Multiagent Systems and Agent-based Simulation From theory to - PowerPoint PPT Presentation
Multiagent Systems and Agent-based Simulation From theory to transport application Prof. dr. St ephane GALLAND MTS 2015 Summer School Hasselt, Belgium IRTES-SeT, UTBM 90010 Belfort cedex, France stephane.galland@utbm.fr
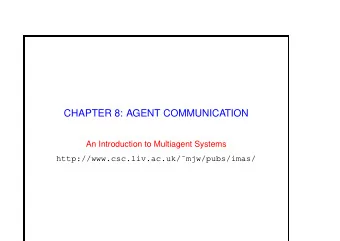
SARL Language 18 Multiagent Simulation Physic Environment Interactions between Agents Social Environment Holons Cyber-physical System Default Space: an Event Space Agent Event-driven interaction space. Behaviors Space 1 Addr-1 Default Space of a context, Addr2 Behavior 1 Space 2 Addr-2 Addr1 contains all agents of the Default Space Behavior 2 Addr-3 Addr1 considered context. Inner Context Behavior n Other Event: the specification of some agent Capacity1 Capacity2 Capacity3 Capacity4 Built-in Capacities occurrence in a Space that may potentially trigger effects by a Skill Container participant. S. Galland MTS 2015 – 14/07/2015
SARL Language 19 Multiagent Simulation Physic Environment Ping - Pong – Exchanging information between agents Social Environment Holons Cyber-physical System event Ping { var v a l u e : I n t e g e r agent PingAgent { new ( v : I n t e g e r ) { var count : I n t e g e r v a l u e = v on I n i t i a l i z e { } p r i n t l n (” S t a r t i n g PingAgent . . . ” ) } count = 0 i n (2000) [ sendPing ] event Pong { } var v a l u e : I n t e g e r def sendPing { new ( v : I n t e g e r ) { i f ( d e f a u l t S p a c e . v a l u e = v p a r t i c i p a n t s . s i z e > 1) { } emit ( new Ping ( count ) ) } count = count + 1 } e l s e { agent PongAgent { i n (2000) [ sendPing ] on I n i t i a l i z e { } p r i n t l n (” Waiting f o r ping ”) } } on Pong { on Ping { i n (1000) [ p r i n t l n (” Recv Ping : ”+o c c u r r e n c e . p r i n t l n (” Send Ping : ”+count ) v a l u e ) emit ( new Ping ( count ) ) p r i n t l n (” Send Pong : ”+o c c u r r e n c e . count = count + 1 v a l u e ) ] emit ( new Pong ( o c c u r r e n c e . v a l u e ) ) } } } } S. Galland MTS 2015 – 14/07/2015
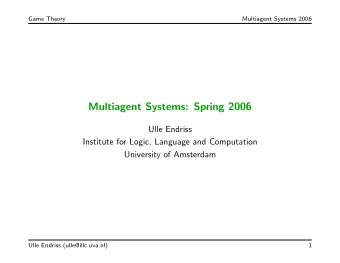
SARL Language 20 Multiagent Simulation Physic Environment Spaces and Contexts Social Environment Holons Cyber-physical System Contexts and Holonic properties All agents have at least DefaultContext ExternalContext 1 one context: the default Level n one. Default Space Addr15 Addr16 Addr17 Addr18 Default Space Addr-2 Addr-1 Addr12 Addr13 Addr14 All agents participate in Addr10 Addr11 Level n-1 the default space of all contexts they belong to. InnerContext Default Space Holonic Perspective Addr-4 Addr-5 Addr-3 Addr-6 Addr-7 (Holonic group) Other Space Addr-8 Addr-9 (Production group) All agents contains an internal context. Enable to build hierarchy of agents: holarchy. S. Galland MTS 2015 – 14/07/2015
SARL Language 21 Multiagent Simulation Physic Environment Social Environment Outline Holons Cyber-physical System 1 SARL Agent Programming Language Agent Technology - (really!) Brief Overview Programming Multiagent System in SARL Environment in Multiagent Systems 2 Multiagent Simulation 3 Simulation with a Physic Environment 4 Simulation with a Social Environment 5 Holon-based Simulation 6 Cyber-physical System S. Galland MTS 2015 – 14/07/2015
SARL Language 22 Multiagent Simulation Physic Environment Missions of the Environment [Weyns, 2005] Social Environment Holons Cyber-physical System M1 - Sharing informations: Environment is a shared structure for agents, where each of them perceives and acts. M2 - Managing agents actions and interactions: It is related to the management of agents’ simultaneous and joint actions and to the preservation of the environmental integrity: influence-reaction model [Ferber, 1996, Michel, 2004, Galland, 2009]. M3 - Managing perception and observation: Agents can manage the access to environmental informations and guarantee the partialness and localness of perceptions. M4 - Maintaining endogenous dynamics: The environment is an active entity; it can have its own processes, independently of the ones of the agents. S. Galland MTS 2015 – 14/07/2015
SARL Language 22 Multiagent Simulation Physic Environment Missions of the Environment [Weyns, 2005] Social Environment Holons Cyber-physical System M1 - Sharing informations: Environment is a shared structure for agents, where each of them perceives and acts. M2 - Managing agents actions and interactions: It is related to the management of agents’ simultaneous and joint actions and to the preservation of the environmental integrity: influence-reaction model [Ferber, 1996, Michel, 2004, Galland, 2009]. M3 - Managing perception and observation: Agents can manage the access to environmental informations and guarantee the partialness and localness of perceptions. M4 - Maintaining endogenous dynamics: The environment is an active entity; it can have its own processes, independently of the ones of the agents. S. Galland MTS 2015 – 14/07/2015
