Numerical modeling of slender structures with contact and friction - PowerPoint PPT Presentation
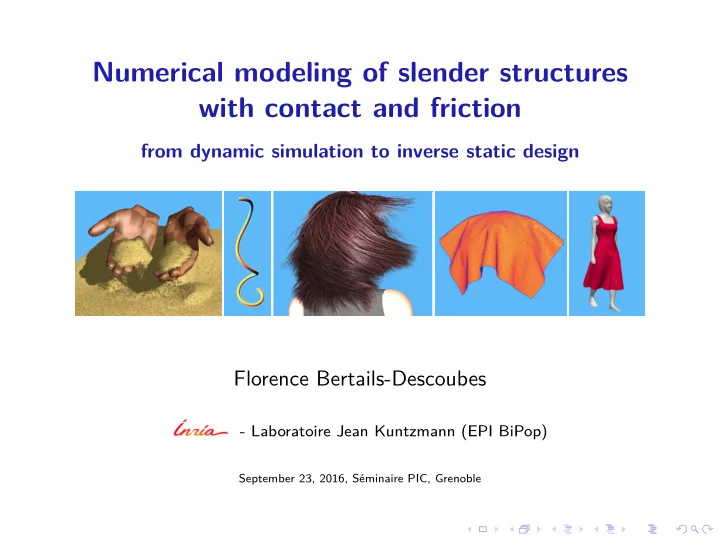
Numerical modeling of slender structures with contact and friction from dynamic simulation to inverse static design Florence Bertails-Descoubes - Laboratoire Jean Kuntzmann (EPI BiPop) September 23, 2016, Sminaire PIC, Grenoble Research Area
Two Families of Choice of Coordinates θ Reduced model m ℓ ¨ coordinate θ θ = − mg sin θ Inextensibility is intrinsically preserved
Two Families of Choice of Coordinates θ Reduced model m ℓ ¨ coordinate θ θ = − mg sin θ Inextensibility is intrinsically preserved Inversion gets easier
More Generally : Spatial Discretization Choice of coordinates q ∈ R m : generalized coordinates, finite number K ( q , q 0 ) · ¨ + + = M ( q ) q A ( q , ˙ q ) F ( q , ˙ q , t ) s.t. C ( q ) = 0
More Generally : Spatial Discretization Choice of coordinates q ∈ R m : generalized coordinates, finite number • Inertia matrix K ( q , q 0 ) · ¨ + + = M ( q ) q A ( q , ˙ q ) F ( q , ˙ q , t ) s.t. C ( q ) = 0
More Generally : Spatial Discretization Choice of coordinates q ∈ R m : generalized coordinates, finite number • Inertia matrix • Internal elastic forces K ( q , q 0 ) · ¨ + + = M ( q ) q A ( q , ˙ q ) F ( q , ˙ q , t ) s.t. C ( q ) = 0
More Generally : Spatial Discretization Choice of coordinates q ∈ R m : generalized coordinates, finite number • Inertia matrix • Internal elastic forces • Nonlinear inertial terms K ( q , q 0 ) · ¨ + + = M ( q ) q A ( q , ˙ q ) F ( q , ˙ q , t ) s.t. C ( q ) = 0
More Generally : Spatial Discretization Choice of coordinates q ∈ R m : generalized coordinates, finite number • Inertia matrix • Internal elastic forces • Nonlinear inertial terms • External forces K ( q , q 0 ) · ¨ + + = M ( q ) q A ( q , ˙ q ) F ( q , ˙ q , t ) s.t. C ( q ) = 0
More Generally : Spatial Discretization Choice of coordinates q ∈ R m : generalized coordinates, finite number • Inertia matrix • Internal elastic forces • Nonlinear inertial terms • External forces K ( q , q 0 ) · ¨ + + = M ( q ) q A ( q , ˙ q ) F ( q , ˙ q , t ) s.t. C ( q ) = 0 • Constraints
More Generally : Spatial Discretization Choice of coordinates q ∈ R m : generalized coordinates, finite number • Inertia matrix • Internal elastic forces • Nonlinear inertial terms • External forces K ( q , q 0 ) · ¨ + + = M ( q ) q A ( q , ˙ q ) F ( q , ˙ q , t ) s.t. C ( q ) = 0 • Constraints
More Generally : Spatial Discretization Choice of coordinates q ∈ R m : generalized coordinates, finite number • Inertia matrix • Internal elastic forces Nodal model • Nonlinear inertial terms • External forces K ( q , q 0 ) · ¨ + = q F ( q , ˙ q , t ) M s.t. C ( q ) = 0 • Constraints Nodal model : M is sparse , constraints , K is nonlinear
