (Marginal) Stability Lyapunov (Marginal) Stability (Marginal) Stability Nonlinear Dynamical Systems Nonlinear Dynamical Systems Lyapunov • Qualitative Behavior A non-wandering set (NWS) is • Qualitative Behavior Qualitative Behavior A non- A non -wandering set (NWS) is wandering set (NWS) is • • Non-wandering sets Lyapunov stable if every orbit starting in its • Non Non- -wandering sets wandering sets Lyapunov stable if every orbit starting in its Lyapunov stable if every orbit starting in its • • Stability of non-wandering sets neighborhood stays in its neighborhood. • Stability of non Stability of non- -wandering sets wandering sets neighborhood stays in its neighborhood. neighborhood stays in its neighborhood. • • Changes in the number of non-wandering sets • Changes in the number of non Changes in the number of non- -wandering sets wandering sets • Asymptotic Stability Asymptotic Stability Asymptotic Stability Bifurcation Bifurcation Bifurcation A NWS is asymptotically stable if in A NWS is asymptotically stable if in A NWS is asymptotically stable if in Appearance and Disappearance of Appearance and Disappearance of Appearance and Disappearance of addition to Lyapunov stability every orbit in addition to Lyapunov addition to Lyapunov stability every orbit in stability every orbit in Non-wandering sets Non- Non -wandering sets wandering sets its neighborhood approaches the NWS. its neighborhood approaches the NWS. its neighborhood approaches the NWS. ME 639-Turbulence G. Ahmadi ME 639-Turbulence G. Ahmadi o = & x f(x ) Attractors Given an Orbit x ( t ) , t Attractors Given an Orbit Attractors Given an Orbit o o Asymptotically stable non-wandering Asymptotically stable non- -wandering wandering Asymptotically stable non ∆ x o (t) is asymptotically d ( x ) d f ( x ) x o x o (t (t) is asymptotically ) is asymptotically sets are called attractors. sets are called attractors. = ⋅ ∆ sets are called attractors. o x stable if ∆ x(t) decays stable if ∆ ∆ x(t) decays stable if x(t) decays dt d x d f − λ λ Basin of Attraction del I Basin of Attraction Basin of Attraction s d x The set of all initial states that The set of all initial states that The set of all initial states that λ approach the attractor. ∆ = ∆ approach the attractor. approach the attractor. t x e x s Solution Solution s ME 639-Turbulence G. Ahmadi ME 639-Turbulence G. Ahmadi 3
λ Stable Orbit if all are negative Two real eigenvalues Stable Orbit if all are negative Stable Orbit if all are negative Two real Two real eigenvalues eigenvalues Nodes Nodes s of the same sign of the same sign of the same sign Routh-Hurwitz Theorem Routh- -Hurwitz Theorem Hurwitz Theorem Routh For two-D all the roots For two- -D all the roots D all the roots For two Pair of complex Pair of complex d f Pair of complex > are negative if Spirals Spirals are negative if are negative if del 0 conjugate eigenvalues conjugate eigenvalues eigenvalues conjugate x d d f < Two real eigenvalues tr 0 Two real eigenvalues Two real eigenvalues Saddle Saddle d x with opposite sign with opposite sign with opposite sign ME 639-Turbulence G. Ahmadi ME 639-Turbulence G. Ahmadi A change in the number of attractors of a A change in the number of attractors of a In a stationary bifurcation, a single In a stationary bifurcation, a single nonlinear dynamical systems with the change nonlinear dynamical systems with the change real eigenvalue real eigenvalue crosses the boundary crosses the boundary of a system parameter is called bifurcation bifurcation. . of a system parameter is called of stability. of stability. Bifurcation is associated with the Bifurcation is associated with the change of stability of an attractor change of stability of an attractor. . In a bifurcation point, at least one In a bifurcation point, at least one eigenvalue eigenvalue of the of the Jacobian Jacobian will attain a will attain a zero real part. zero real part. ME 639-Turbulence G. Ahmadi ME 639-Turbulence G. Ahmadi 4
Hopf bifurcation occurs when a Consider a = µ − Hopf bifurcation occurs when a Consider a Consider a & 2 u ( u ) u dynamical system conjugated complex pair crosses the dynamical system dynamical system conjugated complex pair crosses the boundary of stability. boundary of stability. µ <0, u=0 is a stable equilibrium solution. For µ <0, u=0 is a stable equilibrium solution. For µ >0, u=0 is an unstable equilibrium For µ For >0, u=0 is an unstable equilibrium ±µ 1/2 solution, and u= ±µ 1/2 are stable solutions. are stable solutions. solution, and u= At µ µ =0, a =0, a suppercritical suppercritical Pitchfork Pitchfork At bifurcation occurs. bifurcation occurs. ME 639-Turbulence G. Ahmadi ME 639-Turbulence G. Ahmadi = µ − = µ + Consider a Consider a & Consider a Consider a & 2 Consider a Consider a u ( u ) u u ( u ) u dynamical system dynamical system dynamical system dynamical system dynamical system dynamical system For µ µ <0, u=0 is a stable equilibrium solution, µ <0, u=0 is a stable equilibrium solution, For µ For <0, u=0 is a stable equilibrium solution, <0, u=0 is a stable equilibrium solution, For and u= µ µ is an unstable solution. and u= ± ± ( - µ µ ) 1/2 are unstable solutions. and u= is an unstable solution. ) 1/2 (- are unstable solutions. and u= µ >0, u=0 is an unstable solution, and u= µ is For µ >0, u=0 is an unstable solution, and u= µ µ >0, u=0 is an unstable equilibrium solution. is For µ For >0, u=0 is an unstable equilibrium solution. For a stable equilibrium a stable equilibrium solution. solution. At µ µ =0, a =0, a subcritical subcritical Pitchfork Pitchfork At µ =0, the two solution exchange stability At µ =0, the two solution exchange stability At bifurcation occurs. bifurcation occurs. and a transcritical transcritical bifurcation occurs. bifurcation occurs. and a ME 639-Turbulence G. Ahmadi ME 639-Turbulence G. Ahmadi 5
Recommend
![[9] Orthogonalization Finding the closest point in a plane Goal: Given a point b and a plane, find](https://c.sambuz.com/1004577/9-orthogonalization-finding-the-closest-point-in-a-plane-s.webp)












More recommend
Explore More Topics
Stay informed with curated content and fresh updates.