SARL Language 22 Multiagent Simulation Physic Environment Missions of the Environment [Weyns, 2005] Social Environment Holons Cyber-physical System M1 - Sharing informations: Environment is a shared structure for agents, where each of them perceives and acts. M2 - Managing agents actions and interactions: It is related to the management of agents’ simultaneous and joint actions and to the preservation of the environmental integrity: influence-reaction model [Ferber, 1996, Michel, 2004, Galland, 2009]. M3 - Managing perception and observation: Agents can manage the access to environmental informations and guarantee the partialness and localness of perceptions. M4 - Maintaining endogenous dynamics: The environment is an active entity; it can have its own processes, independently of the ones of the agents. S. Galland MTS 2015 – 14/07/2015
SARL Language 22 Multiagent Simulation Physic Environment Missions of the Environment [Weyns, 2005] Social Environment Holons Cyber-physical System M1 - Sharing informations: Environment is a shared structure for agents, where each of them perceives and acts. M2 - Managing agents actions and interactions: It is related to the management of agents’ simultaneous and joint actions and to the preservation of the environmental integrity: influence-reaction model [Ferber, 1996, Michel, 2004, Galland, 2009]. M3 - Managing perception and observation: Agents can manage the access to environmental informations and guarantee the partialness and localness of perceptions. M4 - Maintaining endogenous dynamics: The environment is an active entity; it can have its own processes, independently of the ones of the agents. S. Galland MTS 2015 – 14/07/2015
SARL Language 23 Multiagent Simulation Physic Environment Social Environment Environment on SARL Holons Cyber-physical System Dimensions of the Environment Execution Environment, Physic Environment, Social Environment. Key Ideas It is omnipresent. Manages access to resources and structures. Agents can interact with it via Capacities and Spaces. S. Galland MTS 2015 – 14/07/2015
SARL Language 24 Multiagent Simulation Physic Environment Social Environment Execution Dimension Holons Cyber-physical System Execution Environment requirements Handles Agent’s Lifecycle Provides Built-in Capacities Implements SARL concepts Handles resources Janus as SARL Execution Environment Fully distributed. Dynamic discovery of Kernels. Automatic synchronization of kernels’ data (easy recovery). Micro-Kernel implementation. http://www.janusproject.io S. Galland MTS 2015 – 14/07/2015
SARL Language 25 Multiagent Simulation Physic Environment Physic Dimension Social Environment Holons Cyber-physical System Physic Environment Class of real or simulated systems in which agents and objects have an explicit position, and that produce localized actions. Properties Contains all objects Agents interact with it via dedicated Capacities Agents’ Bodies are “managed” by the Environment Multiple “Views” of the environment can be implemented (1D, 2D, 3D) Enforces Universal Laws (e.g. Laws of physics) S. Galland MTS 2015 – 14/07/2015
SARL Language 26 Multiagent Simulation Physic Environment Social Environment Social Dimension Holons Cyber-physical System Multiple ways of agent interaction: event, messages, stigmergy... Multiple models of agent relationship: authority, auction, contract-net-protocol... Supported by Space / Space Specification. Default Interaction Space: based on events (may be redefined). Programmer can create new Space Specifications (and ways of interacting): FIPA, Organizational (MOISE, CRIO, etc). Social dimension could influence other dimensions [Galland, 2015]. S. Galland MTS 2015 – 14/07/2015
SARL Language 27 Multiagent Simulation Physic Environment Social Environment Outline Holons Cyber-physical System 1 SARL Agent Programming Language 2 Multiagent Simulation Simulation Fundamentals Multiagent Based Simulation (MABS) Overview of a MABS Architecture Agent Architectures 3 Simulation with a Physic Environment 4 Simulation with a Social Environment 5 Holon-based Simulation 6 Cyber-physical System S. Galland MTS 2015 – 14/07/2015
SARL Language 28 Multiagent Simulation Physic Environment Social Environment Outline Holons Cyber-physical System 1 SARL Agent Programming Language 2 Multiagent Simulation Simulation Fundamentals Multiagent Based Simulation (MABS) Overview of a MABS Architecture Agent Architectures 3 Simulation with a Physic Environment 4 Simulation with a Social Environment 5 Holon-based Simulation 6 Cyber-physical System S. Galland MTS 2015 – 14/07/2015
SARL Language 29 Multiagent Simulation Physic Environment Social Environment A Definition of Simulation Holons Cyber-physical System [Shannon, 1977] The process of designing a model of a real system and conducting experiments with this model for the purpose either of understanding the behavior of the system or of evaluating various strategies (within the limits imposed by a criterion or a set of criteria) for the operation of the system. Why simulate? Understand / optimize a system. Scenarii/strategies evaluation, testing hypotheses to explain a phenomenom (decision-helping tool). Predicting the evolution of a system, e.g. , metrology. S. Galland MTS 2015 – 14/07/2015