More Generally : Spatial Discretization Choice of coordinates q ∈ R m : generalized coordinates, finite number • Inertia matrix • Internal elastic forces Reduced model • Nonlinear inertial terms • External forces K · ( q − q 0 ) · ¨ + + = M ( q ) q A ( q , ˙ q ) F ( q , ˙ q , t ) Reduced model : M is dense , no constraint , K is linear
More Generally : Spatial Discretization Choice of coordinates q ∈ R m : generalized coordinates, finite number • Inertia matrix • Internal elastic forces • Nonlinear inertial terms • External forces K · ( q − q 0 ) · ¨ + + = M ( q ) q A ( q , ˙ q ) F ( q , ˙ q , t ) → We choose reduced and high-order coordinates : curvatures
More Generally : Spatial Discretization Choice of coordinates q ∈ R m : generalized coordinates, finite number • Inertia matrix • Internal elastic forces • Nonlinear inertial terms • External forces K · ( q − q 0 ) · ¨ + + = M ( q ) q A ( q , ˙ q ) F ( q , ˙ q , t ) → We choose reduced and high-order coordinates : curvatures N.B. : The centerline will not be explicit
Geometry of a Kirchhoff Rod • Centerline C ( s ) • Material frame R ( s ) R ( s ) = { n 0 ( s ) , n 1 ( s ) , n 2 ( s ) } with n 0 ( s ) = C ′ ( s ) • Degrees of freedom : • twist κ 0 ( s ) • curvatures κ 1 ( s ), κ 2 ( s ) • Darboux vector : Ω Ω Ω( s ) = κ 0 ( s ) n 0 ( s )+ κ 1 ( s ) n 1 ( s )+ κ 2 ( s ) n 2 ( s ) • Rotation of the material frame d n i ∀ i = 0 , 1 , 2 ds ( s ) = Ω Ω Ω( s ) ∧ n i ( s )
Geometry : Darboux Problem κ 2 κ 1 κ 0 d n i ∀ i ds ( s ) = Ω Ω Ω( s ) ∧ n i ( s ) R (0) = R 0
Geometry : Darboux Problem κ 2 κ 1 κ 0 d n i ∀ i ds ( s ) = Ω Ω Ω( s ) ∧ n i ( s ) R (0) = R 0 Exact solution • Existence of a unique solution • However, no explicit formula in the general case → Numerical integration may be computationally expensive
Discrete Geometry : Super-Helix κ 2 κ 1 κ 0 d n i Ω ∀ i ds ( s ) = Ω Ω( s ) ∧ n i ( s ) R (0) = R 0
Discrete Geometry : Super-Helix κ 2 κ 1 κ 0 d n i Ω ∀ i ds ( s ) = Ω Ω( s ) ∧ n i ( s ) R (0) = R 0 If κ 0 ( s ), κ 1 ( s ), κ 2 ( s ) are piecewise constant [Bertails et al. 2006]
Discrete Geometry : Super-Helix κ 2 κ 1 κ 0 d n i Ω ∀ i ds ( s ) = Ω Ω( s ) ∧ n i ( s ) R (0) = R 0 If κ 0 ( s ), κ 1 ( s ), κ 2 ( s ) are piecewise constant [Bertails et al. 2006]
Discrete Geometry : Super-Helix κ 2 κ 1 κ 0 d n i Ω ∀ i ds ( s ) = Ω Ω( s ) ∧ n i ( s ) R (0) = R 0 If κ 0 ( s ), κ 1 ( s ), κ 2 ( s ) are piecewise constant [Bertails et al. 2006] • On each element, closed-form solution for R ( s ) and C ( s )
Discrete Geometry : Super-Helix κ 2 κ 1 κ 0 d n i Ω ∀ i ds ( s ) = Ω Ω( s ) ∧ n i ( s ) R (0) = R 0 If κ 0 ( s ), κ 1 ( s ), κ 2 ( s ) are piecewise constant [Bertails et al. 2006] • On each element, closed-form solution for R ( s ) and C ( s ) → Equations for a circular helix
Discrete Geometry : Super-Helix κ 2 κ 1 κ 0 d n i Ω ∀ i ds ( s ) = Ω Ω( s ) ∧ n i ( s ) R (0) = R 0 If κ 0 ( s ), κ 1 ( s ), κ 2 ( s ) are piecewise constant [Bertails et al. 2006] • On each element, closed-form solution for R ( s ) and C ( s ) → Equations for a circular helix • Continuous connection of R ( s ) between elements
Discrete Geometry : Super-Helix κ 2 κ 1 κ 0 d n i Ω ∀ i ds ( s ) = Ω Ω( s ) ∧ n i ( s ) R (0) = R 0 If κ 0 ( s ), κ 1 ( s ), κ 2 ( s ) are piecewise constant [Bertails et al. 2006] • On each element, closed-form solution for R ( s ) and C ( s ) → Equations for a circular helix • Continuous connection of R ( s ) between elements → All the kinematics is of closed-form → The centerline C ( s ) is C 1 -smooth
Discrete Dynamics : Super-Helix 2 ] T ∈ R 3 N q = [ κ 1 0 , κ 1 1 , κ 2 2 , . . . , κ N 0 , κ N 1 , κ N
Discrete Dynamics : Super-Helix 2 ] T ∈ R 3 N q = [ κ 1 0 , κ 1 1 , κ 2 2 , . . . , κ N 0 , κ N 1 , κ N Computing the terms of the ODE K · ( q − q 0 ) = M ( q ) · ¨ q + + A ( q , ˙ q ) F ( q , ˙ q , t )
Discrete Dynamics : Super-Helix 2 ] T ∈ R 3 N q = [ κ 1 0 , κ 1 1 , κ 2 2 , . . . , κ N 0 , κ N 1 , κ N Computing the terms of the ODE K · ( q − q 0 ) = M ( q ) · ¨ q + + A ( q , ˙ q ) F ( q , ˙ q , t ) • Closed-form expression in q , ˙ q for each term
Discrete Dynamics : Super-Helix 2 ] T ∈ R 3 N q = [ κ 1 0 , κ 1 1 , κ 2 2 , . . . , κ N 0 , κ N 1 , κ N Computing the terms of the ODE K · ( q − q 0 ) = M ( q ) · ¨ q + + A ( q , ˙ q ) F ( q , ˙ q , t ) • Closed-form expression in q , ˙ q for each term � ∂ C � L � T · ∂ C • Example : M i , j = ρ S ( s ) ( s ) d s ∂ q i ∂ q j 0
Discrete Dynamics : Super-Helix 2 ] T ∈ R 3 N q = [ κ 1 0 , κ 1 1 , κ 2 2 , . . . , κ N 0 , κ N 1 , κ N Computing the terms of the ODE K · ( q − q 0 ) = M ( q ) · ¨ q + + A ( q , ˙ q ) F ( q , ˙ q , t ) • Closed-form expression in q , ˙ q for each term � ∂ C � L � T · ∂ C • Example : M i , j = ρ S ( s ) ( s ) d s ∂ q i ∂ q j 0 Time-solving • Mixed implicit/explicit Euler scheme M v + f = 0 avec v = ˙ q t +1
Discrete Dynamics : Super-Helix 2 ] T ∈ R 3 N q = [ κ 1 0 , κ 1 1 , κ 2 2 , . . . , κ N 0 , κ N 1 , κ N Computing the terms of the ODE K · ( q − q 0 ) = M ( q ) · ¨ q + + A ( q , ˙ q ) F ( q , ˙ q , t ) • Closed-form expression in q , ˙ q for each term � ∂ C � L � T · ∂ C • Example : M i , j = ρ S ( s ) ( s ) d s ∂ q i ∂ q j 0 Time-solving • Mixed implicit/explicit Euler scheme M v + f = 0 avec v = ˙ q t +1 • Implicit elastic forces