SARL Language 30 Multiagent Simulation Physic Environment Social Environment Simulation Basics Holons Cyber-physical System Real System System Model Abstraction/Simplification/Focus Explanation/Optimization/Prediction Tuning model Simulation Confrontation Observations Simulation results/outputs Experimental results S. Galland MTS 2015 – 14/07/2015
SARL Language 31 Multiagent Simulation Modeling Relation: System ↔ Model Physic Environment Social Environment [Zeigler, 2000] Holons Cyber-physical System Modeling Relation Simulation Relation Is the model valid? Is the simulator valid? Real System System Model Simulation Modeling Implementation To determine if the system model is an acceptable simplificiation in terms of quality criteria and experimentation objectives. Directly related to the consistency of the model simulation. S. Galland MTS 2015 – 14/07/2015
SARL Language 32 Multiagent Simulation Simulation Relation: Model ↔ Simulator Physic Environment Social Environment [Zeigler, 2000] Holons Cyber-physical System Modeling Relation Simulation Relation Is the model valid? Is the simulator valid? Real System System Model Simulation Modeling Implementation To guarantee that the simulator, used to implement the model, correctly generates the behavior of the model. To be sure that the simulator reproduces clearly the mechanisms of change of state are formalized in the model. S. Galland MTS 2015 – 14/07/2015
SARL Language 33 Multiagent Simulation Physic Environment Classical Topology of the Simulation Social Environment Holons Cyber-physical System Topology according to the granularity of the simulation, the level of details that is possible in the model [Hoogendoorn, 2001, Davidsson, 2000]. Microscopic Simulation: Explicitly attempts to model the behaviors of each individual. The system structure is viewed as emergent from the interactions between the individuals. Macroscopic Simulation: Mesoscopic Simulation: Multilevel Simulation: S. Galland MTS 2015 – 14/07/2015
SARL Language 33 Multiagent Simulation Physic Environment Classical Topology of the Simulation Social Environment Holons Cyber-physical System Topology according to the granularity of the simulation, the level of details that is possible in the model [Hoogendoorn, 2001, Davidsson, 2000]. Microscopic Simulation: Macroscopic Simulation: Based on mathematical models, where the characteristics of a population are averaged together. Simulate changes in these averaged characteristics for the whole population. The set of individuals is viewed as a structure that can be characterized by a number of variables. Mesoscopic Simulation: Multilevel Simulation: S. Galland MTS 2015 – 14/07/2015
SARL Language 33 Multiagent Simulation Physic Environment Classical Topology of the Simulation Social Environment Holons Cyber-physical System Topology according to the granularity of the simulation, the level of details that is possible in the model [Hoogendoorn, 2001, Davidsson, 2000]. Microscopic Simulation: Macroscopic Simulation: Mesoscopic Simulation: Something in between. Multilevel Simulation: S. Galland MTS 2015 – 14/07/2015
SARL Language 33 Multiagent Simulation Physic Environment Classical Topology of the Simulation Social Environment Holons Cyber-physical System Topology according to the granularity of the simulation, the level of details that is possible in the model [Hoogendoorn, 2001, Davidsson, 2000]. Microscopic Simulation: Macroscopic Simulation: Mesoscopic Simulation: Multilevel Simulation: combines various levels (micro-macro for example). S. Galland MTS 2015 – 14/07/2015
SARL Language 33 Multiagent Simulation Physic Environment Classical Topology of the Simulation Social Environment Holons Cyber-physical System Topology according to the granularity of the simulation, the level of details that is possible in the model [Hoogendoorn, 2001, Davidsson, 2000]. Microscopic Simulation: Macroscopic Simulation: Mesoscopic Simulation: Multilevel Simulation: Multiagent-based Simulation (MABS) is traditionnally considered as a special form of microscopic simulation, but not restricted to. S. Galland MTS 2015 – 14/07/2015
SARL Language 34 Multiagent Simulation Physic Environment Social Environment Outline Holons Cyber-physical System 1 SARL Agent Programming Language 2 Multiagent Simulation Simulation Fundamentals Multiagent Based Simulation (MABS) Overview of a MABS Architecture Agent Architectures 3 Simulation with a Physic Environment 4 Simulation with a Social Environment 5 Holon-based Simulation 6 Cyber-physical System S. Galland MTS 2015 – 14/07/2015
SARL Language 35 Multiagent Simulation Physic Environment MABS: Main Characteristics and Advantages Social Environment Holons Cyber-physical System More flexible than macroscopic models to simulate spatial and evolutionary phenomena. Dealing with real multiagent systems directly: real Agent = simulated Agent. Allows modelling of adaptation and evolution. Heterogeneous space and population. Multilevel modeling: integrate different levels of observation, and of agent’s behaviors. S. Galland MTS 2015 – 14/07/2015
SARL Language 36 Multiagent Simulation Physic Environment Social Environment MABS: Limitations and Drawbacks Holons Cyber-physical System Offer a significant level of accuracy at the expense of a larger computational cost. Require many and accurate data for their initialization. It is difficult to apply to large scale systems. Actual simulation models are costly in time and effort. S. Galland MTS 2015 – 14/07/2015
SARL Language 37 Multiagent Simulation Physic Environment Social Environment MABS: General Idea Holons Cyber-physical System Create an artificial world composed of interacting agents. The behavior of an agent results from: its perceptions/observations; its internal motivations/goals/beliefs/desires; its eventual representations; its interaction with the environment (indirect interactions, ressources) and the other agents (communications, direct interactions, stimuli). Agents act and modify the state of the environment through their actions. We observe the results of the interactions like in a Virtual Lab ⇒ Emergence. S. Galland MTS 2015 – 14/07/2015
SARL Language 38 Multiagent Simulation Physic Environment Social Environment Outline Holons Cyber-physical System 1 SARL Agent Programming Language 2 Multiagent Simulation Simulation Fundamentals Multiagent Based Simulation (MABS) Overview of a MABS Architecture Agent Architectures 3 Simulation with a Physic Environment 4 Simulation with a Social Environment 5 Holon-based Simulation 6 Cyber-physical System S. Galland MTS 2015 – 14/07/2015
SARL Language 39 Multiagent Simulation Physic Environment Multiagent Simulation Social Environment Holons Cyber-physical System Agent Agent Direct interaction Actions Perceptions Environment - Resources, services, objects - Rules, laws - Physical structures (spatial and topological) - Communication structures (stigmergy, implicit communication) - Social structure S. Galland MTS 2015 – 14/07/2015
SARL Language 40 Multiagent Simulation Designing a Multiagent Simulation Model Physic Environment Social Environment [Michel, 2004] Holons Cyber-physical System Definitions of Behaviors Environment action, perception, and conflict Internal Agent Architecture Physical objects of the world, resolution their structuring, environment Modeling of agent deliberation dynamics (evaporation...) processes (agent mind) implies manages implies Scheduling Interaction Temporal dynamic of the system manages Modeling the concurrent events Modeling of the time progress, Modeling the results of actions and of the agent scheduling and interactions at a given time S. Galland MTS 2015 – 14/07/2015
SARL Language 41 Multiagent Simulation Physic Environment Social Environment Outline Holons Cyber-physical System 1 SARL Agent Programming Language 2 Multiagent Simulation Simulation Fundamentals Multiagent Based Simulation (MABS) Overview of a MABS Architecture Agent Architectures 3 Simulation with a Physic Environment 4 Simulation with a Social Environment 5 Holon-based Simulation 6 Cyber-physical System S. Galland MTS 2015 – 14/07/2015
SARL Language 42 Multiagent Simulation Physic Environment Classical Agent Architectures Social Environment Holons Cyber-physical System There is plenty of agent architectures from the literature. Subsomption Architecture: [Brooks, 1990] Priority-ordering sequence of condition-action tuples. condition 1 action 1 if condition 1 then inputs action 1 else condition 2 action 2 if condition 2 then action 2 else condition n action n . . . output end if end if ∅ Force-based model: [Helbing, 1997] [Reynolds, 1999] Belief, Desire, Intention (BDI): [Rao, 1995] Others: S. Galland MTS 2015 – 14/07/2015
SARL Language 42 Multiagent Simulation Physic Environment Classical Agent Architectures Social Environment Holons Cyber-physical System There is plenty of agent architectures from the literature. Subsomption Architecture: [Brooks, 1990] Force-based model: [Helbing, 1997] [Reynolds, 1999] � n � � − − − − − − − − → α i . � p − a i � � n i =1 a i � � f = + β. − p | − − − → p − a i | n i =1 a 2 a 2 a 2 a 1 a 1 a 1 p p p + + a 3 a 3 a 3 separation alignment cohesion Belief, Desire, Intention (BDI): [Rao, 1995] Others: S. Galland MTS 2015 – 14/07/2015
SARL Language 42 Multiagent Simulation Physic Environment Classical Agent Architectures Social Environment Holons Cyber-physical System There is plenty of agent architectures from the literature. Subsomption Architecture: [Brooks, 1990] Force-based model: [Helbing, 1997] [Reynolds, 1999] Belief, Desire, Intention (BDI): [Rao, 1995] Beliefs Desires Intentions Inputs Control flow Belief Generate Action Filtering recognition options selection Outputs Others: S. Galland MTS 2015 – 14/07/2015
SARL Language 42 Multiagent Simulation Physic Environment Classical Agent Architectures Social Environment Holons Cyber-physical System There is plenty of agent architectures from the literature. Subsomption Architecture: [Brooks, 1990] Force-based model: [Helbing, 1997] [Reynolds, 1999] Belief, Desire, Intention (BDI): [Rao, 1995] Others: state machines, activity diagrams, expert systems, goal-oriented algorithms. . . S. Galland MTS 2015 – 14/07/2015
SARL Language 43 Multiagent Simulation Physic Environment Social Environment Outline Holons Cyber-physical System 1 SARL Agent Programming Language 2 Multiagent Simulation 3 Simulation with a Physic Environment General Principles Traffic Simulation Pedestrian Simulation 4 Simulation with a Social Environment 5 Holon-based Simulation 6 Cyber-physical System S. Galland MTS 2015 – 14/07/2015