Discrete Dynamics : Super-Helix 2 ] T ∈ R 3 N q = [ κ 1 0 , κ 1 1 , κ 2 2 , . . . , κ N 0 , κ N 1 , κ N Computing the terms of the ODE K · ( q − q 0 ) = M ( q ) · ¨ q + + A ( q , ˙ q ) F ( q , ˙ q , t ) • Closed-form expression in q , ˙ q for each term � ∂ C � L � T · ∂ C • Example : M i , j = ρ S ( s ) ( s ) d s ∂ q i ∂ q j 0 Time-solving • Mixed implicit/explicit Euler scheme M v + f = 0 avec v = ˙ q t +1 • Implicit elastic forces → Stable simulations
Discrete Geometry : Super-Clothoïd κ 2 κ 1 κ 0 d n i ∀ i ds ( s ) = Ω Ω Ω( s ) ∧ n i ( s ) R (0) = R 0
Discrete Geometry : Super-Clothoïd κ 2 κ 1 κ 0 d n i ∀ i ds ( s ) = Ω Ω Ω( s ) ∧ n i ( s ) R (0) = R 0 If κ 0 ( s ), κ 1 ( s ), κ 2 ( s ) are piecewise-linear
Discrete Geometry : Super-Clothoïd κ 2 κ 1 κ 0 d n i ∀ i ds ( s ) = Ω Ω Ω( s ) ∧ n i ( s ) R (0) = R 0 If κ 0 ( s ), κ 1 ( s ), κ 2 ( s ) are piecewise-linear
Discrete Geometry : Super-Clothoïd κ 2 κ 1 κ 0 d n i ∀ i ds ( s ) = Ω Ω Ω( s ) ∧ n i ( s ) R (0) = R 0 If κ 0 ( s ), κ 1 ( s ), κ 2 ( s ) are piecewise-linear • On each element, the solution is a 3D clothoïd
Discrete Geometry : Super-Clothoïd κ 2 κ 1 κ 0 d n i ∀ i ds ( s ) = Ω Ω Ω( s ) ∧ n i ( s ) R (0) = R 0 If κ 0 ( s ), κ 1 ( s ), κ 2 ( s ) are piecewise-linear • On each element, the solution is a 3D clothoïd • But no more closed-form solution...
Discrete Geometry : Super-Clothoïd κ 2 κ 1 κ 0 d n i ∀ i ds ( s ) = Ω Ω Ω( s ) ∧ n i ( s ) R (0) = R 0 If κ 0 ( s ), κ 1 ( s ), κ 2 ( s ) are piecewise-linear • On each element, the solution is a 3D clothoïd • But no more closed-form solution... • How to integrate both precisely and efficiently ? → Power-series computation [Casati and Bertails-Descoubes 2013]
Inverse Statics of a “Super-Model” Goal Given q , find q 0 , E I and ρ S such that q is a stable equilibrium
Inverse Statics of a “Super-Model” Goal Given q , find q 0 , E I and ρ S such that q is a stable equilibrium Equilibrium condition � q − q 0 � K ( E I ) · = F ( q , ρ S ) → Solve a linear problem of size ∼ 3 N
Inverse Statics of a “Super-Model” Goal Given q , find q 0 , E I and ρ S such that q is a stable equilibrium Equilibrium condition � q − q 0 � K ( E I ) · = F ( q , ρ S ) → Solve a linear problem of size ∼ 3 N Sufficient condition of stability E I ρ S ≥ A ( q )
Inverse Statics of a “Super-Model” Goal Given q , find q 0 , E I and ρ S such that q is a stable equilibrium Equilibrium condition � q − q 0 � K ( E I ) · = F ( q , ρ S ) → Solve a linear problem of size ∼ 3 N Sufficient condition of stability E I ρ S ≥ A ( q ) → Compute the eigen values of a real symmetric matrix (Details in [Derouet-Jourdan et al. 2010] )
Partial Conclusion • The static inversion is trivial for an isolated “Super-Model”
Partial Conclusion • The static inversion is trivial for an isolated “Super-Model” • The only one difficulty is “purely” geometric : How to convert a given curve as a piecewise helix/clothoïd ?