SARL Language 44 Multiagent Simulation Physic Environment Social Environment Outline Holons Cyber-physical System 1 SARL Agent Programming Language 2 Multiagent Simulation 3 Simulation with a Physic Environment General Principles Traffic Simulation Pedestrian Simulation 4 Simulation with a Social Environment 5 Holon-based Simulation 6 Cyber-physical System S. Galland MTS 2015 – 14/07/2015
SARL Language 45 Multiagent Simulation Physic Environment Situated Environment Model [Galland, 2009] Social Environment Holons Cyber-physical System Agent Agent Direct interaction Behavioral component Agent mind Environment Interface Environment Physical component Agent body - Resources - Physical structures Influence - Physical rules Perception Influence Influence Solver Environment Dynamics Perception data structure ensure valid environment state Engine spatial tree, grid, graph according to environment laws Environmental Object Collection Environment's State S. Galland MTS 2015 – 14/07/2015
SARL Language 46 Multiagent Simulation Physic Environment Body-Mind Distinction [Galland, 2009] Social Environment Holons Cyber-physical System Agent Agent mind State variables of the Behavior decisional component Readable/modifiable perception Filtered Action only by the agent Agent memory Environment Interface Agent body State variables of the physical component Physical Perception attributes Action Readable by the agent filter (x,y,z), V(t) filter Modifiable by the environment a(t) Perception Influence S. Galland MTS 2015 – 14/07/2015
SARL Language 47 Multiagent Simulation Physic Environment Physic Environment in SARL Social Environment Holons Cyber-physical System The agent has the capacity to use its body. The body supports the interactions with the environment. event P e r c e p t i o n { s k i l l PhysicBody implements v a l o b j e c t : Object E n v i r o n m e n t I n t e r a c t i o n { v a l r e l a t i v e P o s i t i o n : Vector v a l env : PhysicEnvironment } v a l body : Object def moveTheBody ( motion : Vector ) { c a p a c i t y E n v i r o n m e n t I n t e r a c t i o n { move ( t h i s . body , motion ) moveTheBody ( motion : Vector ) } move ( o b j e c t : Object , motion : Vector ) def move ( o b j e c t : Object , motion : executeActionOn ( o b j e c t : Object , Vector ) { actionName : String , parameters : env . move ( object , motion ) Object ✯ ) } } } c l a s s PhysicEnvironmentImpl space PhysicEnvironment { implements PhysicEnvironment { move ( o b j e c t : Object , motion : Vector ) p u b l i c void move ( Object object , } Vector motion ) { // . . . } } S. Galland MTS 2015 – 14/07/2015
SARL Language 48 Multiagent Simulation Physic Environment Social Environment Outline Holons Cyber-physical System 1 SARL Agent Programming Language 2 Multiagent Simulation 3 Simulation with a Physic Environment General Principles Traffic Simulation Pedestrian Simulation 4 Simulation with a Social Environment 5 Holon-based Simulation 6 Cyber-physical System S. Galland MTS 2015 – 14/07/2015
SARL Language 49 Multiagent Simulation Physic Environment Driving Activity Social Environment Holons Cyber-physical System Each vehicle is simulated but road signs are skipped ⇒ mesoscopic simulation. The roads are extracted from a Geographical Information Database. The simulation model is composed of two parts [Galland, 2009]: 1 the environment: the model of the road network, and the vehicles. 2 the driver model: the behavior of the driver linked to a single vehicle. S. Galland MTS 2015 – 14/07/2015
SARL Language 50 Multiagent Simulation Physic Environment Model of the Environment [Galland, 2009] Social Environment Holons Cyber-physical System Road Network � � � Road polylines: S = � path , objects � � path = � ( x 0 , y 0 ) · · · � Graph: G = { S , S �→ S , S �→ S } = { segments , entering , exiting } Operations Compute the set of objects perceived by a driver (vehicles, roads...): distance ( d , o ) ≤ ∆ ∧ � � P = o o ∈ O ∧ � � ∀ ( s 1 , s 2 ) , path = s 1 . � p , O � . s 2 � where path is the roads followed by a driver d . Move the vehicles, and avoid physical collisions. S. Galland MTS 2015 – 14/07/2015
SARL Language 51 Multiagent Simulation Physic Environment Architecture of the Driver Agent Social Environment Holons Cyber-physical System Path planning path to follow Collision avoidance perceived objects instant acceleration Car new position ENVIRONMENT JaSim model [Galland, 2009] S. Galland MTS 2015 – 14/07/2015
SARL Language 52 Multiagent Simulation Physic Environment Path Planning Social Environment Holons Cyber-physical System Based on the A* algorithm [Dechter, 1985, Delling, 2009]: extension of the Dijkstra’s algorithm: search shortest paths between the nodes of a graph. introduce the heuristic function h to explore first the nodes that permits to converge to the target node. Inspired by the D*-Lite algorithm [Koenig, 2005]: A* family. supports dynamic changes in the graph topology and the values of the edges. S. Galland MTS 2015 – 14/07/2015
SARL Language 53 Multiagent Simulation Physic Environment Social Environment Collision Avoidance Holons Cyber-physical System Principle: compute the acceleration of the vehicle to avoid collisions with the other vehicles. Intelligent Driver Model [Treiber, 2000] − ( v ∆ v ) 2 if the ahead object is far 4 b ∆ p 2 followerDriving = − a ( s + vw ) 2 if the ahead object is near ∆ p 2 Free driving: � v � � 4 � freeDriving = a 1 − v c See driver algorithm S. Galland MTS 2015 – 14/07/2015
SARL Language 54 Multiagent Simulation Physic Environment Highway Simulation Social Environment Holons Cyber-physical System What is simulated? 1 Vehicles on a French highway. 2 Danger event → “an animal is crossing the highway and causes a crash”. 3 Alert events by GSM. 4 Arrival of the security and rescue services. S. Galland MTS 2015 – 14/07/2015
SARL Language 54 Multiagent Simulation Physic Environment Highway Simulation Social Environment Holons Cyber-physical System What is simulated? 1 Vehicles on a French highway. 2 Danger event → “an animal is crossing the highway and causes a crash”. 3 Alert events by GSM. 4 Arrival of the security and rescue services. S. Galland MTS 2015 – 14/07/2015
SARL Language 54 Multiagent Simulation Physic Environment Highway Simulation Social Environment Holons Cyber-physical System What is simulated? 1 Vehicles on a French highway. 2 Danger event → “an animal is crossing the highway and causes a crash”. 3 Alert events by GSM. 4 Arrival of the security and rescue services. S. Galland MTS 2015 – 14/07/2015
SARL Language 54 Multiagent Simulation Physic Environment Highway Simulation Social Environment Holons Cyber-physical System What is simulated? 1 Vehicles on a French highway. 2 Danger event → “an animal is crossing the highway and causes a crash”. 3 Alert events by GSM. 4 Arrival of the security and rescue services. S. Galland MTS 2015 – 14/07/2015
SARL Language 55 Multiagent Simulation Physic Environment Social Environment Video Holons Cyber-physical System These videos were realized on the SIMULATE tool Voxelia S.A.S S. Galland MTS 2015 – 14/07/2015
SARL Language 56 Multiagent Simulation Physic Environment Social Environment Outline Holons Cyber-physical System 1 SARL Agent Programming Language 2 Multiagent Simulation 3 Simulation with a Physic Environment General Principles Traffic Simulation Pedestrian Simulation 4 Simulation with a Social Environment 5 Holon-based Simulation 6 Cyber-physical System S. Galland MTS 2015 – 14/07/2015
SARL Language 57 Multiagent Simulation Physic Environment Social Environment Pedestrian Simulation Holons Cyber-physical System What is simulated? 1 Movements of pedestrians at a microscopic level. 2 Force-based model for avoiding collisions. [Buisson, 2013] S. Galland MTS 2015 – 14/07/2015
SARL Language 57 Multiagent Simulation Physic Environment Social Environment Pedestrian Simulation Holons Cyber-physical System What is simulated? 1 Movements of pedestrians at a microscopic level. 2 Force-based model for avoiding collisions. [Buisson, 2013] S. Galland MTS 2015 – 14/07/2015
SARL Language 58 Multiagent Simulation Physic Environment Force to Apply to Each Agent Social Environment Holons Cyber-physical System The force to apply to each agent is: p t − p a � F a = � � F + w a .δ � � F � � � p t − p a � ˆ S 1 � � c ) · ˆ U ( t i F = S i P a P t i ∈ M � F : collision-avoidance force. ˆ ˆ S 2 S i : a sliding force. t i c : time to collision to object i . U ( t ): scaling function of the time to collision. M : set objects around (including the other ˆ S 2 agents). w a : weight of the attractive force. δ x g : is g if x ≤ 0, 0 otherwise. S. Galland MTS 2015 – 14/07/2015
SARL Language 59 Multiagent Simulation Physic Environment Sliding Force Social Environment Holons Cyber-physical System The sliding force � S i is: s j = ( p j − p a ) × ˆ � y p t − p a )) � s j ˆ S j = sign( � s j · ( � � � s j � ˆ y : vertical unit vector. − ˆ S j p t p j P a ˆ S j S. Galland MTS 2015 – 14/07/2015
SARL Language 60 Multiagent Simulation Physic Environment Scaling the Sliding Force Social Environment Holons Cyber-physical System How to scale ˆ S j to obtain the repulsive force? Many force-based models use a monotonic decreasing function of the distance to an obstacle. But it does not support the velocity of the agent. Solution: Use time-based force scaling function. � σ σ t φ − if 0 ≤ t ≤ t max t max φ U ( t ) = 0 if t > t max t : estimated time to collision. t max : the maximum anticipation time. σ and φ are constants, such that U ( t max ) = 0. S. Galland MTS 2015 – 14/07/2015
SARL Language 61 Multiagent Simulation Physic Environment Social Environment Videos Holons Cyber-physical System These videos were realized on the SIMULATE tool Voxelia S.A.S S. Galland MTS 2015 – 14/07/2015
SARL Language 62 Multiagent Simulation Physic Environment Social Environment Outline Holons Cyber-physical System 1 SARL Agent Programming Language 2 Multiagent Simulation 3 Simulation with a Physic Environment 4 Simulation with a Social Environment Organizational Modeling Carpooling Simulation 5 Holon-based Simulation 6 Cyber-physical System S. Galland MTS 2015 – 14/07/2015