Partial Conclusion • The static inversion is trivial for an isolated “Super-Model” • The only one difficulty is “purely” geometric : How to convert a given curve as a piecewise helix/clothoïd ? • Robust and fast approximation algorithms can be designed Example : floating tangents algorithm [Derouet-Jourdan et al. 2013]
Open Problems • How to extend to contacting fibers (with friction) ? • How to generalize to elastic surfaces (plates / shells) ?
Open Problems • How to extend to contacting fibers (with friction) ? • How to generalize to elastic surfaces (plates / shells) ? → Work in progress...
And for contacting fibers ? Output : natural curvatures ( q 0 ) Input : set of curves ( q ) of Super-Helices → Interpret the geometry as a set of Super-Helices at equilibrium under gravity and frictional contacts
Inverse Modeling of Super-Helices Without contact K · ( q − q 0 ) = F ( q ) q 0 = q − K − 1 F ( q )
Inverse Modeling of Super-Helices Without contact With frictional contact � K · ( q − q 0 ) = F ( q ) K · ( q − q 0 ) = F ( q ) + H ( q ) ⊤ r r r r r ∈ int ( K µ ) (Coulomb’s cone) r K µ r r r ( A ) ( P ) ( B ) � q 0 = q − K − 1 · ( F ( q ) + H ( q ) ⊤ r r r ) r r ∈ int ( K µ ) r q 0 = q − K − 1 F ( q ) Underdetermined problem
Decoupling gravity and contacts
Our approach • Estimate q 0 : q 0
Our approach • Estimate q 0 : q 0 • Find the “best” force r r r , i.e., such that : q 0 � �� � 1 q − K − 1 ( H ⊤ r r + F ) − q 0 � 2 min 2 � r r r r s.t. r r ∈ int ( K µ ) r
Our approach • Estimate q 0 : q 0 • Find the “best” force r r r , i.e., such that : q 0 � �� � 1 r + F ) − q 0 � 2 + γ � r q − K − 1 ( H ⊤ r r � 2 min 2 � r r r r r s.t. r r ∈ int ( K µ ) r • γ : regularization parameter
Our approach • Estimate q 0 : q 0 • Find the “best” force r r r , i.e., such that : q 0 � �� � 1 r + F ) − q 0 � 2 + γ � r q − K − 1 ( H ⊤ r r � 2 min 2 � r r r r r s.t. r r ∈ int ( K µ ) r • γ : regularization parameter → Can be solved by reusing our direct solver for the dynamics ! (Details in [Derouet-Jourdan et al. 2013] )
Heuristics for estimating q 0
Heuristics for estimating q 0 1 q 0 = q ( L )
Heuristics for estimating q 0 1 q 0 = q ( L ) 2 q 0 = q
Heuristics for estimating q 0 1 q 0 = q ( L ) 2 q 0 = q Remember that : q 0 � �� � 1 r + F ) − q 0 � 2 + γ � r q − K − 1 ( H ⊤ r r � 2 min 2 � r r r r r s.t. r r r ∈ int ( K µ ) → Find r r r which minimizes the elastic energy of the rods
Results 3 hairstyles (a) 8,922 contacts, (b) 30,381 contacts, (c) 14,358 contacts, 5s 19s 15s
Discussion Many limitations... • Very simple heuristics to estimate q 0 • Large dependence upon the quality of input data • No stability criterion yet ( � = isolated case) • Many parameters are assumed to be known
Discussion Many limitations... • Very simple heuristics to estimate q 0 • Large dependence upon the quality of input data • No stability criterion yet ( � = isolated case) • Many parameters are assumed to be known ... And yet • Some plausible results • The proposed solution is an exact equilibrium • Very fast inversion (a few seconds)
And for Plates / Shells ?
And for Plates / Shells ? Case of a developable shell (ongoing work with A. Blumentals)
And for Plates / Shells ? Case of a developable shell (ongoing work with A. Blumentals) • Inextensibility yields 2 coupled Darboux problems
And for Plates / Shells ? Case of a developable shell (ongoing work with A. Blumentals) • Inextensibility yields 2 coupled Darboux problems • Constant material curvatures yield a closed-form surface One single element
Recommend










More recommend
Explore More Topics
Stay informed with curated content and fresh updates.