SARL Language 63 Multiagent Simulation Physic Environment Social Environment Outline Holons Cyber-physical System 1 SARL Agent Programming Language 2 Multiagent Simulation 3 Simulation with a Physic Environment 4 Simulation with a Social Environment Organizational Modeling Carpooling Simulation 5 Holon-based Simulation 6 Cyber-physical System S. Galland MTS 2015 – 14/07/2015
SARL Language 64 Multiagent Simulation Physic Environment Organizational Approach Social Environment Holons Cyber-physical System Recently, a particular interest has been given to the use of organizational concepts within MAS where the concepts of “organizations”, “groups”, “communities”, “roles”, “functions”, etc. play an important role. They permits to break the design complexity down by focusing on the organizations, the roles, and the interactions between the roles. Several works from literature: Agent-Group-Role (AGR) [Ferber, 1998, Ferber, 2004] Moise [Hannoun, 2000, H¨ ubner, 2002] Capacity-Role-Interaction-Organization [Hilaire, 2000, Cossentino, 2010] S. Galland MTS 2015 – 14/07/2015
SARL Language 65 Multiagent Simulation Physic Environment CRIO Concepts Social Environment Holons Cyber-physical System Organization An organization is defined by a collection of roles that take part in systematic institutionalized patterns of interactions with other roles in a common context. This context consists in shared knowledge and social rules/norms, social feelings, etc and is defined according to an ontology. The aim of an organization is to fulfill some requirements. Source: http://www.aspecs.org , and [Cossentino, 2010] S. Galland MTS 2015 – 14/07/2015
SARL Language 66 Multiagent Simulation Physic Environment CRIO Concepts Social Environment Holons Cyber-physical System Role An expected behavior (a set of role tasks ordered by a plan) and a set of rights and obligations in the organization context. The goal of each role is to contribute to the fulfillment of (a part of) the requirements of the organization within which it is defined. A role can be instantiated either as a Common Role or Boundary Role. Source: http://www.aspecs.org , and [Cossentino, 2010] S. Galland MTS 2015 – 14/07/2015
SARL Language 67 Multiagent Simulation Physic Environment CRIO Concepts Social Environment Holons Cyber-physical System Group An instance [. . . ] of an Organization [. . . ]. It is used to model an aggregation of roles played by agents. Source: http://www.aspecs.org , and [Cossentino, 2010] S. Galland MTS 2015 – 14/07/2015
SARL Language 68 Multiagent Simulation Physic Environment CRIO Concepts Social Environment Holons Cyber-physical System Agent An entity that adopts a decision in order to obtain the satisfaction of one or more of its own goals. An agent may play a set of roles within various groups. These roles interact each other in the specific context provided by the entity itself. The entity context is given by the knowledge, the capacities owned by the entity itself. Roles share this context by the simple fact of being part of the same entity. Source: http://www.aspecs.org , and [Cossentino, 2010] S. Galland MTS 2015 – 14/07/2015
SARL Language 69 Multiagent Simulation Physic Environment Example: Market-like Community Social Environment Holons Cyber-physical System 1 Client is requesting to Broker the best offer for a service. 2 Broker is contacting Providers for offer submission and select the best one. 3 Broker is giving back to Client the best offer. 4 Client and Provider are contracting. S. Galland MTS 2015 – 14/07/2015
SARL Language 70 Multiagent Simulation Physic Environment Example: SARL implementation Social Environment Holons Cyber-physical System S. Galland MTS 2015 – 14/07/2015
SARL Language 71 Multiagent Simulation Physic Environment Example: SARL implementation Social Environment Holons Cyber-physical System b e h a v i o r P r o v i d e r B r o k e r { uses P r o p o s a l S e l e c t i o n var p r o p o s a l s : C o l l e c t i o n < Proposal > var p r o v i d i n g : ProvidingSpace on C l i e n t R e q u e s t { p r o v i d i n g . emit ( new C a l l ( o c c u r r e n c e ) ) i n ( 1 . hours ) [ var best = s e l e c t ( p r o p o s a l s ) var r e p l y E v e n t = new C o n t r a c t i n g { r e q u e s t = > occurrence , p a r t n e r = > best . source } wake ( r e p l y E v e n t ) ] } on Proposal { p r o p o s a l s = p r o p o s a l s + o c c u r r e n c e } } S. Galland MTS 2015 – 14/07/2015
SARL Language 72 Multiagent Simulation Physic Environment Social Environment Outline Holons Cyber-physical System 1 SARL Agent Programming Language 2 Multiagent Simulation 3 Simulation with a Physic Environment 4 Simulation with a Social Environment Organizational Modeling Carpooling Simulation 5 Holon-based Simulation 6 Cyber-physical System S. Galland MTS 2015 – 14/07/2015
SARL Language 73 Multiagent Simulation Physic Environment Carpooling Simulation Model Social Environment Holons Cyber-physical System For each day, for each individual 1 Select the best transport mode according to the individual characteristics. 2 Create a motive to carpool. 3 Communicate this motive with other agents. 4 Negotiate a plan with the interested agents. 5 Execute the agreed plans. 6 Provide a feedback to all concerned agents. [Galland, 2013] S. Galland MTS 2015 – 14/07/2015
SARL Language 74 Multiagent Simulation Physic Environment Activity Diagram for an Agent Social Environment Holons Cyber-physical System S. Galland MTS 2015 – 14/07/2015
SARL Language 75 Multiagent Simulation Physic Environment Social Exploration Social Environment Holons Cyber-physical System Goal Explore the social network of the agent to determine potential carpooling partners. If no partner was found, explore the global trip database (website...) Partner Selection Three similarities are used for potential matchings: 1 Profile similarity, 2 Path similarity, and 3 Time window similarity. S. Galland MTS 2015 – 14/07/2015
SARL Language 76 Multiagent Simulation Physic Environment Profile Similarity Social Environment Holons Cyber-physical System Profile of the agent A Set of attributes, named a A with | a A | = N A Profile Similarity Distance between two attribute sets a 0 and a 1 : � � ( a 0 [ i ] − a 1 [ i ]) 2 � � i ∈ a 0 ∩ a 1 � d ( a 0 , a 1 ) = | a 0 ∩ a 1 | Continuous variables are combined into a single distance value d C Discrete variables are combined into a single value d D ∈ [0 , 1] Similarities: s C = 1 − d C s D = 1 − d D S. Galland MTS 2015 – 14/07/2015
SARL Language 77 Multiagent Simulation Physic Environment Path Similarity Social Environment Holons Cyber-physical System c ( O a , D a ) pathSim ( p a , p b ) = c ( O a , O b ) + c ( O b , D b ) + c ( D b , D a ) where c ( i , j ) denote the cost from the length of the path from i to j and the corresponding travel duration. S. Galland MTS 2015 – 14/07/2015
SARL Language 78 Multiagent Simulation Physic Environment Time Window Similarity Social Environment Holons Cyber-physical System Time window of a trip a trip A is defined by a path and a time window i A = [ ⊥ i A , ⊤ i A ] Time Interval Similarity tis ( i A , i B ) = min( ⊤ i A , ⊤ i B ) − max( ⊥ i A , ⊥ i B ) t ⊥ i A ⊤ i A tis ( i A , i B ) t ⊥ i B ⊤ i B S. Galland MTS 2015 – 14/07/2015
SARL Language 79 Multiagent Simulation Physic Environment Carpooling Negotiation Social Environment Holons Cyber-physical System Each potential partner is invited to play the role Partner in the Negotiation Pool organization. Organizational metamodel Capacity-Role-Interaction-Organization (CRIO) [Cossentino, 2010] They interacts together to negotiate the time window of the trip. S. Galland MTS 2015 – 14/07/2015
SARL Language 80 Multiagent Simulation Physic Environment Negotiation Procotol (part of) Social Environment Holons Cyber-physical System S. Galland MTS 2015 – 14/07/2015
SARL Language 81 Multiagent Simulation Physic Environment Social Environment Time Preference Function Holons Cyber-physical System Each agent A gives its preferences for the time of boarding/alighting: f A : R ⇒ R : t �→ f A ( t ) ∈ [0 , 1] 1 0 t S. Galland MTS 2015 – 14/07/2015
SARL Language 82 Multiagent Simulation Physic Environment Time Interval Suitability Social Environment Holons Cyber-physical System Evaluate the suitability of times for boarding/alighting: �� t + C f A ( x ) · f B ( x ) dx if t ∈ [max( ⊥ i A , ⊥ i B ) , min( ⊤ i A , ⊤ i B ) − C ] t 0 otherwise Each agent uses this suitability to slightly adapt to the time window. 1 1 f A f A · f B 0 0 t t C 1 1 f B tis 0 0 t t C S. Galland MTS 2015 – 14/07/2015
SARL Language 83 Multiagent Simulation Physic Environment Social Environment Outline Holons Cyber-physical System 1 SARL Agent Programming Language 2 Multiagent Simulation 3 Simulation with a Physic Environment 4 Simulation with a Social Environment 5 Holon-based Simulation Definitions Virtual-enterprise Example 6 Cyber-physical System S. Galland MTS 2015 – 14/07/2015
SARL Language 84 Multiagent Simulation Physic Environment Social Environment Outline Holons Cyber-physical System 1 SARL Agent Programming Language 2 Multiagent Simulation 3 Simulation with a Physic Environment 4 Simulation with a Social Environment 5 Holon-based Simulation Definitions Virtual-enterprise Example 6 Cyber-physical System S. Galland MTS 2015 – 14/07/2015
SARL Language 85 Multiagent Simulation Physic Environment Social Environment Definition of a Holon Holons Cyber-physical System Holon (Philosophy) [Koestler, 1967] A holon is something that is simultaneously a whole and a part. A holon is a self-similar structure composed of holons as sub-structures. DefaultContext ExternalContext 1 Level n Default Space Addr15 Addr16 Addr17 Addr18 Default Space Addr-2 Addr-1 Addr12 Addr13 Addr14 Addr10 Addr11 Level n-1 InnerContext Default Space Addr-4 Addr-5 Addr-3 Addr-6 Addr-7 (Holonic group) Other Space Addr-8 Addr-9 (Production group) S. Galland MTS 2015 – 14/07/2015
SARL Language 86 Multiagent Simulation Physic Environment Social Environment Outline Holons Cyber-physical System 1 SARL Agent Programming Language 2 Multiagent Simulation 3 Simulation with a Physic Environment 4 Simulation with a Social Environment 5 Holon-based Simulation Definitions Virtual-enterprise Example 6 Cyber-physical System S. Galland MTS 2015 – 14/07/2015
Recommend







More recommend
Explore More Topics
Stay informed with curated content and fresh updates.